CS出身的本菜鸡,由于硕士研究方向为射频指纹(radio frequency fingerprint),最近在恶补杨学志老师的《通信之道》,数学上遇到很多问题。本篇博客主要是对于书中9.3节相干解调中涉及到的公式的推导。
文章目录
- 1. 相干解调基本公式
- 2. 公式(2)的推导
- 2.1 基本思路
- 2.2 关于狄拉克函数 δ
- 3. 公式(3)的推导
1. 相干解调基本公式
对于一个一般性的基带信号 s ( t ) s(t) s(t),假设其频谱为
S ( w ) = F { s ( t ) } (1) S(w)=\mathscr{F}\{s(t)\} \tag{1} S(w)=F{s(t)}(1)
载波的频谱为
F { cos ( w c t ) } = π δ ( w − w c ) + π δ ( w + w c ) (2) \mathscr{F}\{\cos(w_ct)\}=\pi\delta(w-w_c)+\pi\delta(w+w_c) \tag{2} F{cos(wct)}=πδ(w−wc)+πδ(w+wc)(2)
则通过调制,将低频信号 s ( t ) s(t) s(t) 乘以一个高频信号 c o s ( w c t ) cos(w_ct) cos(wct) 得到已调信号,其频谱为
S R F ( w ) = F { s ( t ) cos w c t } = 1 2 π S ( w ) ∗ [ π δ ( w − w c ) + π δ ( w + w c ) ] = 1 2 [ S ( w − w c ) + S ( w + w c ) ] (3) \begin{aligned} S_{RF}(w) = & \, \mathscr{F}\{s(t)\cos{w_ct}\} \\ = & \, \frac{1}{2\pi}S(w)*[\pi\delta(w-w_c)+\pi\delta(w+w_c)] \\ = & \, \frac{1}{2}[S(w-w_c)+S(w+w_c)] \end{aligned} \tag{3} SRF(w)===F{s(t)coswct}2π1S(w)∗[πδ(w−wc)+πδ(w+wc)]21[S(w−wc)+S(w+wc)](3)
2. 公式(2)的推导
2.1 基本思路
以下是公式推导部分:
公式 ( 2 ) (2) (2) 的推导如下:
cos ( w c t ) = e j w c t + e − j w c t 2 (4) \cos(w_ct)=\frac{e^{jw_ct}+e^{-jw_ct}}{2}\tag{4} cos(wct)=2ejwct+e−jwct(4)
F { e j w 0 t } = 2 π δ ( w − w 0 ) (5) \mathscr{F}\{e^{jw_0t}\}=2\pi\delta(w-w_0)\tag{5} F{ejw0t}=2πδ(w−w0)(5)
F { cos ( w c t ) } = 1 2 F { e j w c t } + 1 2 F { e − j w c t } = π δ ( w − w c ) + π δ ( w + w c ) (6) \begin{aligned} \mathscr{F}\{\cos(w_ct)\} = & \, \frac{1}{2}\mathscr{F}\{e^{jw_ct}\}+\frac{1}{2}\mathscr{F}\{e^{-jw_ct}\} \\ = & \, \pi\delta(w-w_c)+\pi\delta(w+w_c) \end{aligned} \tag{6} F{cos(wct)}==21F{ejwct}+21F{e−jwct}πδ(w−wc)+πδ(w+wc)(6)
其中, ( 5 ) (5) (5) 的推导可以直接推出或者利用傅里叶逆变换推出:
【傅里叶逆变换】
F − 1 { F { e j w 0 t } } = F − 1 { 2 π δ ( w − w 0 ) } = 1 2 π ∫ − ∞ ∞ 2 π δ ( w − w 0 ) e j w t d t = e j w 0 t \begin{aligned} \mathscr{F^{-1}}\{{\mathscr{F}\{e^{jw_0t}\}\}}= & \mathscr{F^{-1}}\{2\pi\delta(w-w_0)\} \\ =& \frac{1}{2\pi}\int_{-\infty}^{\infty}2\pi\delta(w-w_0)e^{jwt}dt \\ =& e^{jw_0t} \end{aligned} F−1{F{ejw0t}}===F−1{2πδ(w−w0)}2π1∫−∞∞2πδ(w−w0)ejwtdtejw0t
