目录
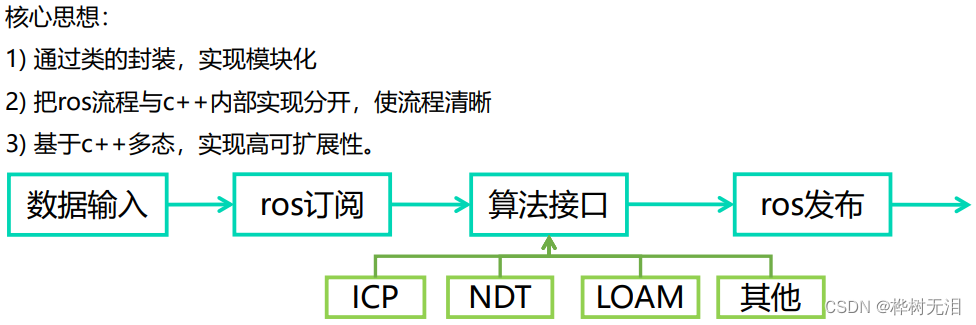
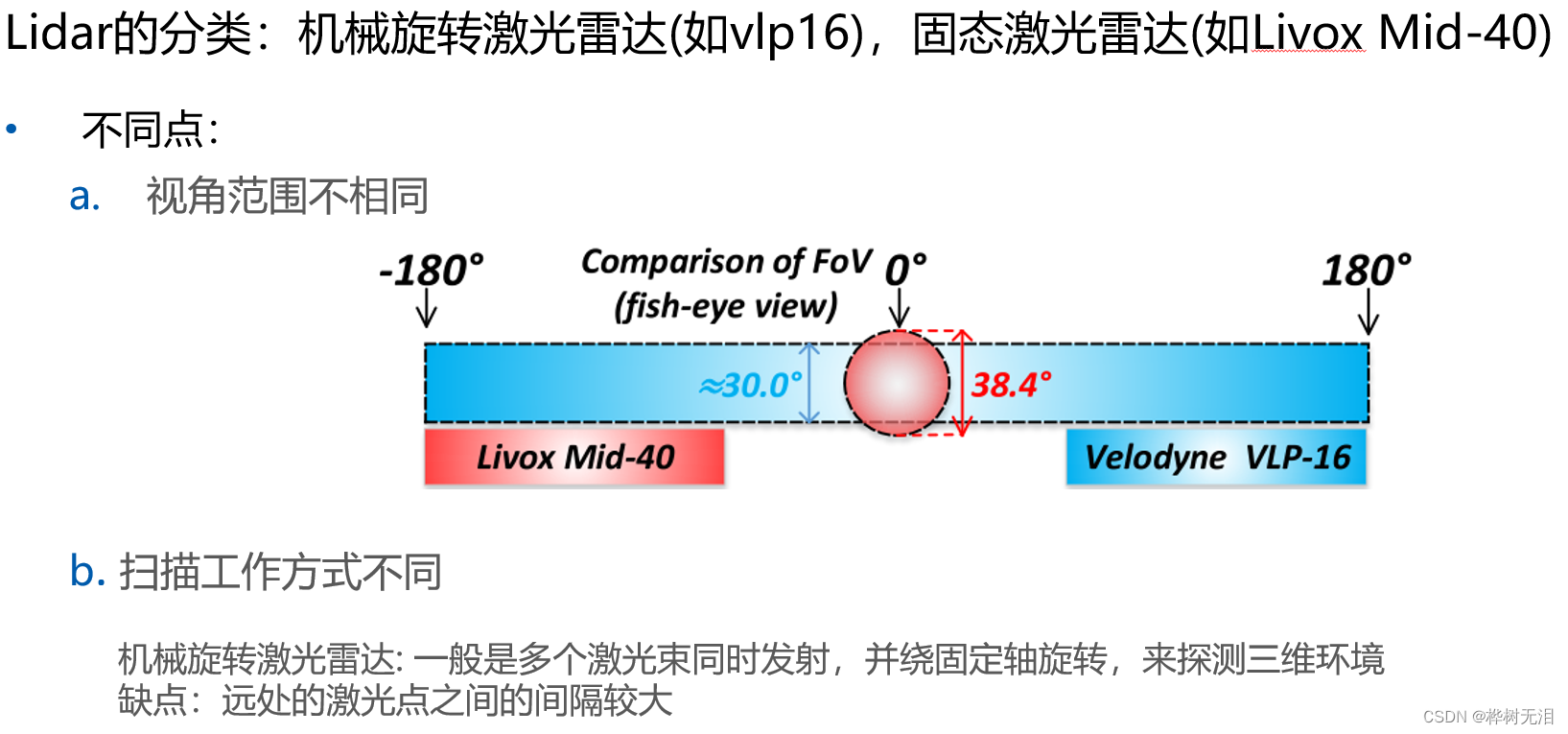
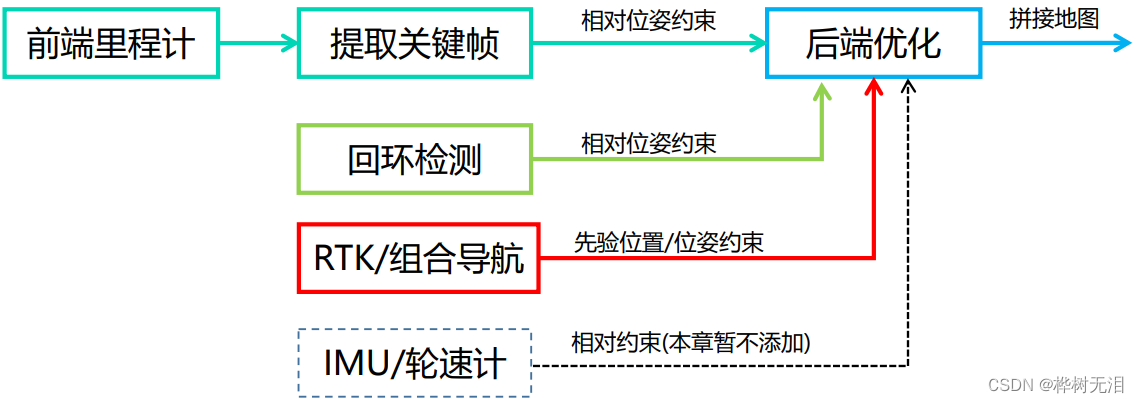
一、点云地图整体流程
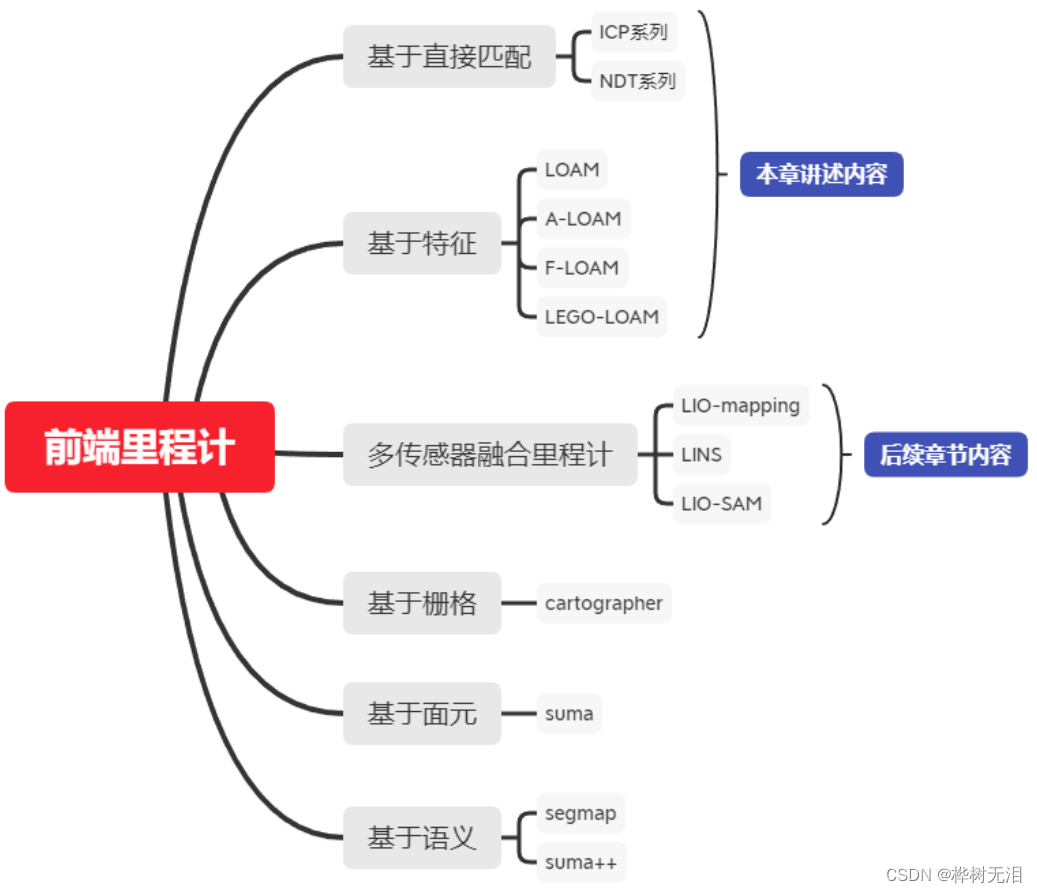
二、激光里程计方案
2.1 ICP点到点
2.1.1 ICP推导
2.1.2 ICP改进
2.2 NDT
2.2.1 NDT推导
