文章目录
- 前言
- 项目结构
- Sort算法实现
- 卡尔曼跟踪器
- 工具类
- 多目标跟踪器
- 整合
前言
昨天挖了个坑,那么今天的话把坑填上,只要是实现Sort算法和Yolov5-Lite的一个整合。当然先前的话,我们在Yolov3–Tiny的时候,也做了一个,不过当时的话,有几个问题没有解决。第一就是当时以中心点进行预测的,这样做的结果就是如果目标框的波动比较大的话,影响会很大,同时,当时设计是为了应对直线旋转平移这样的运动进行捕捉。所以效果比较差。同时就是对于目标点的匹配不合理。那就是,我是按照,当预测点和识别点进行距离计算,计算当前点的最小距离。在同一个类别之下,但是这里有个问题,就是,假设有一个的A,和点B,C,由于B点先进行计算,那么假设A,B匹配了,当C进来的时候,由于C可能和A点的距离更小,但是由于B,A已经匹配导致C没有和A匹配。那么这样一来明明C是最合适A的,但是由于B先来,导致A和B先匹配了(淦,有点像极了人生)
所以,这里的话,还是要引入匈牙利算法,当然这个算法的话,在先前的算法刷题专栏当中已经说过了,那么这里就不重复了,其实就是简单的应用。
项目结构
这里先说一下,这个项目的基本原理还是类似的:
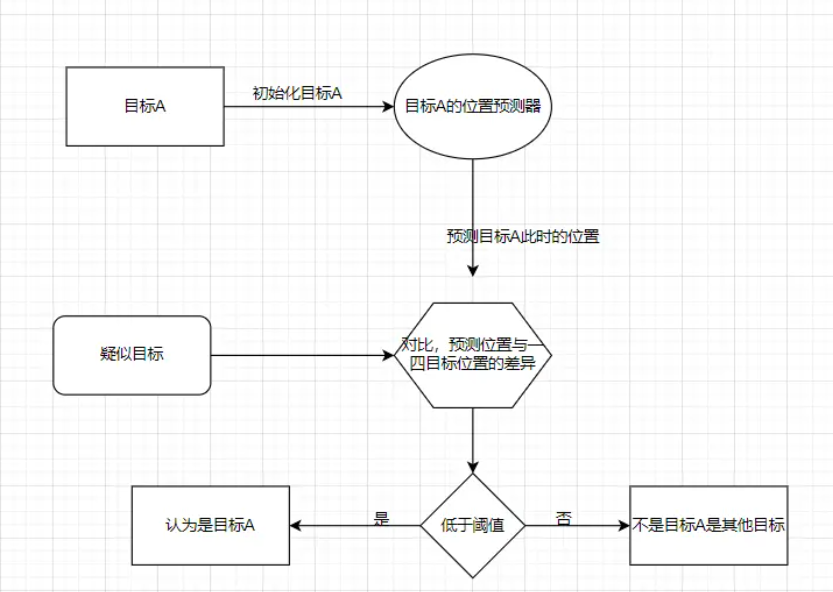
只是,现在匹配我们换成了匈牙利算法。
Sort算法实现
那么,在这里的话,我们先来实现Sort算法。本来是打算嫖个开源的做整合的,但是没想到,他们的代码有很多问题,改别人的bug,还不如自己手写,所以的话,这里的话,我自己手写了一个Sort算法。这里注意的是,Sort算法只是一个匹配算法,通过IOU,和卡尔曼滤波做预测,来匹配当前的跟踪器和新产生的目标框是不是同一个目标。如果你的目标识别算法不准确的话,也就是目标框不稳定,会不断生成新的目标框,那么你的Sort算法就会不断认为这是新的目标的。解决办法的话,可以考虑使用deepsort。 但是的话,我们这里是边缘设备,如果没有deepsort-lite的话实在是不好搞。而且,比如一些简单场景,比如车流量检查,行人检测啥的,机位固定倒也用不上。
卡尔曼跟踪器
那么首先,在这里要实现的就是卡尔曼跟踪器。
这里的话,原理就不扯了,我这里都提到好几次了。
import numpy as np
from filterpy.kalman import KalmanFilter
import cv2
from sort.utils import convert_bbox_to_z, convert_x_to_bbox
np.random.seed(0)@DeprecationWarning
class ObjectTrackerKF:"""这个滤波是只跟踪中心点坐标,不过,还是会还原为[x1,y1,x2,y2]的"""def __init__(self,bbox, dt=1, sigma=10):# 每次创建新的kalman滤波器时,计数ID都会加1self.id = 0self.hit_streak = 0self.bbox = bbox# 自上次未匹配成功,经过的帧数self.time_since_update = 0# 自上次未匹配成功,连续成功匹配的帧数self.hit_streak = 0self.dt = dtx_init, y_init = (bbox[0]+bbox[2])/2 ,(bbox[1]+bbox[3])/2# 状态向量,包含位置和速度信息self.state = np.array([[x_init], [y_init], [0], [0]], np.float32)# 系统矩阵,将状态向量映射为下一时刻的状态向量self.A = np.array([[1, 0, self.dt, 0],[0, 1, 0, self.dt],[0, 0, 1, 0],[0, 0, 0, 1]], np.float32)# 测量矩阵,将状态向量映射为测量向量self.H = np.array([[1, 0, 0, 0],[0, 1, 0, 0]], np.float32)# 过程噪声,表示模型中未考虑的外部因素产生的偏差self.Q = np.array([[self.dt ** 4 / 4, 0, self.dt ** 3 / 2, 0],[0, self.dt ** 4 / 4, 0, self.dt ** 3 / 2],[self.dt ** 3 / 2, 0, self.dt ** 2, 0],[0, 0, 0, self.dt ** 2]], np.float32) * sigma ** 2# 测量噪声,表示测量器的误差self.R = np.array([[1, 0],[0, 1]], np.float32) * sigma ** 2# 卡尔曼滤波器初始化self.kf = cv2.KalmanFilter(4, 2, 0)self.kf.statePost = self.stateself.kf.transitionMatrix = self.Aself.kf.measurementMatrix = self.Hself.kf.processNoiseCov = self.Qself.kf.measurementNoiseCov = self.Rdef predict(self):self.state = self.kf.predict()t = self.state[:2].reshape(-1)t = list(t)w = self.bbox[2] - self.bbox[0]h = self.bbox[3] - self.bbox[1]box = [(t[0]-w/2),t[1]-h/2,t[0]+w/2,t[1]+h/2,self.bbox[4]]self.bbox = boxif self.time_since_update > 0:self.hit_streak = 0return self.bboxdef update(self,bbox):x, y = (bbox[0]+bbox[2])/2 ,(bbox[1]+bbox[3])/2self.time_since_update = 0# 表示连续匹配成功的次数加一if(self.hit_streak<=30):self.hit_streak+=1self.kf.correct(np.array([[x], [y]], np.float32))return self.state[:2].reshape(-1)class KalmanBoxTracker(object):# 利用bounding box初始化Kalman滤波轨迹def __init__(self, bbox):self.id = 0#注意这里的bboxs是[x1,y1,x2,y2,conf]是list类型self.bbox = bbox# 定义恒定速度模型,7个状态变量和4个观测输入self.kf = KalmanFilter(dim_x=7, dim_z=4)# 状态向量 X = [检测框中心的横坐标,检测框中心的纵坐标,检测框的面积,长宽比,横坐标速度,纵坐标速度,面积速度]# SORT假设一个物体在不同帧中检测框的长宽比不变,是个常数,所以速度变化只考虑横坐标、横坐标、检测框面积self.kf.F = np.array([[1, 0, 0, 0, 1, 0, 0],[0, 1, 0, 0, 0, 1, 0],[0, 0, 1, 0, 0, 0, 1],[0, 0, 0, 1, 0, 0, 0],[0, 0, 0, 0, 1, 0, 0],[0, 0, 0, 0, 0, 1, 0],[0, 0, 0, 0, 0, 0, 1]])self.kf.H = np.array([[1, 0, 0, 0, 0, 0, 0],[0, 1, 0, 0, 0, 0, 0],[0, 0, 1, 0, 0, 0, 0],[0, 0, 0, 1, 0, 0, 0]])# R是测量噪声的协方差矩阵,即真实值与测量值差的协方差# R = diagonal([1, 1, 10, 10])self.kf.R[2:, 2:] *= 10.# [[ 1. 0. 0. 0.]# [ 0. 1. 0. 0.]# [ 0. 0. 10. 0.]# [ 0. 0. 0. 10.]]# P是先验估计的协方差,对不可观测的初始速度,给予高度不确定性# P = diagonal([10,10,10,10,1000,1000,1000])self.kf.P[4:, 4:] *= 1000.self.kf.P *= 10.# [[ 10. 0. 0. 0. 0. 0. 0.]# [ 0. 10. 0. 0. 0. 0. 0.]# [ 0. 0. 10. 0. 0. 0. 0.]# [ 0. 0. 0. 10. 0. 0. 0.]# [ 0. 0. 0. 0. 10000. 0. 0.]# [ 0. 0. 0. 0. 0. 10000. 0.]# [ 0. 0. 0. 0. 0. 0. 10000.]]# Q是系统状态变换误差的协方差# Q = diagonal([1, 1, 1, 1, 0.01, 0.01, 0.0001])self.kf.Q[







![[转]魔兽世界私服Trinity,从源码开始](https://img-blog.csdn.net/20160914114928805?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQv/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center)