【直接证明】
F { e j w 0 t } = ∫ − ∞ ∞ e j w 0 t e − j w t d t = ∫ − ∞ ∞ e j ( w 0 − w ) t d t = l i m γ → ∞ ∫ − γ γ e j ( w 0 − w ) t d t = l i m γ → ∞ 1 j ( w 0 − w ) ⋅ e j ( w 0 − w ) t ∣ − γ γ = l i m γ → ∞ 1 j ( w 0 − w ) ⋅ 2 j sin [ ( w 0 − w ) γ ] = 2 π l i m γ → ∞ γ π ⋅ sin [ ( w 0 − w ) γ ] ( w 0 − w ) γ = 2 π δ ( w 0 − w ) (7) \begin{aligned} \mathscr{F}\{e^{jw_0t}\} = & \int_{-\infty}^{\infty}e^{jw_0t}e^{-jwt}dt \\ =& \int_{-\infty}^{\infty}e^{j(w_0-w)t}dt \\ =& \underset{\gamma\rightarrow\infty}{lim}\int_{-\gamma}^{\gamma}e^{j(w_0-w)t}dt \\ =& \underset{\gamma\rightarrow\infty}{lim}\frac{1}{j(w_0-w)}\cdot e^{j(w_0-w)t}|_{-\gamma}^{\gamma} \\ =& \underset{\gamma\rightarrow\infty}{lim}\frac{1}{j(w_0-w)}\cdot2j\sin[(w_0-w)\gamma]\\ =& 2\pi\underset{\gamma\rightarrow\infty}{lim} \frac{\gamma}{\pi} \cdot \frac{\sin[(w_0-w)\gamma]}{(w_0-w)\gamma}\\ =& 2\pi\delta(w_0-w) \end{aligned} \tag{7} F{ejw0t}=======∫−∞∞ejw0te−jwtdt∫−∞∞ej(w0−w)tdtγ→∞lim∫−γγej(w0−w)tdtγ→∞limj(w0−w)1⋅ej(w0−w)t∣−γγγ→∞limj(w0−w)1⋅2jsin[(w0−w)γ]2πγ→∞limπγ⋅(w0−w)γsin[(w0−w)γ]2πδ(w0−w)(7)
2.2 关于狄拉克函数 δ
这里对 ( 7 ) (7) (7) 中最后一步的公式做一些说明:
δ ( x ) = l i m ϵ → 0 s i n ( x ϵ ) π x (8) \delta(x)=\underset{\epsilon\rightarrow0}{lim}\frac{sin(\frac{x}{\epsilon})}{\pi x}\tag{8} δ(x)=ϵ→0limπxsin(ϵx)(8)
维基百科中对于 δ ( x ) \delta(x) δ(x) 做了如下的概括:
In mathematics, the Dirac delta function (δ function), also known as the unit impulse symbol, is a generalized function or distribution over the real numbers, whose value is zero everywhere except at zero, and whose integral over the entire real line is equal to one.
The current understanding of the impulse is as a linear functional that maps every function to its value at zero, or as the weak limit of a sequence of bump functions, which are zero over most of the real line, with a tall spike at the origin. Bump functions are thus sometimes called “approximate” or “nascent” delta functions.