2.2.2 NDT改进
2.3 LOAM系
2.3.1 LOAM
2.3.2 A-LOAM
2.3.3 LEGO-LOAM
2.4 数据集及评价指标
2.4.1 KITTI简介
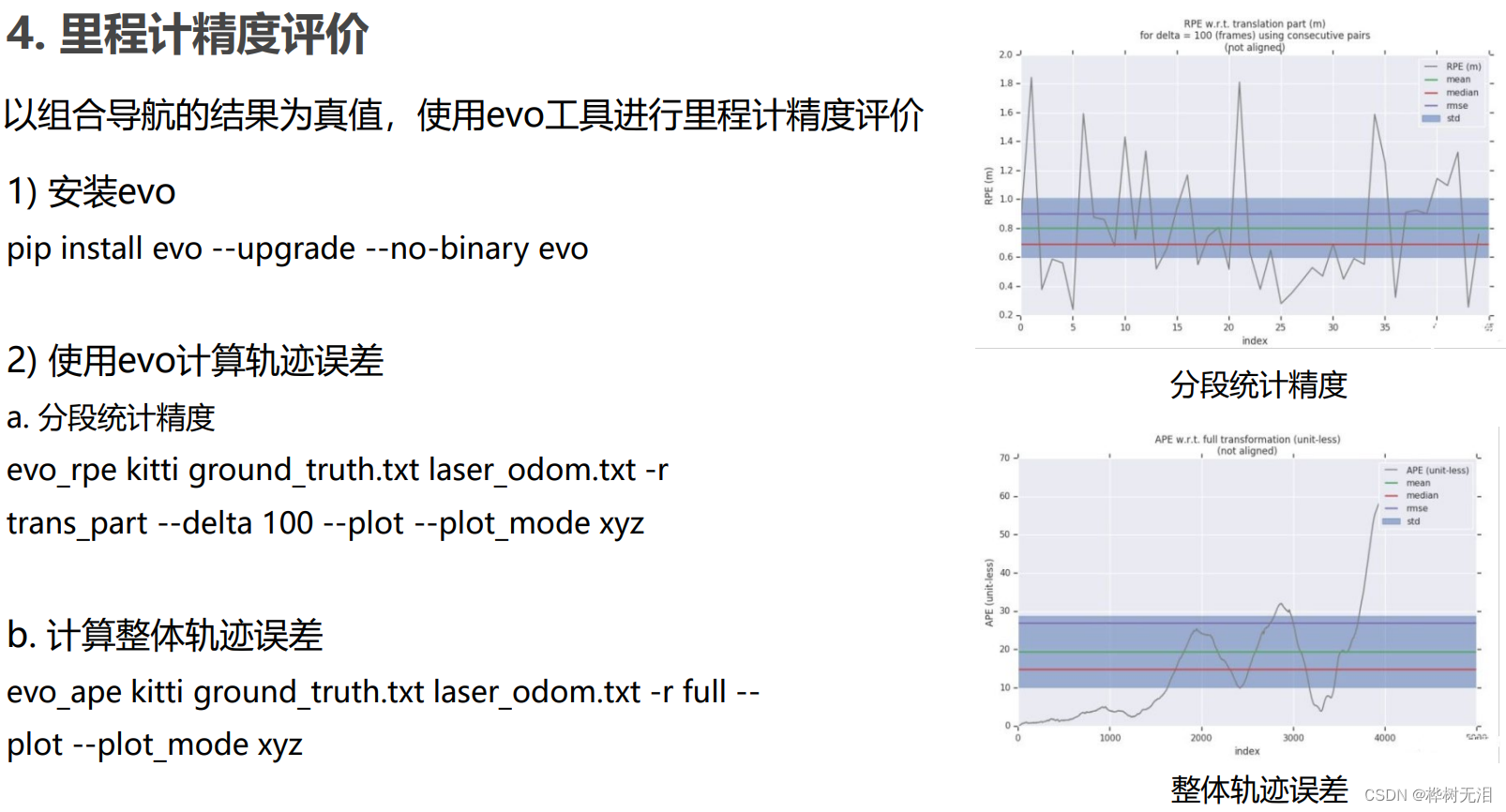
2.4.2 指标
一、点云地图整体流程
二、激光里程计方案
2.1 ICP点到点
要求初始位姿比较好
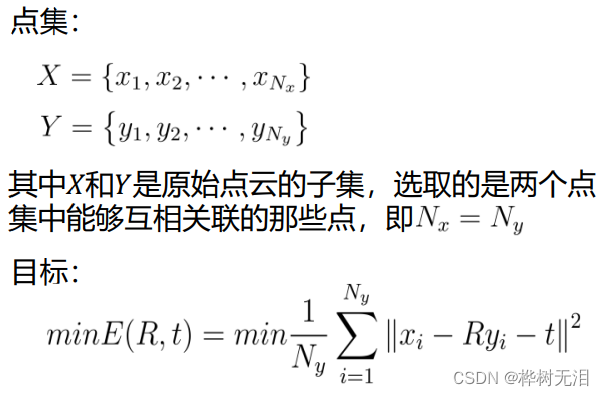
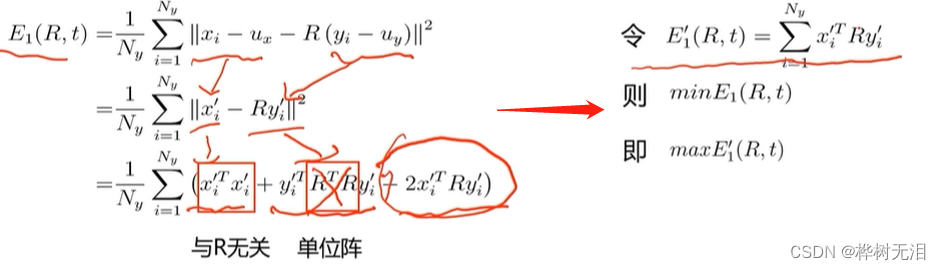
