【小土堆】
小土堆课程视频
笔记others:
入门与Dataset数据加载
【入门/数据/预处理】
pycharm 安装:https://www.jetbrains.com/pycharm/、指南、
可以在右上写代码,可以在左下控制台写程序(一般用于调试)
conda-Pytorch
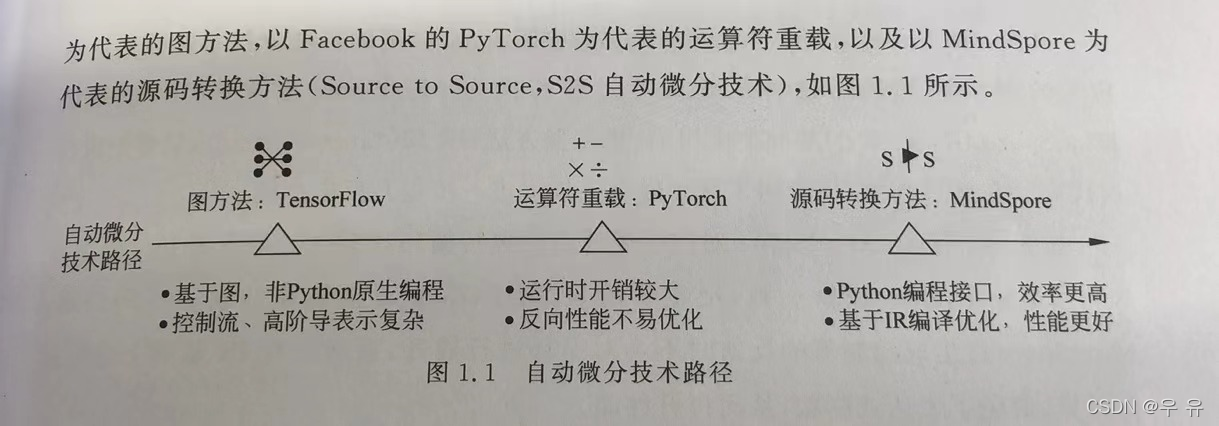
深度学习框架的自动微分技术根据实现原理的不同,分为以Google的TensorFlow为代表的图方法,以facebook的Pytorch为代表的↓
安装过程太慢:下载安装包,复制到Anaconda3=>pkgs
conda install --use-local 包名
torch.cuda.is_available()
1、安装: 指南1★、PyTorch、自己写的环境配置Blog√
看电脑python版本 、conda info -e
pip list:可以查看Python中安装了哪些第三方库
查看GPU是否支持cuda-link:设备管理器-显示适配器 or 任务管理器-性能-GPU、方法
虽然Pytorch完全可以在CPU模式下运行,但大多数情况都是使用GPU支持的Pytorch,需要GPU的支持,所以要下载CUDA.(以后要用再说,可新环境下装)
镜像安装、★Anaconda配置Pytorch、
conda activate pytorch
jupyter notebook
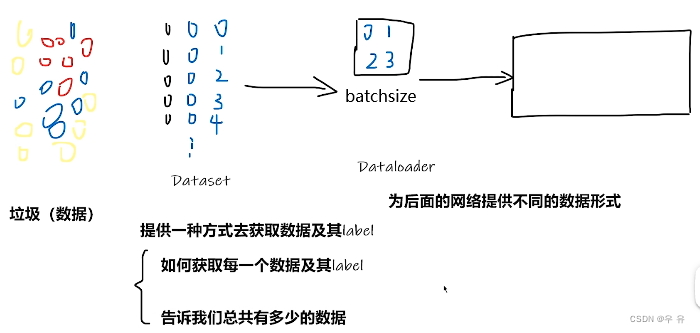
2、两大法宝函数
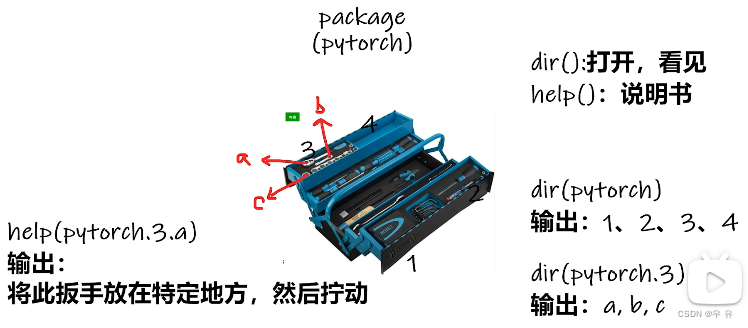
dir()函数:打开、看见,可以当作一个文件夹 (能让我们知道工具箱以及工具箱中的分隔区有什么东西)
help()函数:说明书,在jupyter notebook中使用 排版清晰(能让我们知道每个工具是如何使用的)
3、加载数据(P6)
笔记others:Dateset、
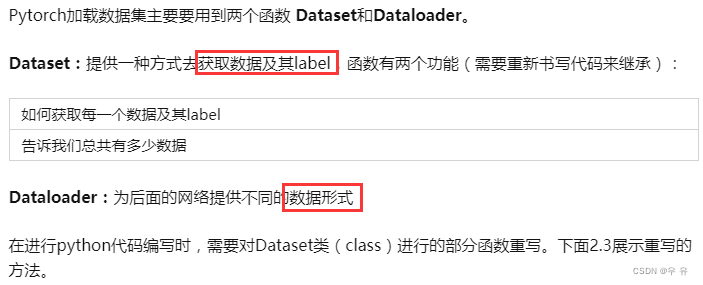
from torch.utils.data import Dataset(从torch的大工具箱里的常用工具区utils里关于数据的data)
查看官方文件×3:①help(Dataset)②Dataset??③按住Ctrl+鼠标点击
class MyData(继承Dataset):
init初始化类去创建实例:一般为整个class提供全局变量,在这里就是为后面的getitem方法和len提供需要的变量(可以放在后面再来写)
一个函数中的变量不能传递个另一个函数中的变量,而self可以把self中指定的内容给后面的函数使用,就相当于指定了一个类中的全局变量。
def __init__(self,root_dir,label_dir):self.root_dir = root_dir //文件夹目录"dataset/train"self.label_dir = label_dir //标签目录"ants"//↓拼在一起,获得每一个标签文件的地址 "dataset/train/ants"self.path = os.path.join(self.root_dir,self.label_dir) //组成列表,就是每一个具体jpg所组成的列表self.img_path = os.listdir(self.path)

getitem(idx作为索引):通过idx索引获取图片地址
获取文件夹中所有图片:import os
首先设置dir_path=r"/" 然后将该文件夹下所有内容转换成列表img_path_list = os.listdir(dir_path) (可以使用img_path_list[0]来查看第一个文件)
获取其中的每一个图片,就是从img_path汇总读取对应位置,因为要引用上面init定义的变量所以要加self。现在找到名称了,还需要找到它在该目录下的相对路径。
def __getitem__(self,idx):img_name = self.img_path[idx]img_item_path = os.path.join(self.root_door,self.label_dir,img_name)//读取图片img = Image.open(img_item_path)//labellabel = self.label_dirreturn img,labellen长度返回,就是返回img路径列表长度
def __len__(self):return len(self.img_path)
然后可以写一个了
root_dir = "dataset/train"
ants_label_dir = "ants"
bees_label_dir = "bees"
ants_dataset = MyData(root_dir,ants_label_dir)
bees_dataset = MyData(root_dir,bees_label_dir)
弹幕提示:报错的把ants_dataset[0]换成ants_dataset.__getitem__(0)
还有一种方式就是将二者数据集拼接:train_dataset = ants_dateset+bees_dateset
复制相对路径:Ctrl+Shift+C 全局路径:Ctrl+Alt+Shift+C
#Python Console逐步显示
from PIL import Image
img_path= ....jpg" #具体图片路径,记得\\进行语义转换
img = Image.open(img_path)
img.show()4、TensorBoard使用
PyTorch下的Tensorboard 使用:用于数据可视化的工具(对transform后的图像进行展示)原本是tensorflow的可视化工具,pytorch从1.2.0开始支持tensorboard。之前的版本也可以使用tensorboardX代替。直接pip之后有可能打开的tensorboard网页是全白的,如果有这种问题,解决方法是卸载之后安装更低版本的tensorboard(直接pip install就可以了)
通过loss可以看我们需要选择什么样的模型(when符合预期)
add_scalar与add_image☆(弹幕:PLT也能达到同样的效果)
tensorboard ValueError: Duplicate plugins for name projector ★有效!