在信号与系统中,狄拉克函数 δ \delta δ,也叫做“冲激函数”。其定义如下:
{ ∫ − ∞ ∞ δ ( t ) d t = 1 δ ( t ) = 0 , t ≠ 0 (9) \left\{ \begin{aligned} \int_{-\infty}^\infty \delta(t)dt=1 \\ \delta(t)=0,t\neq0 \\ \end{aligned} \right. \tag{9} ⎩⎪⎨⎪⎧∫−∞∞δ(t)dt=1δ(t)=0,t=0(9)
即狄拉克函数零点的值为无穷,其他点的值均位0,而在无穷时间上的积分为1。狄拉克函数即冲激信号的数学表达形式,冲激信号在实际中并不存在,但其数学意义很重要,且在信号分析领域占据举足轻重的地位。
由维基百科中给出的对狄拉克函数的理解,有:
1)将每个函数映射至其零点的值,在信号处理中其具有信号抽样的特性,如
∫ − ∞ ∞ x ( t ) δ ( t − t 0 ) d t = ∫ − ∞ ∞ x ( t 0 ) δ ( t − t 0 ) d t = x ( t 0 ) (10) \int_{-\infty}^{\infty}x(t)\delta(t-t_0)dt=\int_{-\infty}^{\infty}x(t_0)\delta(t-t_0)dt=x(t_0)\tag{10} ∫−∞∞x(t)δ(t−t0)dt=∫−∞∞x(t0)δ(t−t0)dt=x(t0)(10)
将上式做变量替换,可得
x ( t ) = ∫ − ∞ ∞ x ( τ ) δ ( t − τ ) d τ (11) x(t)=\int_{-\infty}^{\infty}x(\tau)\delta(t-\tau)d\tau\tag{11} x(t)=∫−∞∞x(τ)δ(t−τ)dτ(11)
即任何一个函数 x ( t ) x(t) x(t),都可以写成一系列不同时移的冲激函数 δ ( t − τ ) \delta(t-\tau) δ(t−τ)的加权和的形式。
2)一系列凸函数的弱极限。(关于这里,我也不是很理解弱极限这种说法,我理解的是狄拉克函数可以由一系列凸函数逼近,即狄拉克函数是这些凸函数某种极限下的状态。)
狄拉克函数可以用凸函数的极限去逼近,这里列出了14个符合条件的凸函数,即 bump functions 或 “nascent” delta functions ,其中公式 ( 8 ) (8) (8) 的情况也被列在其中。
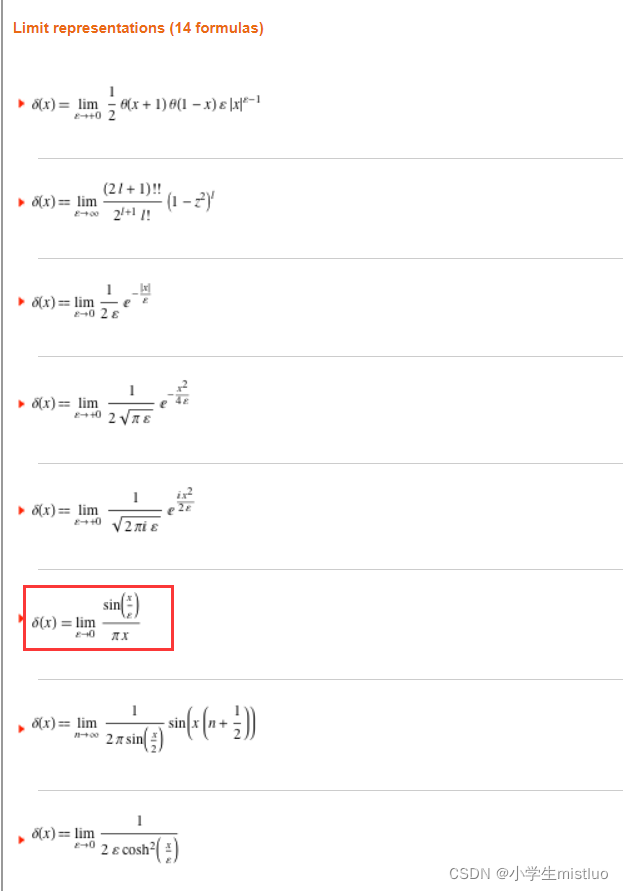
通过参考[1] Dirac delta function as a limit of sinc function 与 [2] Can the Dirac delta “function” be formally defined as the limit of a sequence of functions? If so, how? 以及 [3] Transition probability derivation: How to prove limα→∞sin2αxαx2 = πδ(x)?,下面是我对公式 ( 8 ) (8) (8) 证明思路的理解(注:以上三条链接中多涉及拓扑学、紧空间(compact space)等概念,本人不能完全理解,故以下仅为证明思路或定性角度的考虑,不能作为严格的数学证明):