2.1.1 ICP推导
核心思想:将旋转和平移分开求解,先求得旋转再根据旋转求平移得值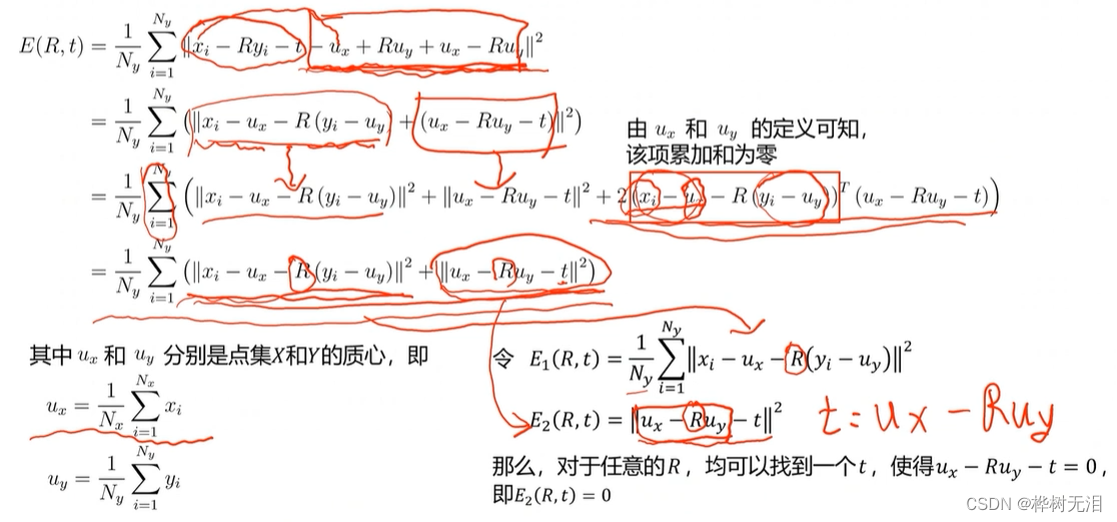
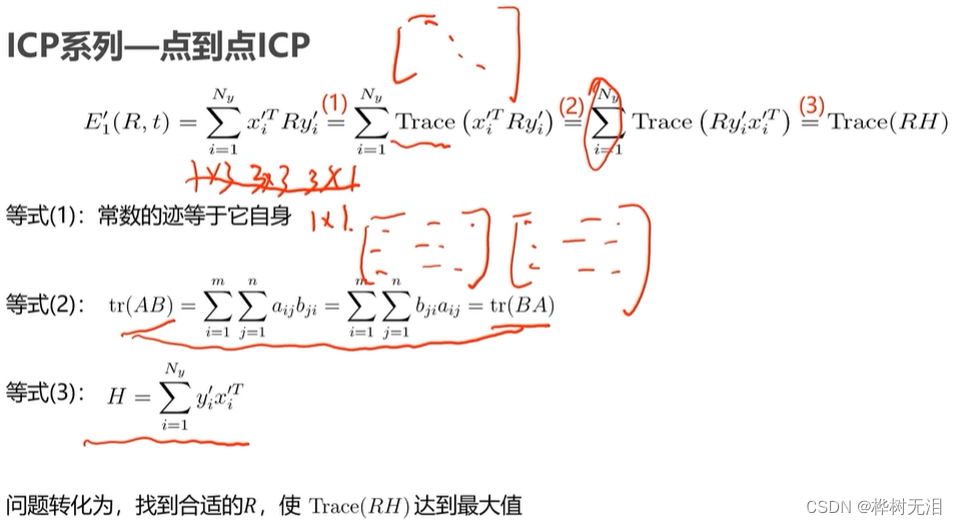
 Trace是对角线的值, 交换相乘顺序,迹不变
Trace是对角线的值, 交换相乘顺序,迹不变
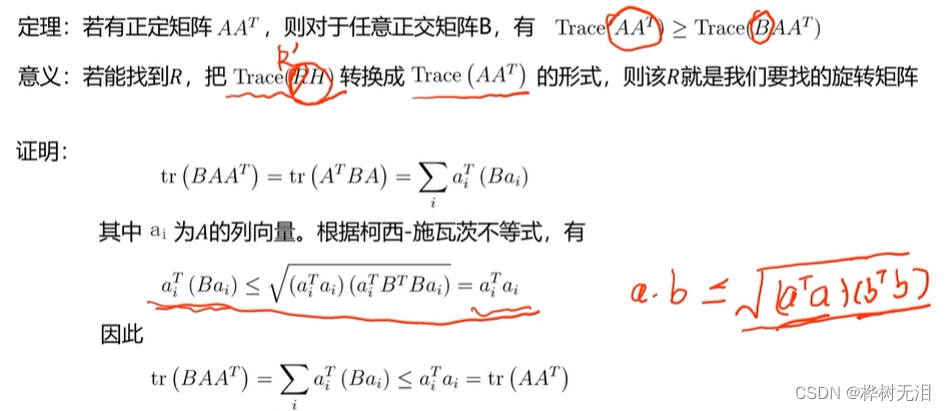