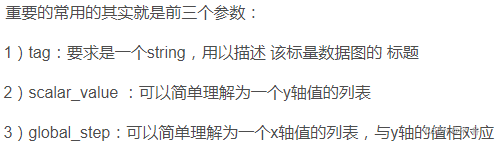
add_scalar(tag, scalar_value, global_step=None, ):将我们所需要的数据保存在文件里面供可视化使用
tag(字符串):保存图的名称
scalar_value(浮点型或字符串):y轴数据(步数)
global_step(int):x轴数据// logdir=事件文件所在文件夹名
// 在项目文件夹Terminal下:默认端口6006
tensorboard --logdir=logs
// 如果修改端口为6007
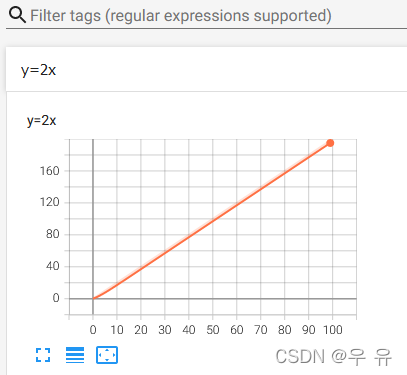
tensorboard --logdir=logs --port=6007writer.add_scalar("目标函数",global_step,scalar_value)
#global_step 对应x轴;scalar_value对应y轴writer.add_scalar("y=x",i,i) # y = x 下图1
writer.add_scalar("y=2x",2*i,i) # y = 2x 下图2
writer.add_scalar("y=2x",3*i,i) # y = 3x 下图3

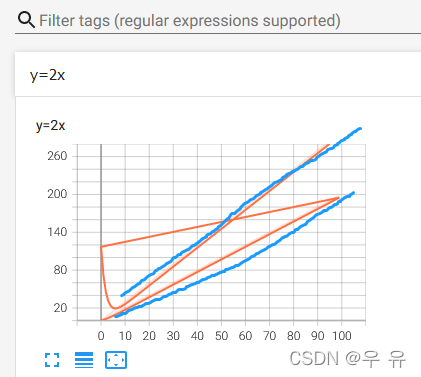
看到图3有个过渡拟合过程。解决办法:①logs下文件全部删除②run③在Terminal下新开local并再次输入命令(tensorboard --logdir=logs) 就得到想要的图像了(出问题就设置绝对路径)
Tensorboard: SummaryWriter类(pytorch版) :大意是将条目直接写入 log_dir 中的事件文件以供 TensorBoard 使用(`SummaryWriter` 类提供了一个高级 API,用于在给定目录中创建事件文件,并向其中添加摘要和事件)。tensorboard --logdir=XXXX(XXXX就是你要求tensorboard writer把文件写入的那个地方在上图中就是logs),为了防止端口冲突,可以设置一个特别的端口,就是在上面的命令后再加一个 --port=端口
add_image(self, tag, img_tensor, global_step=none, walltime=none, dataformats=‘CHW’)
add_image(self, tag, img_tensor, global_step=none, walltime=none, dataformats=‘CHW’)
绘制图片,可用于检查模型的输入,监测 feature map 的变化,或是观察 weight。
tag:就是保存图的名称
img_tensor:图片的类型要是torch.Tensor, numpy.array, or 这三种OpenCV读取的数据格式就是Numpy型,可以print(type(img))看一下类型,常用pil
global_step:第几张图片
dataformats=‘CHW’,默认CHW,tensor是CHW,numpy是HWC这里可能会报错,可以debug或者print(xxx.shape)查看一下,if维度问题就在这改
完整代码:某张图片的路径给img_path; 打开这张图片到img_PIL; 因为add_image要求图片类型为tensor/numpy/string,而pil查看type(img_path为pil),所以先转成numpy;[可以print一下type和shape(opencv读取的数据格式是Numpy)]; 然后就可以设置add_image里的参数了,up遇到的一个问题就是dataformats注意一下shape
from torch.utils.tensorboard import SummaryWriter
import numpy as np
from PIL import Imagewriter = SummaryWriter("logs")
image_path = "data/train/ants_image/6240329_72c01e663e.jpg"
img_PIL = Image.open(image_path)
img_array = np.array(img_PIL)