上面提到,狄拉克函数可以写作一系列凸函数极限下的逼近,这些凸函数也成为 bump functions 或 “nascent” delta functions。我们这里公式 ( 8 ) (8) (8) 就是其中一种,所以上述的三个链接中也大多围绕证明 公式 ( 8 ) (8) (8) 为 nascent delta function。
链接[3] 中提供的思路为:
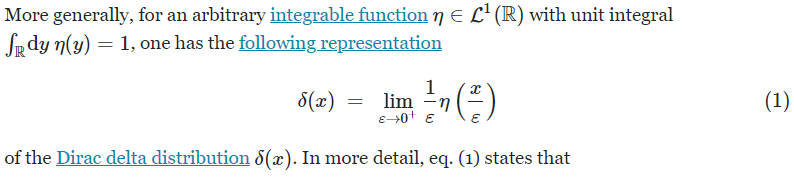
这里超链接 following representation 的内容为维基百科下的解释,如下:

即,想要证明 s i n ( x ϵ ) π x \frac{sin(\frac{x}{\epsilon})}{\pi x} πxsin(ϵx)是nascent delta function,一要证明在实数范围内积分为1,二要证明满足下式条件:
lim ε → 0 + ∫ − ∞ ∞ sin ( x ε ) π x f ( x ) d x = f ( 0 ) (12) \lim_{\varepsilon \to 0^+} \int_{-\infty}^\infty \frac{\sin \left ( \frac{x}{\varepsilon} \right )}{\pi x} f(x) dx = f(0) \tag{12} ε→0+lim∫−∞∞πxsin(εx)f(x)dx=f(0)(12)
对于这两个条件的证明,链接[1] 中有提到,将 公式 ( 8 ) (8) (8) 写作下面的形式:
g ε ( x ) ≡ sin ( x ε ) π x = 1 ε sin ( x ε ) π x ε . (13) g_\varepsilon(x) \equiv \frac{\sin \left ( \frac{x}{\varepsilon} \right )}{\pi x} = \frac{1}{\varepsilon} \frac{\sin \left ( \frac{x}{\varepsilon} \right )}{\pi \frac{x}{\varepsilon}}.\tag{13} gε(x)≡πxsin(εx)=ε1πεxsin(εx).(13)
由于 ∫ − ∞ ∞ sin ( x ) x d x = π \int_{-\infty}^{\infty}\frac{\sin(x)}{x}dx=\pi ∫−∞∞xsin(x)dx=π (证明方式很多), ∫ − ∞ ∞ g ε ( x ) d x = 1 \int_{-\infty}^{\infty}g_\varepsilon(x)dx=1 ∫−∞∞gε(x)dx=1,条件一得证;剩下去证明 公式 ( 12 ) (12) (12) 即可,首先需要证明下面的公式:
lim ε → 0 + ∫ K ∖ ( − δ , δ ) g ε ( x ) d x = 0. (14) \lim_{\varepsilon \to 0^+} \int_{K \setminus (-\delta,\delta)} g_\varepsilon(x) dx = 0.\tag{14} ε→0+lim∫K∖(−δ,δ)gε(x)dx=0.(14)
这里对于 公式 ( 14 ) (14) (14) 中 δ \delta δ 和 ε \varepsilon ε 的取值,链接[1] 中说的很暧昧,用 链接[2] 中的内容作为补充:
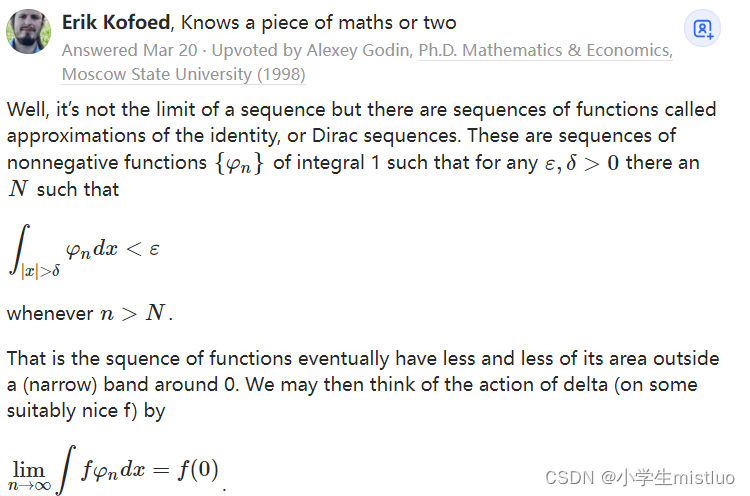
其中,链接[2] 中第二个公式表达的含义即为 公式 ( 12 ) (12) (12)。