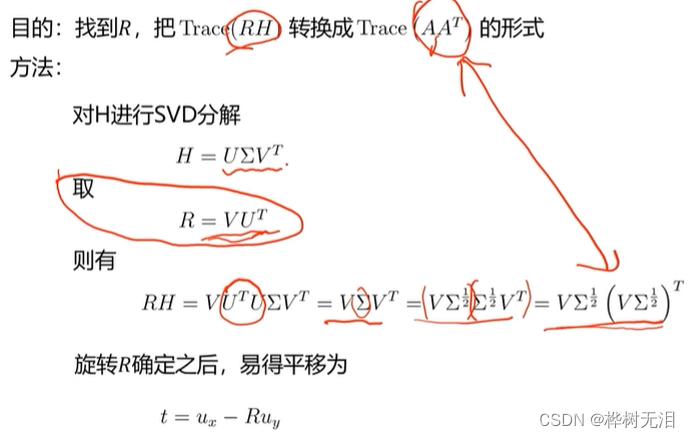
求解出之后,进行迭代
2.1.2 ICP改进
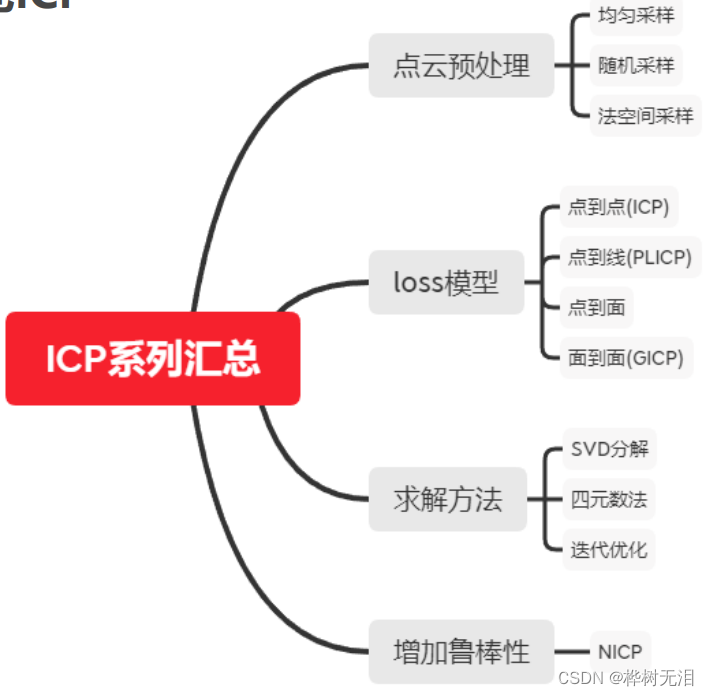
ICP是一个假设模型,点到点本身就是模糊求解,一堆点云打到同一个地方不可能完全重合。
2.2 NDT
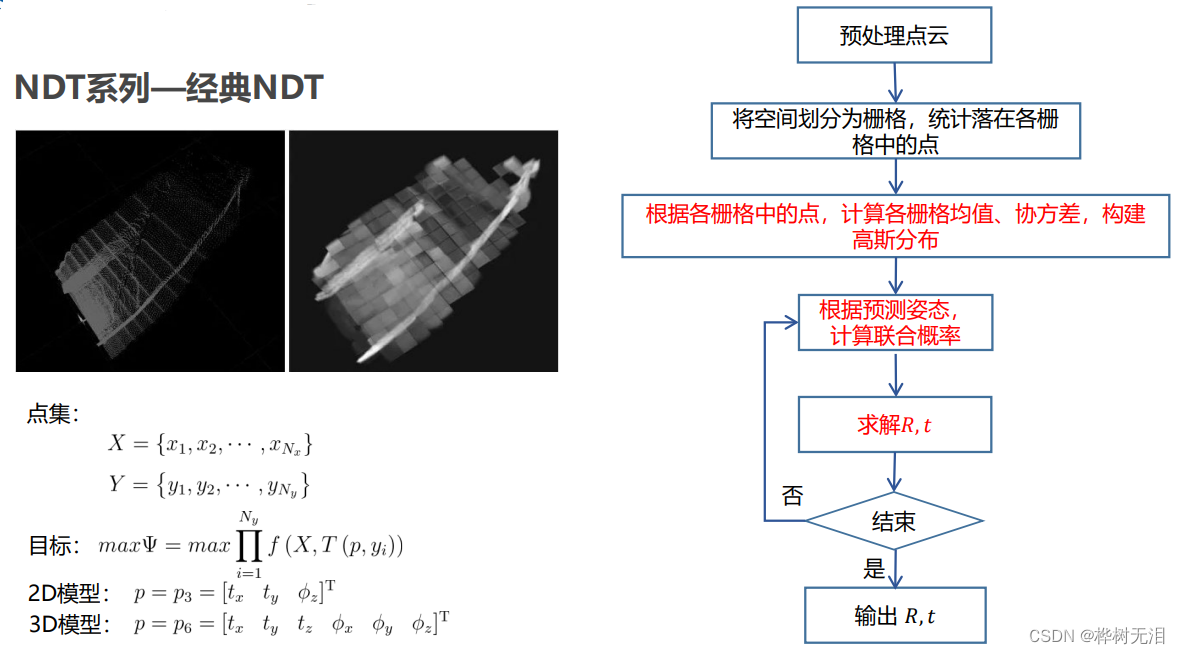
NDT计算的是两个点云的每个栅格内分布和分布之间得差异,鲁棒性高
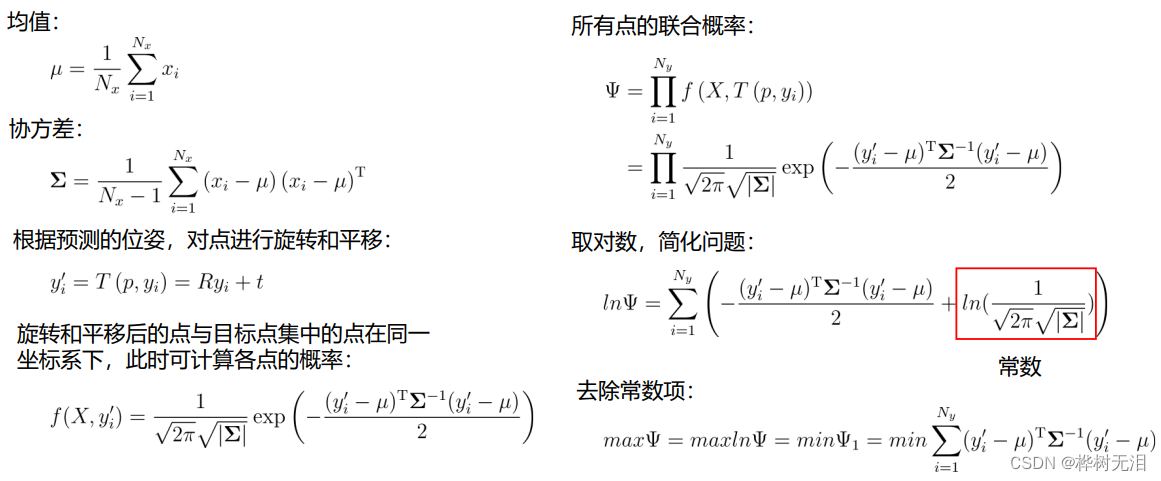