print(type(img_array))
print(img_array.shape)writer.add_image("train", img_array, 1, dataformats='HWC')
# y = 2x
for i in range(100):writer.add_scalar("y=2x", 3*i, i)writer.close()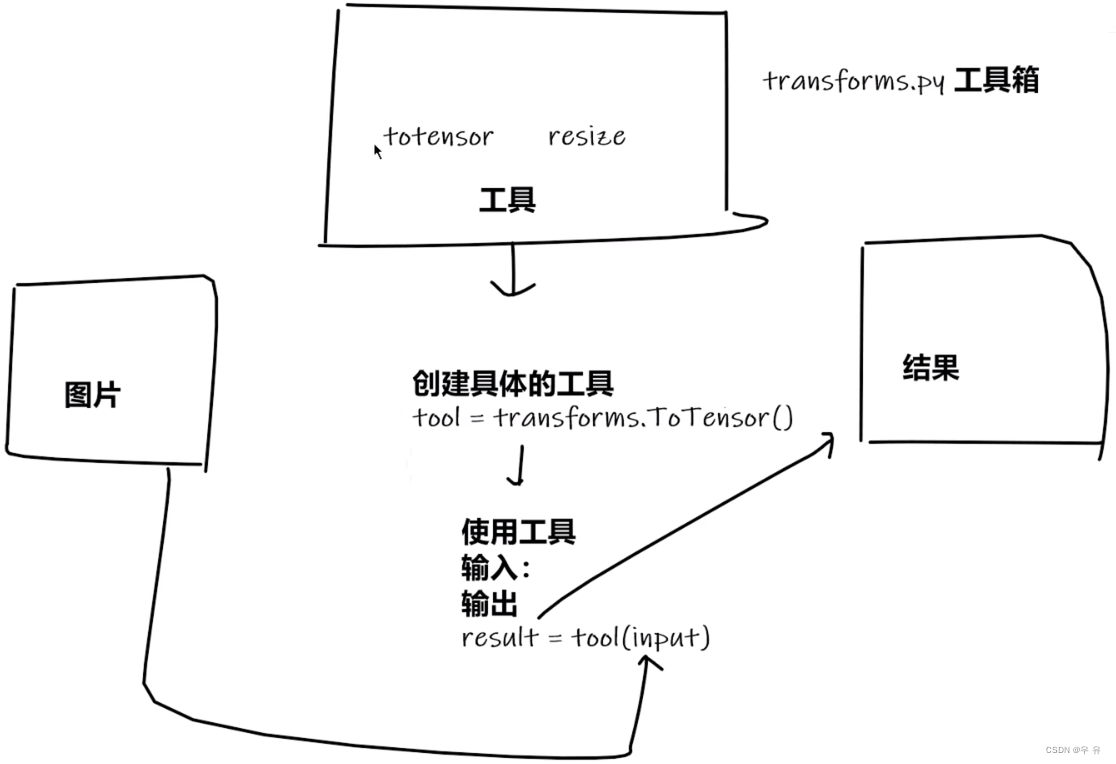
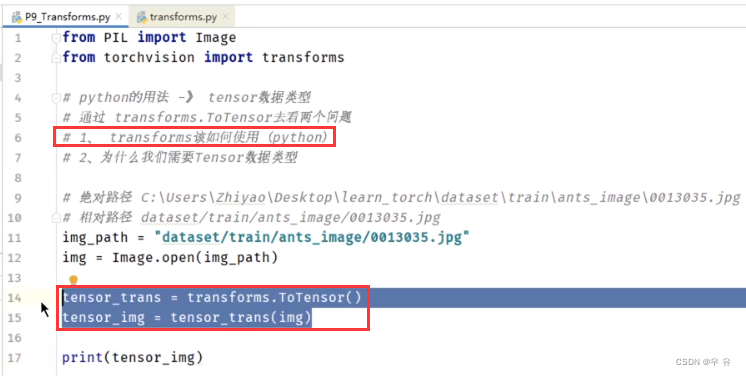
5、torchvision中的transforms
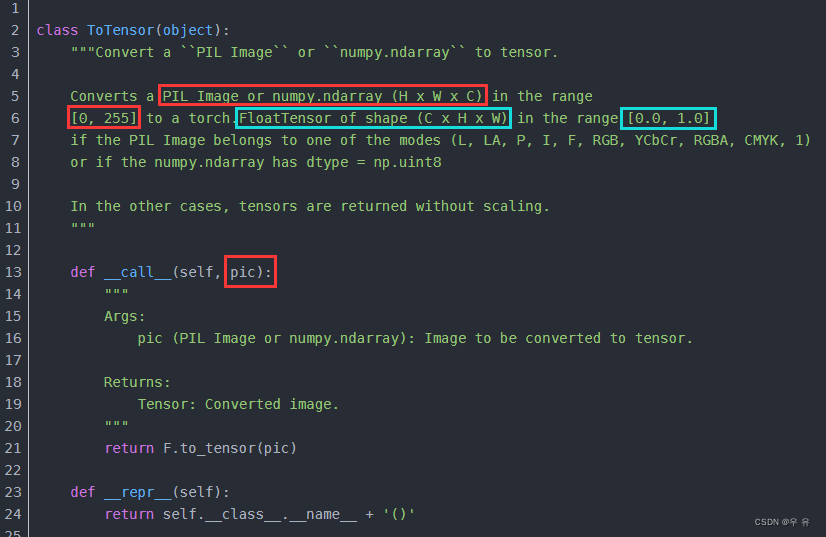
①使用的时候注意input和output的类型;
②多看官方文档,关注方法需要什么参数(在使用的时候就去看它官方文档中的init文件,对功能和参数都有很清晰的解释);
③不知道返回值or数据是什么类型or有TypeError报错的haul,就print、print(type())、debug
④借助一下tensorboard工具查看得到的图片
Alt+Enter 导入库 Ctrl+P 看要加什么参数

视频笔记:
from torchvision import transforms ->进入transform 定义了很多class的工具箱
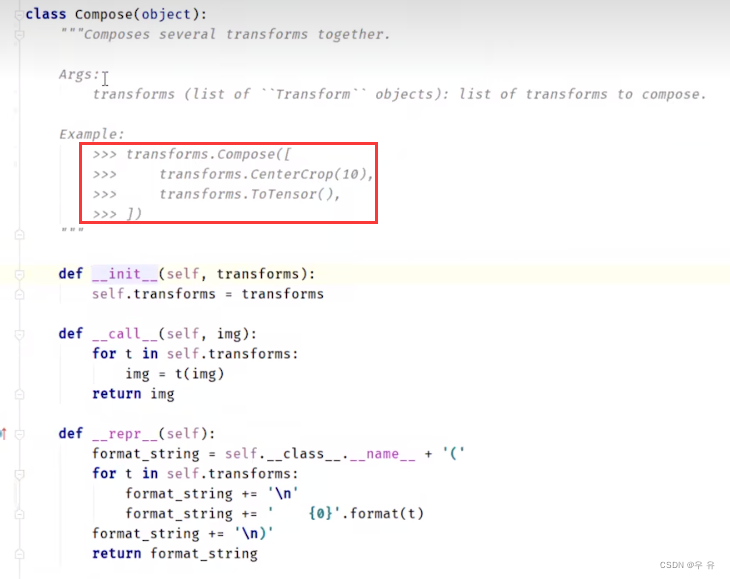
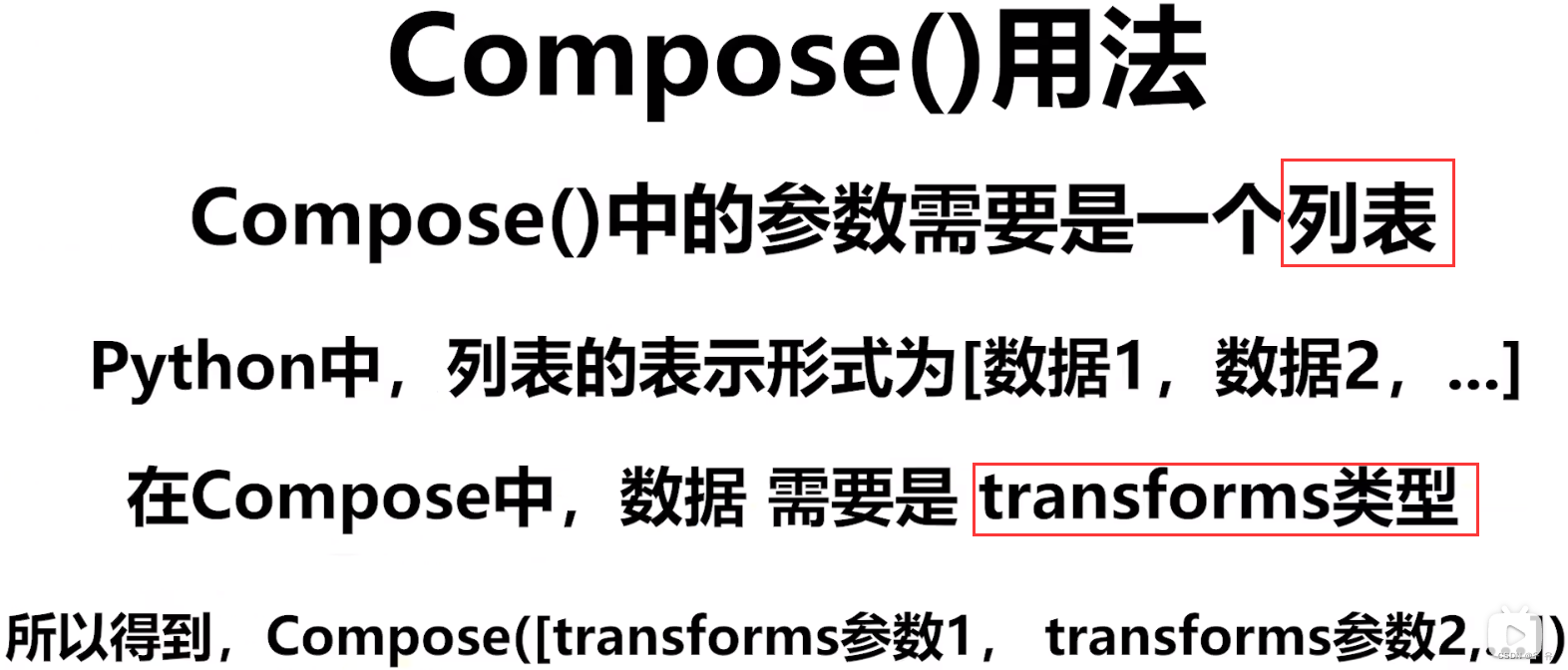
torchvision.transforms中的compose,常用的是(PIL/numpy)ToTensor√、Normalize、Resize
关于__call__的使用(双下划线就是内置参数)
class Person:def __call__(self,name):print("__call__"+" Hello"+name)
person = Person()
person("zahngsan")//可以ctrl+P看有没有参数输入提示
//输出:__call__ Hello zhangsanclass Person:def hello(self,name)print("hello"+name)
person = Person()
person.hello("zhangsan")
//输出:zhangsan关于ToTensor的使用

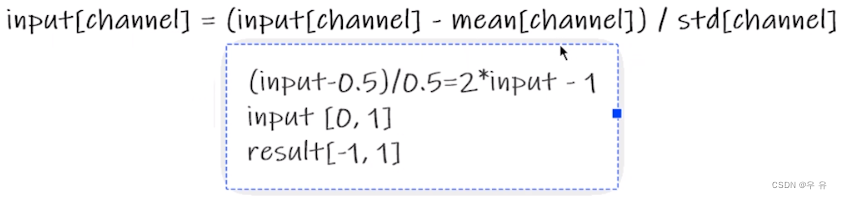
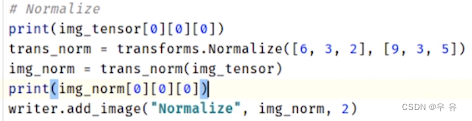
关于Normalize的使用(传入RGB三个通道的均值和标准差)(输入PIL图片)
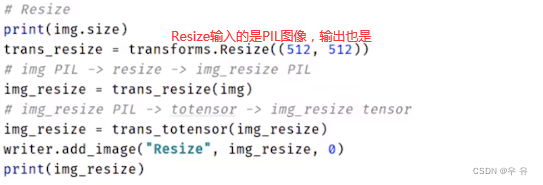
关于resize的使用(输入是PIL)
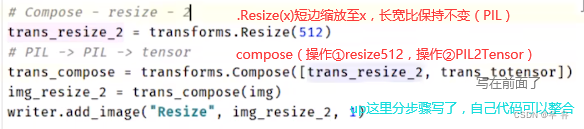
 (下面2实际代码参数换位置会报TypeError类型错误)
(下面2实际代码参数换位置会报TypeError类型错误)
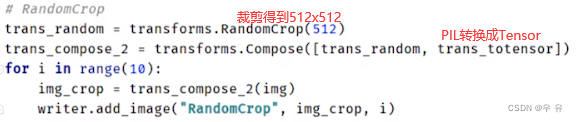
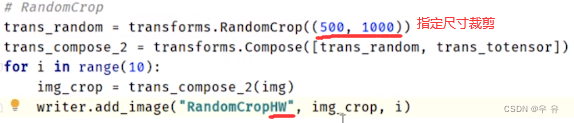
关于随机裁剪RandomCrop的使用
6、torchvision中数据集的使用:Dataset和Dataloader
官网torchvision中数据集(datasets、)(迅雷工具)


import torchvision
from torch.utils.tensorboard import SummaryWriterdataset_transform = torchvision.transforms.Compose([torchvision.transforms.ToTensor()
])train_set = torchvision.datasets.CIFAR10(root="./dataset", train=True, transform=dataset_transform, download=True)
test_set = torchvision.datasets.CIFAR10(root="./dataset", train=False, transform=dataset_transform, download=True)writer = SummaryWriter("p10")
