AGV介绍
在工厂中一般称为无人搬运小车
AGV类型
背托式AGV(潜入式AGV)

牵引式AGV
传输带式AGV
这集中就是我之前参与过的类型
核心技术
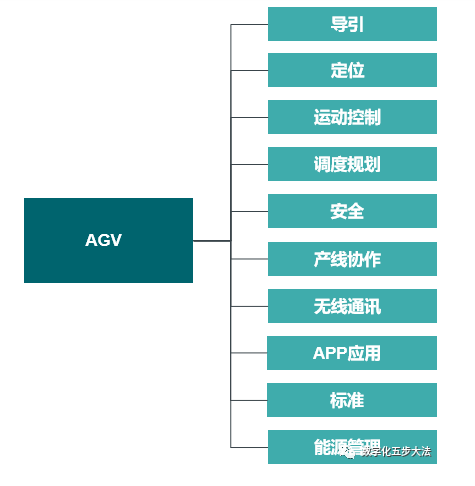
导航:磁导航、视觉导航、激光导航、二维码导航
磁导航原理
磁带导航技术与电磁导航相近,不同之处在于采用了在路面上贴磁带替代在地面下埋设金属线,通过磁带感应信号实现导引。
二维码导航原理
根据车载相机扫描地面二维码信息,根据二维码信息以及方向定位和判定改位置的属性,诸如货架站点、取货站点、充电站点、高/低速路径等,控制系统根据任务以及其他车辆在系统中的位置进行路径安排和导航。
潜入式AGV
导航:磁导航

当感应到磁导航信号的时候,传感器对应的位置会有输入IO信号,当信号就会告诉运动控制卡。
运动控制:控制卡

导航的输入信号输入驱动控制,然后根据输入的信号控制电机单元,控制卡会控制驱动转弯。
定位:RFID
在地面嵌入RFID 判断路径上的地址。
信号交互
硬件直接交互:一般如果需要跟设备或者机床交互的话,可以在AGV和设备上放对射传感器,例如4入4出就代硬件可以交互,有16种组合,例如1代表到达站点,2准备卸料等。
上位控制交互:多个信号都直接与上位系统挂钩交互信号。
调度规划:上位机+PLC
我之前做的AGV都是PLC控制,可以直接与PLC通信,基本原理都是一个起点,一个终点,中间路线,可以直接把路线规划的地址直接发给PLC,这样就算工厂环境复杂,距离很远通信不稳定也可以由PLC直接走完,如果网络稳定可以实时的控制AGV路线。
无线通信:WIFI,ZIGBEE等
能源管理:自动充电
早期的AGV都是需要换电瓶或者插拔式充电,现在基本都是使用无线充电了
简易地图:
这个图主要有2个功能:
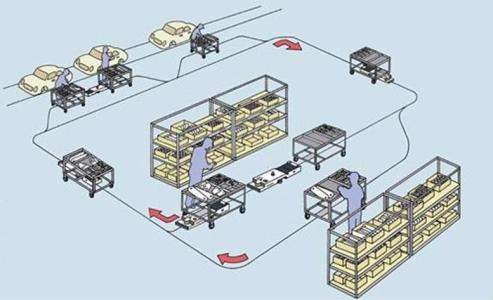
叫料和送料
叫料,生产线上一般有2个位置,一个是下料位和空车位,AGV把满物料的料车放到下料位,然后去空料车的位置拉着料车去仓库上料。需要叫料的时候按下按钮盒按钮,当按钮灯亮时叫料成功。
送料, 在仓库的备料位置,每个仓库有空台车下料位和满台车上料位,把产线上的空台车放下,拉着满物料的台车去产线
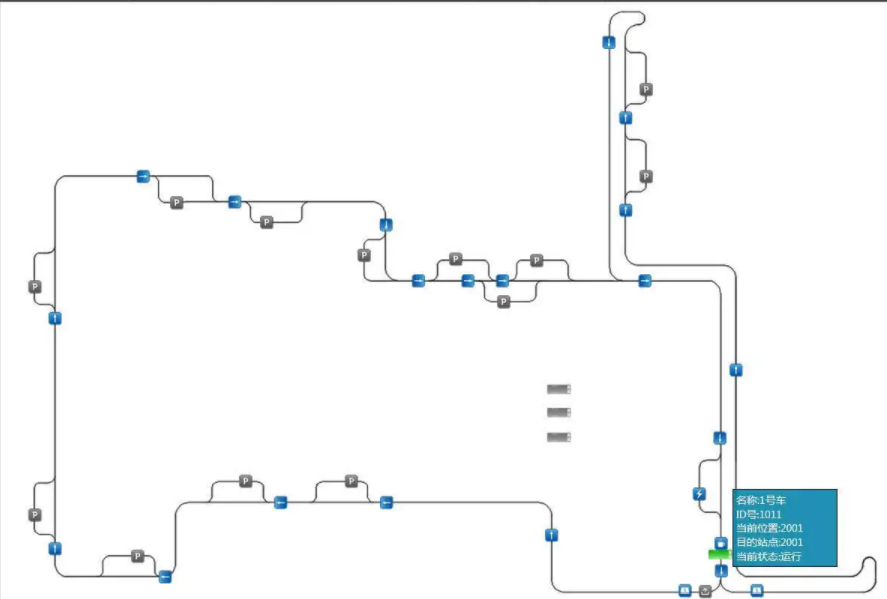
然后根据AGV返回的位置信息上可以看到可以看到AGV当前位置,当前状态(是否有障碍物,是否脱轨,当前是否携带物料等等)。
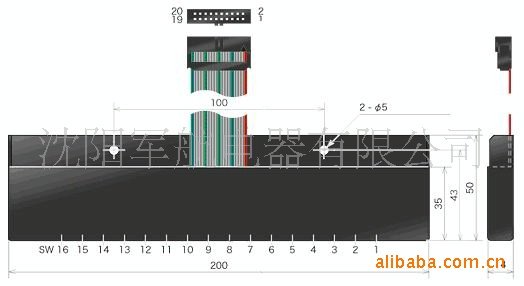
呼叫盒

能源灯,信号发送灯(叫料),送料灯(信息确认)。一般就是有线或者wifi通信。(可以PLC也可以单片机)。
其他
升降门
确保AGV准备经过这个位置时升降门是打开的
行车避让
当AGV会进入交汇区域时,默认AGV停止,然后看区域内是否有AGV,哪台先到达区域哪台先经过,其他的等待。
后期谢谢软件具体如何与硬件通信的。