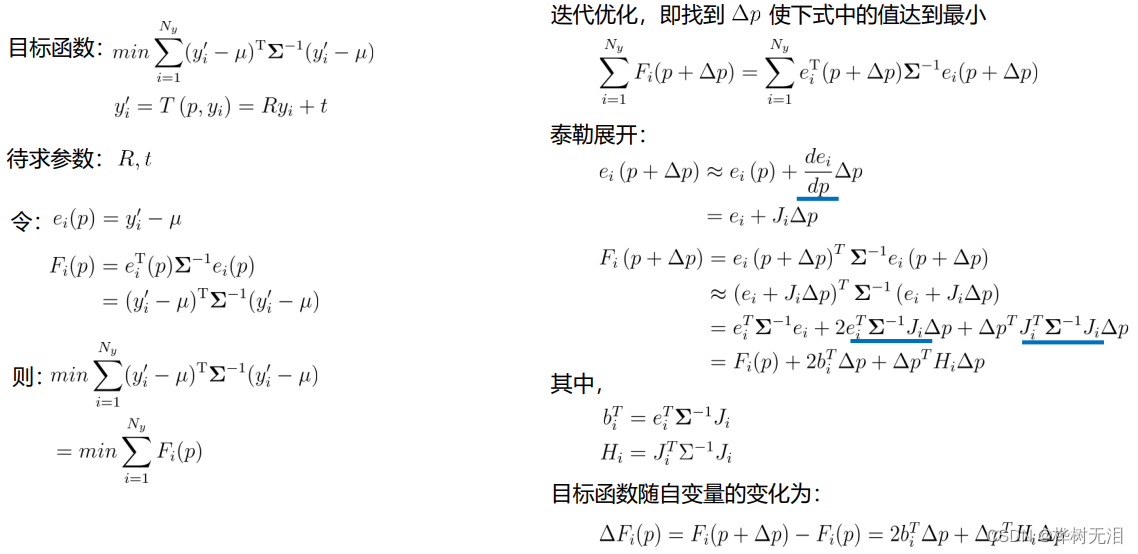
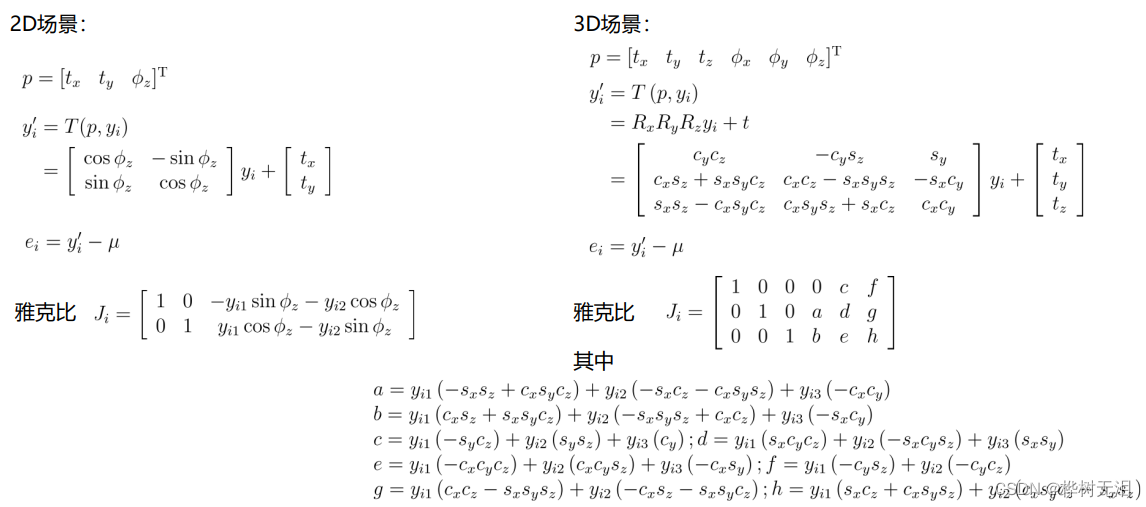
2.2.1 NDT推导
只需要计算第一个点云的特征分布,而不需要每次迭代都计算一下第二个点云,只需要计算第二个点云在第一个点云栅格的概率最大。

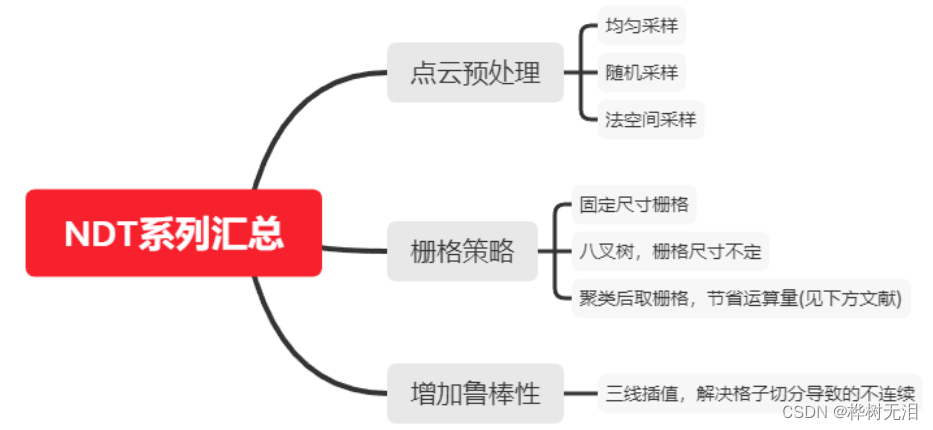
2.2.2 NDT改进
2.3 LOAM系
2.3.1 LOAM