for i in range(10):img, target = test_set[i]writer.add_image("test_set", img, i)writer.close()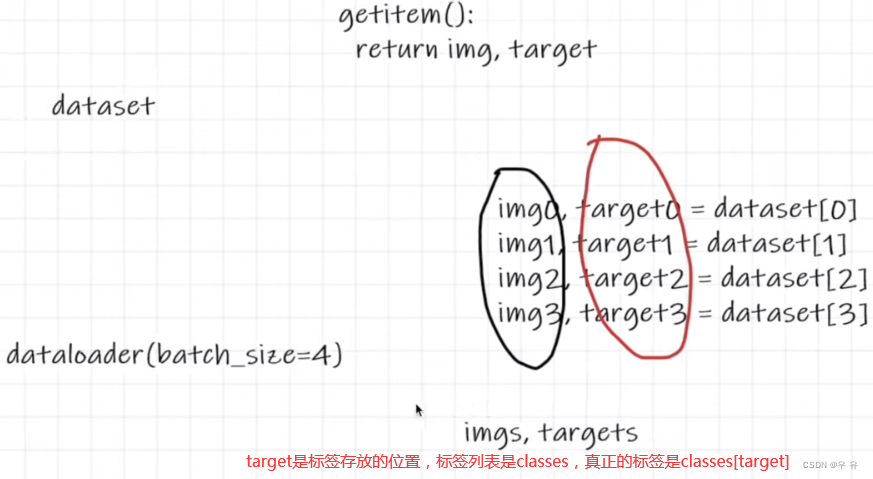
shuffle取数据的时候batchsize里图片顺序是被打乱的
【神经网络】
1、Pytorch中的torch.nn、nn.Module、Conv2d卷积、maxpool最大池化、非线性激活、线性else
小结:学会看Pytorch官方文档、tensorboard工具来可视化(入门) 、ctrl+P参数
torch.nn container↓
| Module | Base class for all neural network modules.(模板,你们拿去用吧/修改吧在init和forward) |
| Sequential | A sequential container. (☆ self.model = nn.sequential(,,,,,) |
| ModuleList | Holds submodules in a list. |
| ModuleDict | Holds submodules in a dictionary. |
| ParameterList | Holds parameters in a list. |
| ParameterDict | Holds parameters in a dictionary. |
import torch.nn as nn
import torch.nn.functional as Fclass Model(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv2d(1, 20, 5)self.conv2 = nn.Conv2d(20, 20, 5)def forward(self, x):x = F.relu(self.conv1(x))return F.relu(self.conv2(x))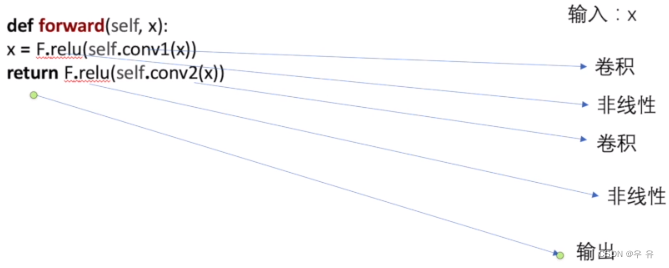
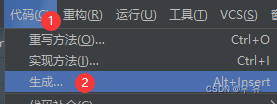
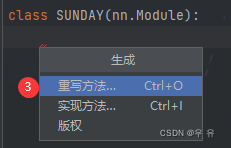
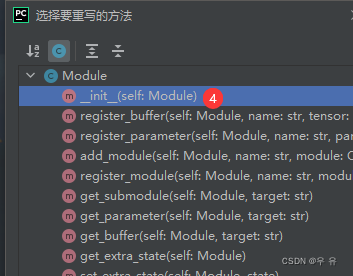
以nn.Module为例,好用工具之"代码 -> 生成 -> 重写 ->挑你要的方法"
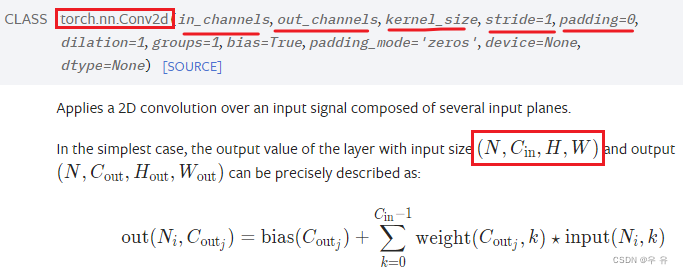
卷积conv2d(主要是5参数,再主要是前两参数in_channel,out_channel,kernel,stride,padding)
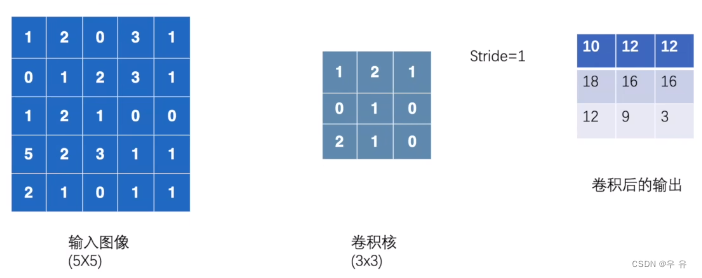 (1channel)
(1channel)
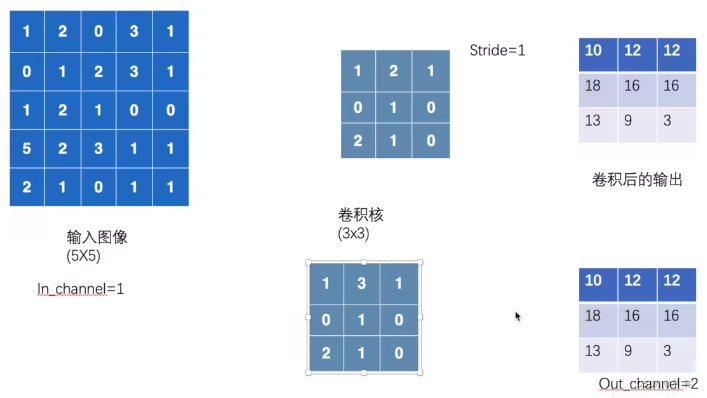 output_c=2c
output_c=2c
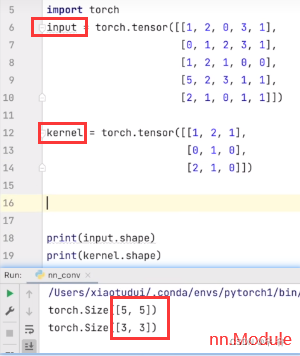
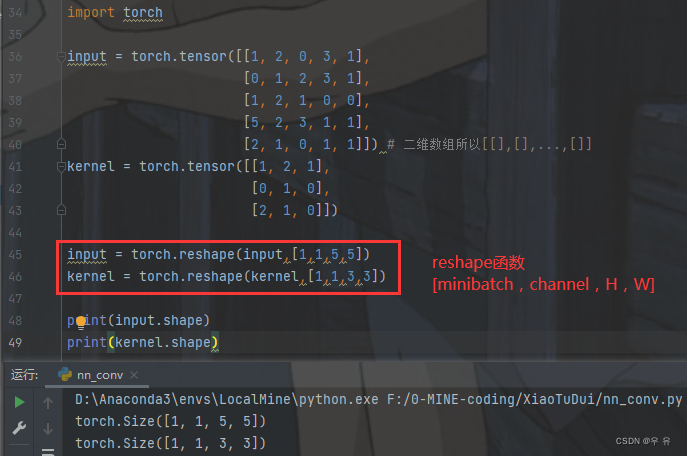
首先传入Input和Kernel发现都是只有HW(左图),而conv要求通道minibatch、channel、H、W,所以要利用Torch.reshape进行改变。(例子nn.conv2d,output2是步长2,output3是paddding=1)
| nn.Conv1d | Applies a 1D convolution over an input signal composed of several input planes. |
| nn.Conv2d | Applies a 2D convolution over an input signal composed of several input planes.(主要用2d |