关于 公式 ( 14 ) (14) (14) 的证明,链接[1] 中的高赞并没有给出证明,第二个回答中给出了证明的渠道,如下:

这里涉及到黎曼-勒贝格定理,本人水平有限,对此暂时不理解。
链接[1] 给出的思路的最后,关于 公式 ( 12 ) (12) (12) 的证明,它给出了一种定性的思路,将式中的 f ( x ) f(x) f(x) 特殊化为傅里叶变换。
对于某一特定的indicator function 如
{ 1 , x ∈ [ − ε , ε ] 0 , x ∈ ( − ∞ , − ε ) ∪ ( ε , ∞ ) (15) \left\{ \begin{aligned} 1 &, x\in[-\varepsilon, \varepsilon]\\ 0 &, x\in(-\infty,-\varepsilon)\cup(\varepsilon,\infty) \\ \end{aligned} \right. \tag{15} {10,x∈[−ε,ε],x∈(−∞,−ε)∪(ε,∞)(15)
的傅里叶变换为sinc函数,1的傅里叶变换为 δ \delta δ 函数。随着 ε \varepsilon ε 的减小并逐渐向0逼近,indicator function 也收敛至常数1,于是对应的傅里叶变换也收敛为 δ \delta δ 函数。在这一特殊情况下,公式 ( 12 ) (12) (12) 被证明是可行的,但是 f ( x ) f(x) f(x) 应当适用于连续的或平滑的全体函数,因此这只能作为一种思路,并不具备证明的严谨性。
3. 公式(3)的推导
S R F ( w ) = F { s ( t ) cos w c t } = 1 2 F { s ( t ) e j w c t } + 1 2 F { s ( t ) e − j w c t } = 1 2 [ S ( w − w c ) + S ( w + w c ) ] (16) \begin{aligned} S_{RF}(w) = & \, \mathscr{F}\{s(t)\cos{w_ct}\} \\ = & \, \frac{1}{2}\mathscr{F}\{s(t)e^{jw_ct}\}+\frac{1}{2}\mathscr{F}\{s(t)e^{-jw_ct}\} \\ = & \, \frac{1}{2}[S(w-w_c)+S(w+w_c)] \end{aligned} \tag{16} SRF(w)===F{s(t)coswct}21F{s(t)ejwct}+21F{s(t)e−jwct}21[S(w−wc)+S(w+wc)](16)
这里主要用到了欧拉公式和傅里叶变换的频移特性。



![[MODIS数据处理#0]下个数据能再简单些吗?](https://img-blog.csdnimg.cn/2019082021283236.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzM3OTQ4ODY2,size_16,color_FFFFFF,t_70)

![[MODIS数据处理#4]例一:基于MOD13分析某区域逐月NDVI变化](https://img-blog.csdnimg.cn/20190827134756190.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzM3OTQ4ODY2,size_16,color_FFFFFF,t_70)