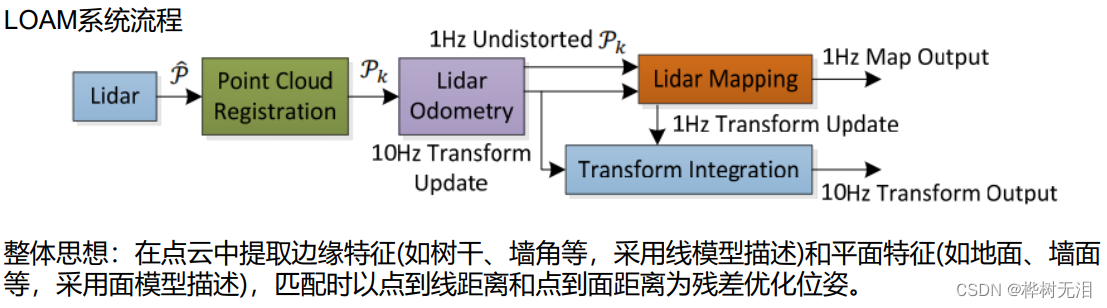
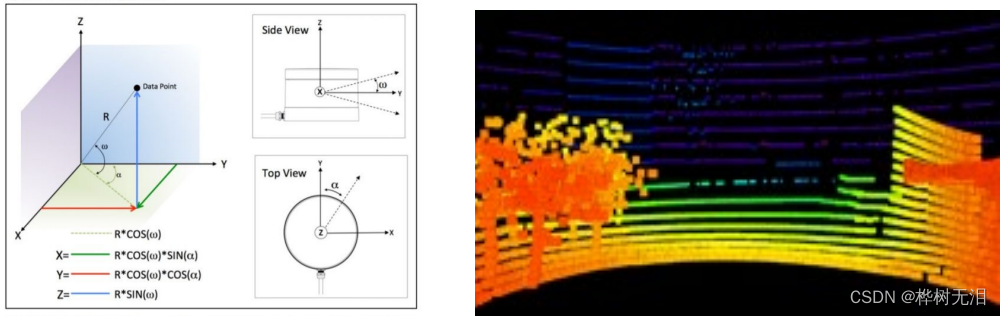
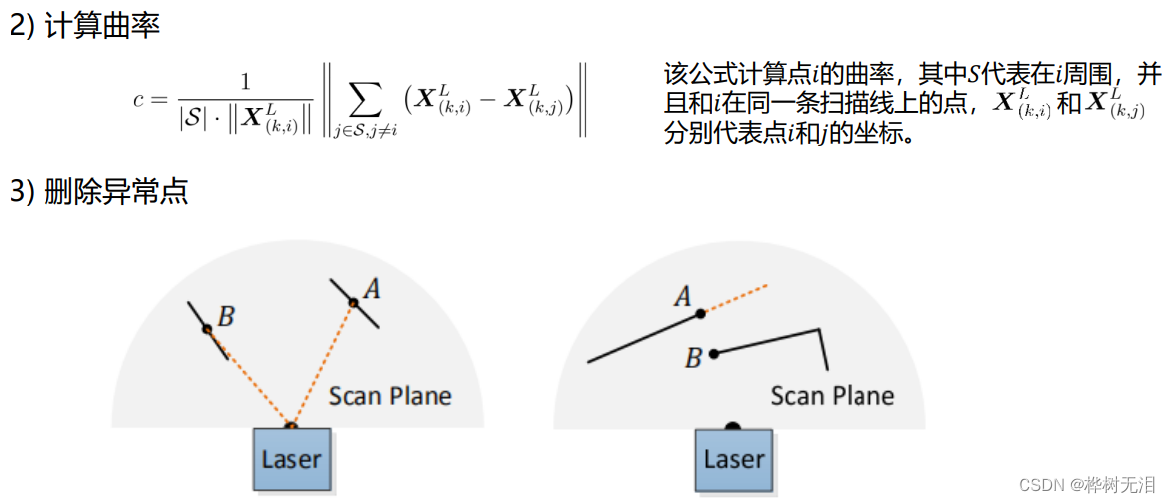
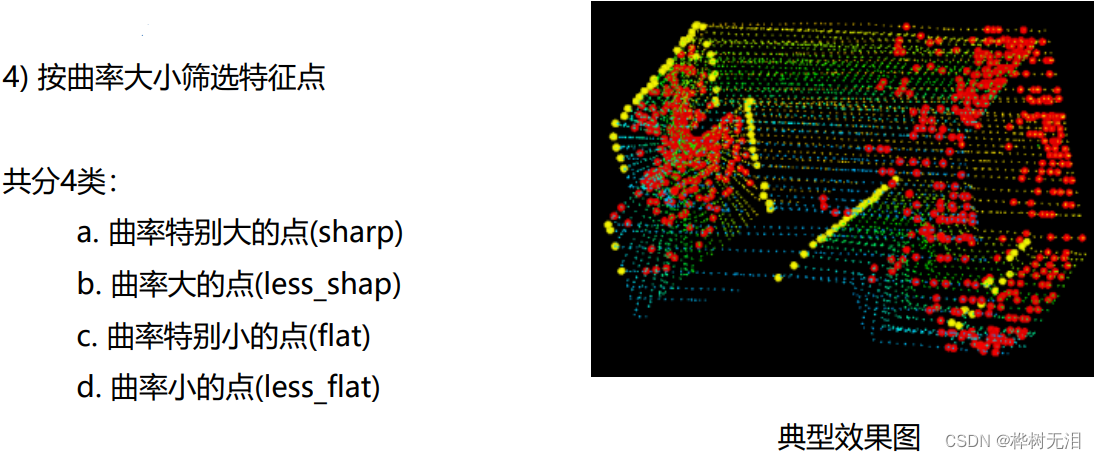
1、提取特征
1)按线束分割
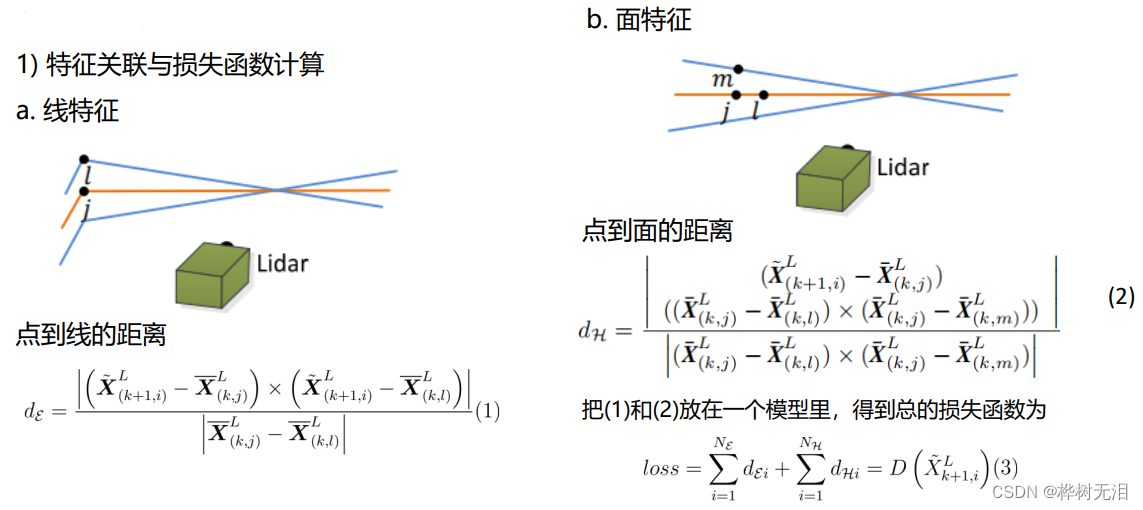
2、帧间匹配
1)定义点到线,点到面之间的距离
 2)寻找与Rt的联系