| nn.Conv3d | Applies a 3D convolution over an input signal composed of several input planes. |
在跟着up写conv2d时遇到的一些问题:
报错1:urllib.error.URLError: <urlopen error [SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: certificate has expired (_ssl.c:1122)>还有module 'urllib' has no attribute 'urlopen'
原因及解决办法(方法2):是由于python版本之间差异导致的,Python 3中urllib2用urllib.request替代;所以把所有位置都换成带有.request,继续报错,关闭ssl本地认证(加进代码),然后写入main主函数里(不放在里面也可以跑通)。
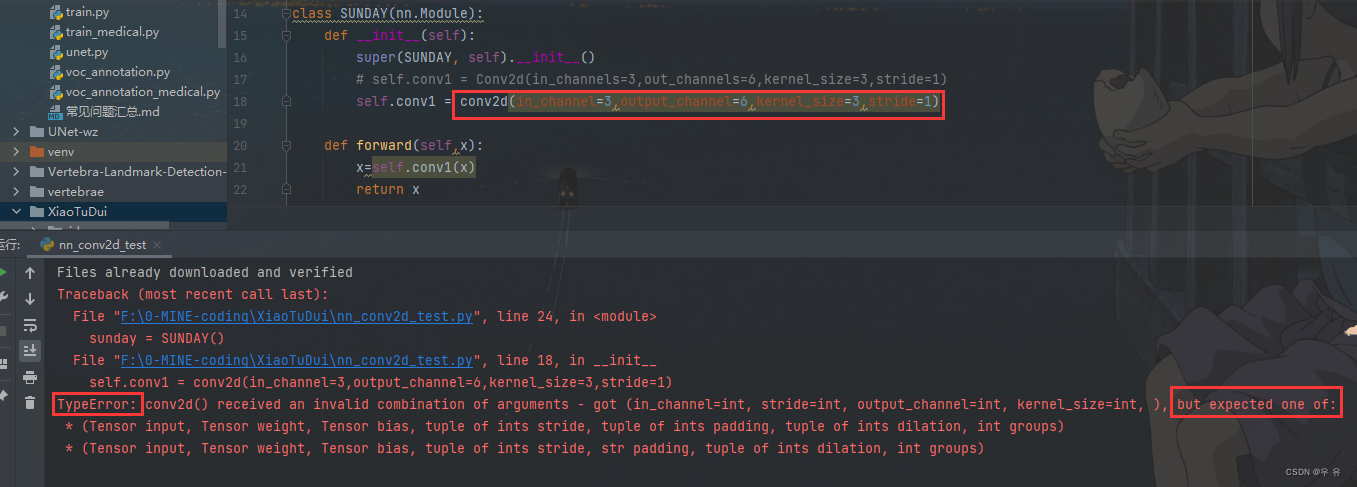
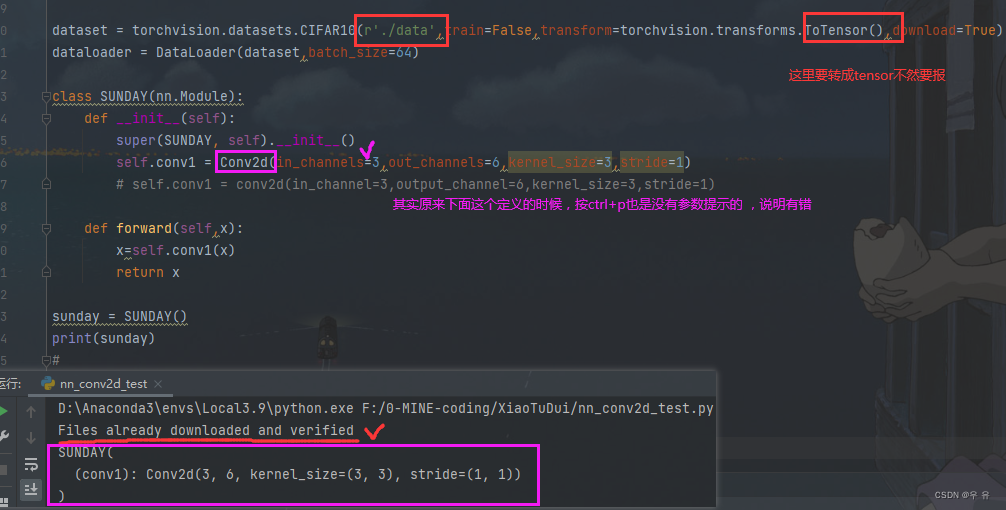
报错2:自己去写第一步输出卷积的时候,加载的是之前已经下载好的数据集;然后有下面一个报错,是因为conv2d这里写错了,改成Conv2d并且红色灯泡Import就可以解决了 。
报错3:SyntaxError: Non-UTF-8 code starting with '\xba' in file
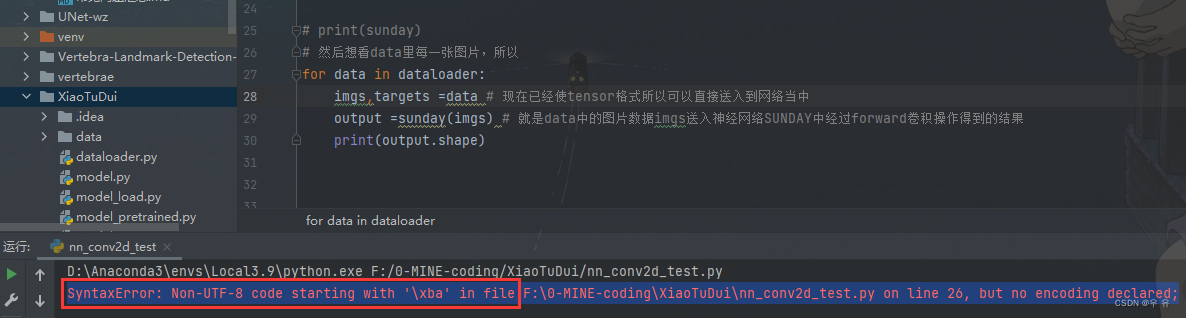
解决方法:在代码最开头加上这句(我小写也不行)
# coding=UTF-8接着就是借助tensorboard工具可视化过程一下
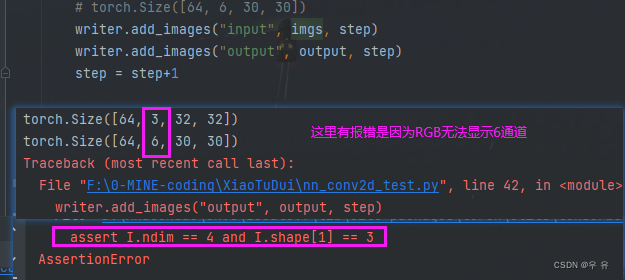
报错4:设置的output_c是6,而RGB三通道无法显示,所以up提供了reshape方法,但不严谨
然后取terminal终端去输入↓命令,就打开了。
tensorboard --logdir=logs最终版:
# coding=UTF-8
import torchvision.datasets
import torch
import torchvision
from torch import nn, conv2d
from torch.nn import Conv2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriterimport ssl
ssl._create_default_https_context = ssl._create_unverified_contextclass SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.conv1 = Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1)# self.conv1 = conv2d(in_channel=3,output_channel=6,kernel_size=3,stride=1)def forward(self,x):x=self.conv1(x)return xif __name__ == '__main__':dataset = torchvision.datasets.CIFAR10(r'./data', train=False, transform=torchvision.transforms.ToTensor(),download=True)dataloader = DataLoader(dataset, batch_size=64)sunday = SUNDAY()# print(sunday)# 然后想看data里每一张图片,所以writer =SummaryWriter("../logs")step =0 #global_stepfor data in dataloader:imgs, targets = data # 现在已经使tensor格式所以可以直接送入到网络当中output = sunday(imgs) # 就是data中的图片数据imgs送入神经网络SUNDAY中经过forward卷积操作得到的结果print(imgs.shape) # 看一下conv1是否实现# torch.Size([64, 3, 32, 32])print(output.shape)# torch.Size([64, 6, 30, 30])writer.add_images("input", imgs, step)output = torch.reshape(output, (-1,3,30,30)) # 不知道第一个数是多少的时候就写-1,会自动根据后面writer.add_images("output", output, step)step = step+1MaxPool2d 最大池化-下采样(目的是为了保留特征 同时 减小数据量)