2)寻找与Rt的联系
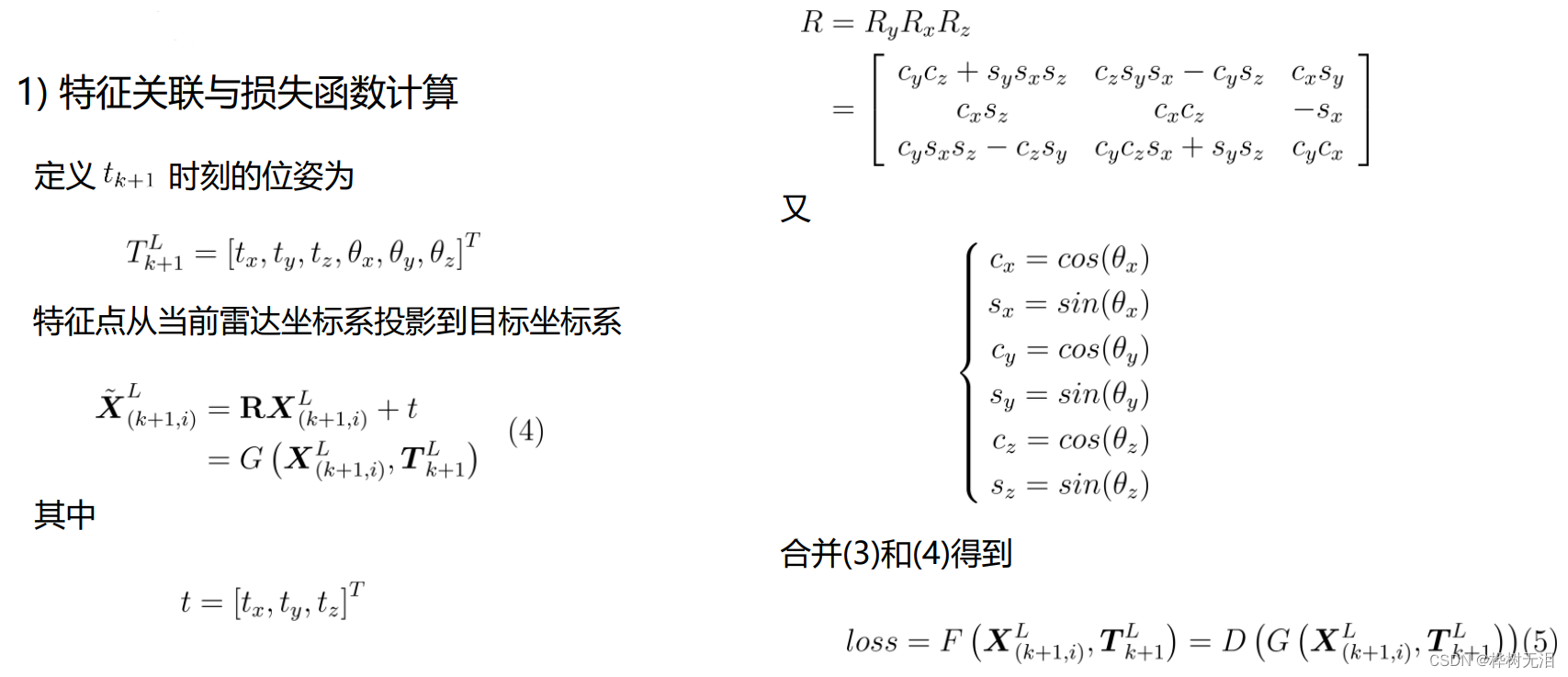 最完美的情况是经过旋转平移,点在线上,点在面上。
最完美的情况是经过旋转平移,点在线上,点在面上。
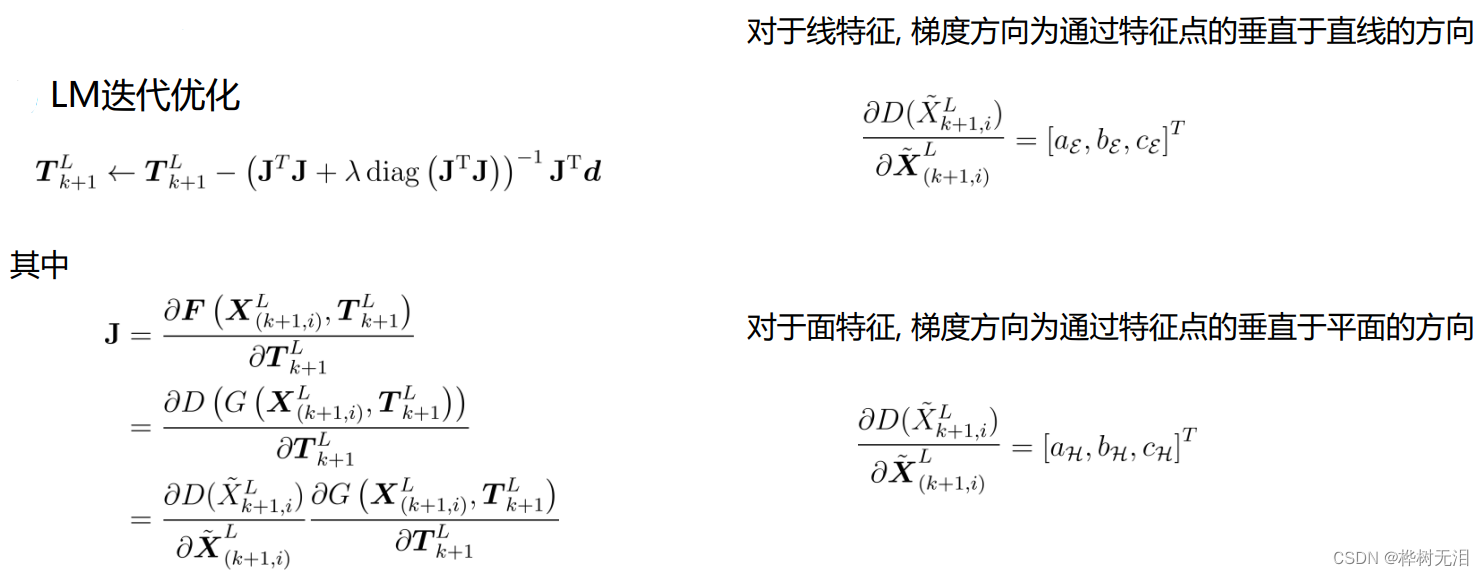
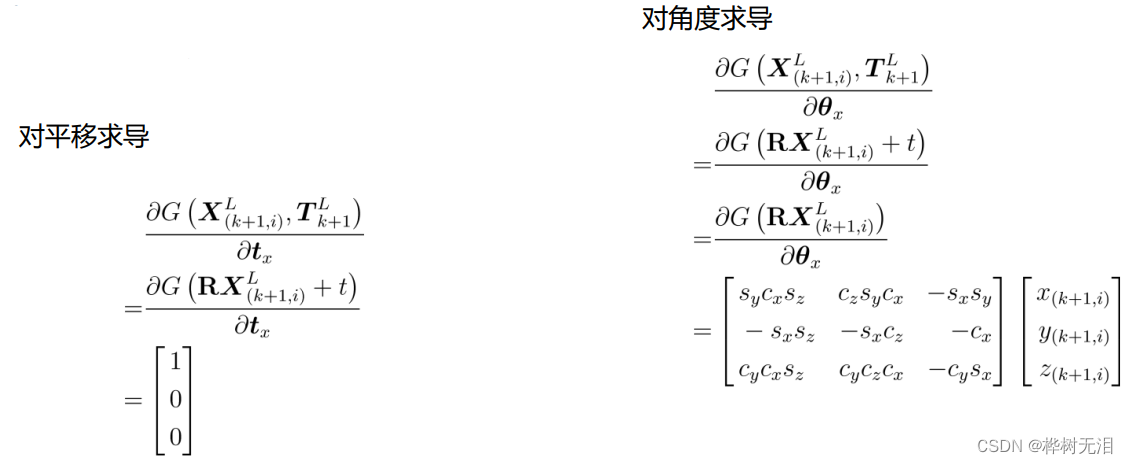
3)LM优化
 3、合并地图点
3、合并地图点
2.3.2 A-LOAM
F-LOAM

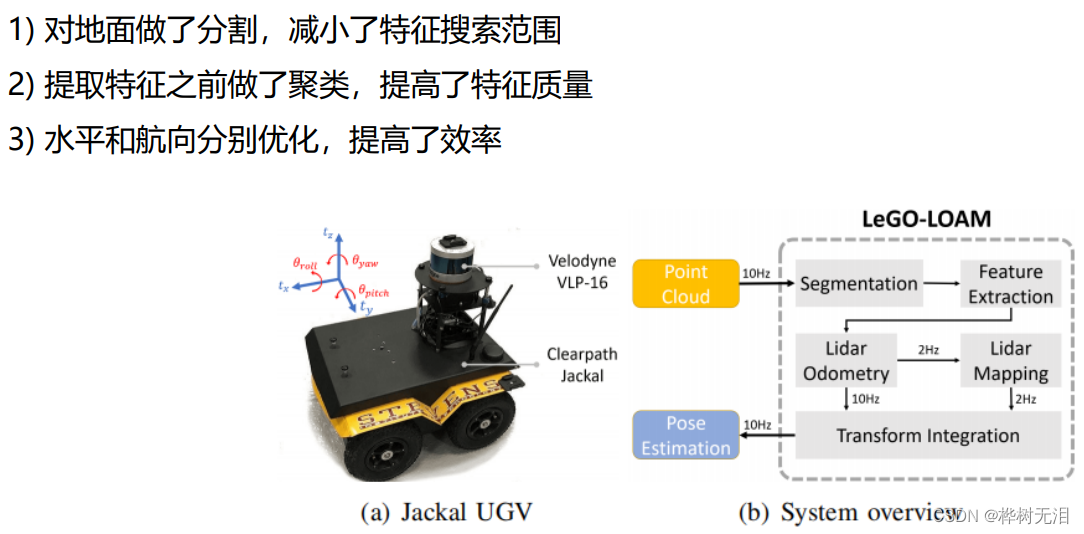
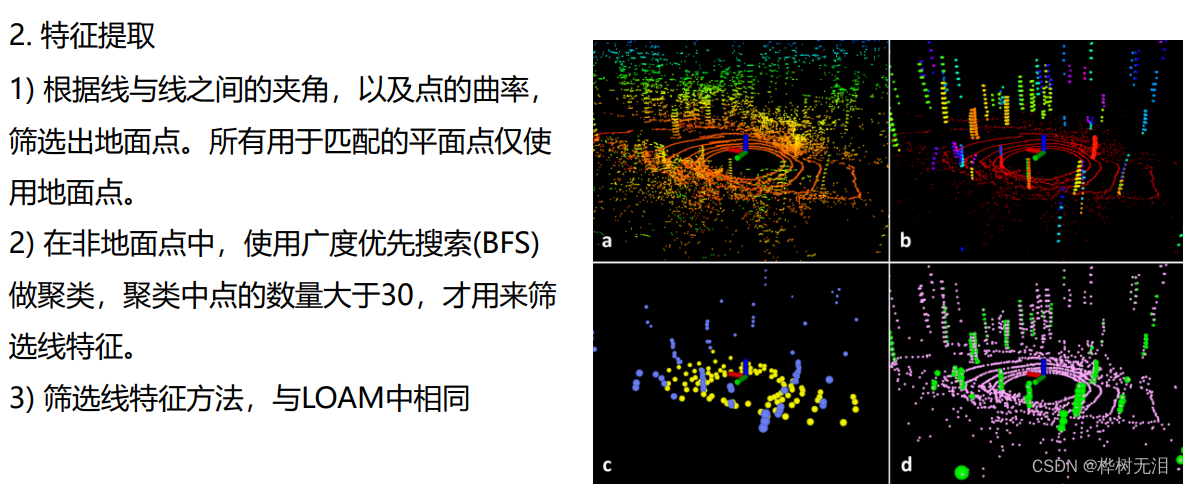
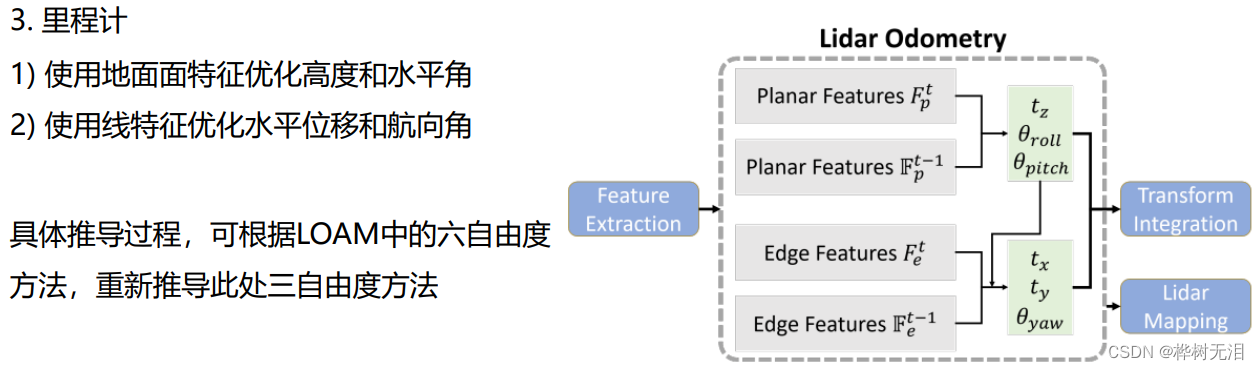
2.3.3 LEGO-LOAM
2.4 数据集及评价指标
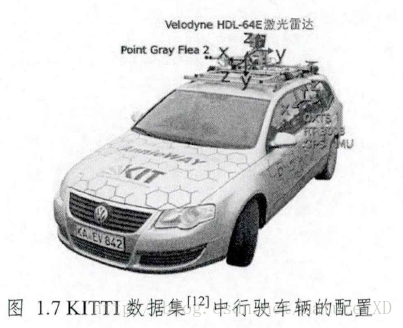
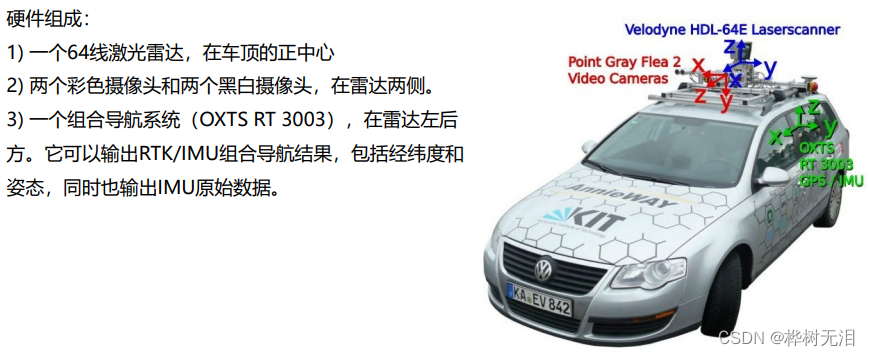
2.4.1 KITTI简介
2.4.2 指标