Parameters:kernel_size、stride、padding、dilation空洞卷积、ceil_mode
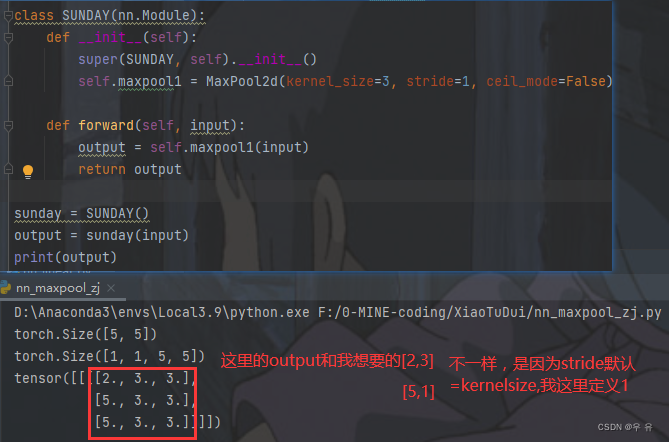
最大池化中stride参数默认值是kernel_size(卷积中默认是1)
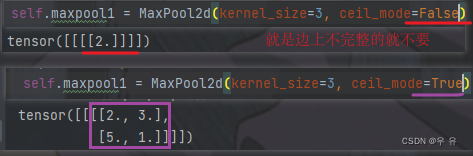
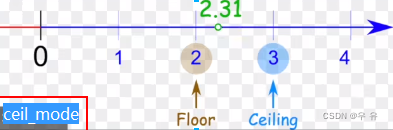 true=保留,默认的ceil_mode是false也就是不保留
true=保留,默认的ceil_mode是false也就是不保留
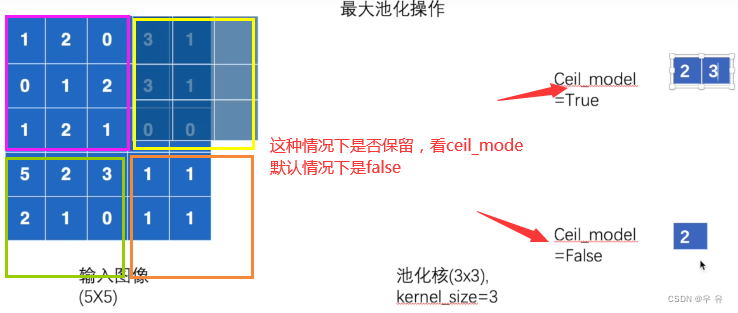
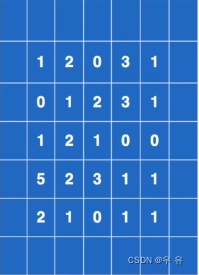
写个程序来实现和验证一下这个过程和结果
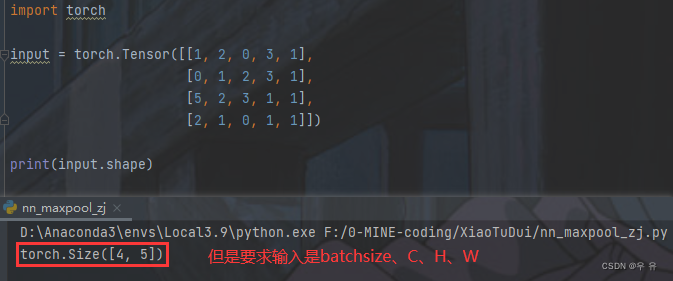
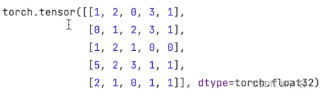
如果出现RuntimeError:"max_pool2d_with_indices_cpu"not implemented for 'Long',就可以在后面加上dtype=float32,这样1就会变成1.0(浮点型)【最大池化】
import torch
import torchvision.datasets
from torch import nn
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriterdataset = torchvision.datasets.CIFAR10(r'./data', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)# input = torch.Tensor([[1, 2, 0, 3, 1],
# [0, 1, 2, 3, 1],
# [1, 2, 1, 0, 0],
# [5, 2, 3, 1, 1],
# [2, 1, 0, 1, 1]])
# print(input.shape)
# input = torch.reshape(input, (-1, 1, 5, 5))
# print(input.shape)class SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.maxpool1 = MaxPool2d(kernel_size=3, ceil_mode=False)def forward(self, input):output = self.maxpool1(input)return outputsunday = SUNDAY()
# output = sunday(input)
# print(output)writer = SummaryWriter("../log_maxpool")
step = 0for data in dataloader:imgs, targets = datawriter.add_images("input", imgs, step)output = sunday(imgs)writer.add_images("output", output, step)step = step + 1writer.close() 在terminal运行tensorboard --logdir=max_pool查看Imgs-output结果
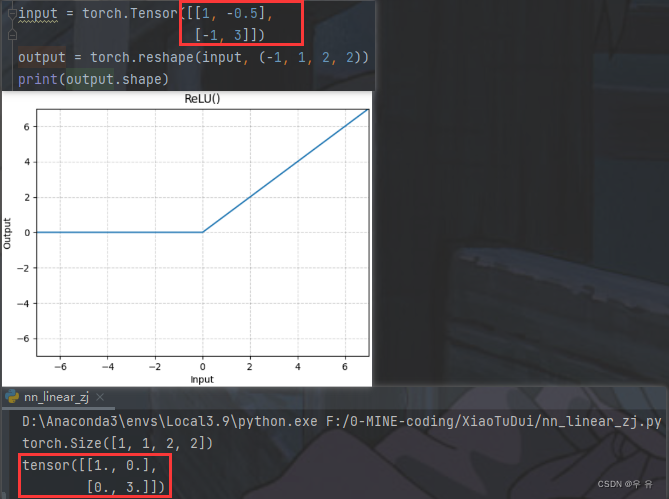
Non-linear Activations非线性激活ReLU、Sigmoid:向神经网络中引入一些非线性的特征,才可以训练处符合更多特征的模型,提高模型的泛化性
nn.ReLU、nn.Sigmoid(以ReLU为例)

import torch
import torchvision
from torch import nn
from torch.nn import ReLU, Sigmoid
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriterdataset = torchvision.datasets.CIFAR10(r'./data', train=False, transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64)class SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.sigmoid1 = Sigmoid()def forward(self, input):output = self.sigmoid1(input)return outputsunday = SUNDAY()writer = SummaryWriter("../logs_sigmoid")
step = 0
for data in dataloader:imgs, targets = datawriter.add_images("input", imgs, global_step=step)output = sunday(imgs)writer.add_images("output",output,global_step=step)step +=1writer.close()# relu函数
# input = torch.Tensor([[1, -0.5],
# [-1, 3]])
# output = torch.reshape(input, (-1, 1, 2, 2))
# print(output.shape)
#
# class SUNDAY(nn.Module):
# def __init__(self):
# super(SUNDAY, self).__init__()
# self.relu1 = ReLU()
#
# def forward(self,input):
# output = self.relu1(input)
# return output
#
# sunday = SUNDAY()
# output = sunday(input)
# print(output)Normalizetion Layers(加快训练速度):注意一下num_feature=C [batchsize、C、H、W]
线性层使用的也比较多;Dropout是在训练的过程中以概率p将input中随机变成0,防止过拟合;Distance Functions就是计算两者之间的误差等;Loss Funtion;RecurrentLayer用于文字识别中较多;TransformerLayers;
Linear:torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None),线性层现在多用来做分类任务的分类头
import torch
import torchvision
from torch import nn
from torch.nn import Linear
from torch.utils.data import DataLoaderdataset = torchvision.datasets.CIFAR10(r'./data', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)class SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.linear1 = Linear(196608,10)def forward(self, input):# output = self.linear1(input)# return outputreturn self.linear1(input)sunday = SUNDAY()for data in dataloader:imgs, targets = dataprint(imgs.shape)output = torch.reshape(imgs,(1,1,1,-1))print(output.shape)# sunday = SUNDAY(output)output = sunday(output)print(output.shape)过程报错×2:
TypeError: __init__() takes 1 positional argument but 2 were given(实例化格式使用错误)
AttributeError: 'Tensor' object has no attribute 'linear1'(forward里参数传递顺序出错)
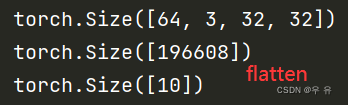
RuntimeError: mat1 and mat2 shapes cannot be multiplied (1x49152 and 196608x10)(显然这只是中间过程,不必纠结。下图左1,看出reshape可以改变shape;fatten拼在一起,左3)
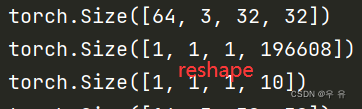
 关于reshape:torch.reshape用来改变tensor的shape;其中的-1代表的含义-根据剩余自行排定;
关于reshape:torch.reshape用来改变tensor的shape;其中的-1代表的含义-根据剩余自行排定;
CAFIR10 module structure:Conv2d参数、MaxPool2d参数、
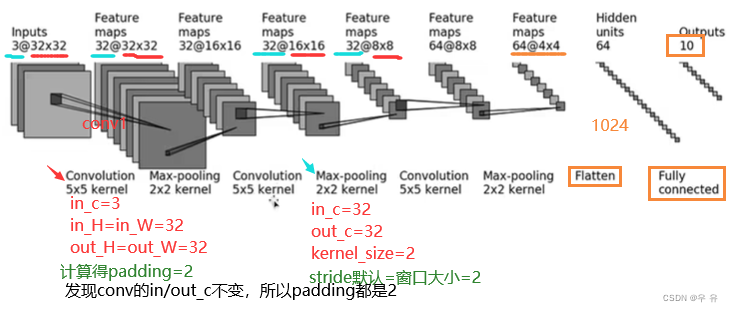
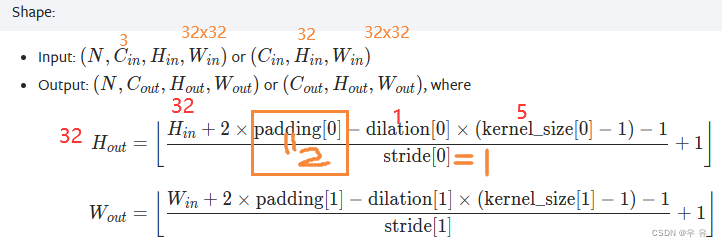
根据输入输出和kernel_size计算padding(就是看原本计算出的输出中HW是不是32x32)
如果不指定,默认stride跟最大池化窗口大小一致(不是和conv一样为1)。
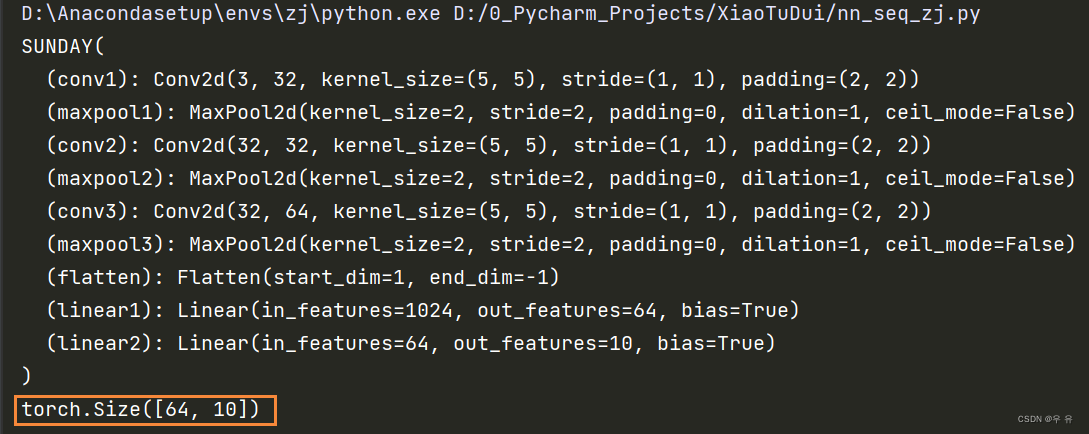
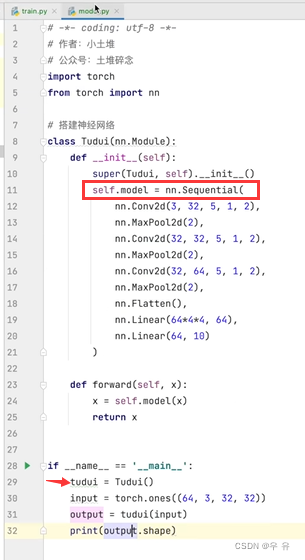
网络搭建完毕如下,需要验证其是否正确(可以验证后修改比如Linear中参数看是否会报错)
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linearclass SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.conv1 = Conv2d(in_channels=3, out_channels=32, kernel_size=5, stride=1, padding=2)self.maxpool1 = MaxPool2d(kernel_size=2)self.conv2 = Conv2d(in_channels=32, out_channels=32, kernel_size=5, stride=1, padding=2)self.maxpool2 = MaxPool2d(kernel_size=2)self.conv3 = Conv2d(in_channels=32, out_channels=64, kernel_size=5, stride=1, padding=2)self.maxpool3 = MaxPool2d(kernel_size=2)self.flatten = Flatten()self.linear1 = Linear(in_features=1024, out_features=64) #删除这两行,print看网络输出的是什么self.linear2 = Linear(in_features=64, out_features= 10) # torch.size([64,1024])def forward(self, x):x =self.conv1(x)x = self.maxpool1(x)x = self.conv2(x)x = self.maxpool2(x)x = self.conv3(x)x = self.maxpool3(x)x = self.flatten(x)x = self.linear1(x)x = self.linear2(x)return xsunday = SUNDAY()
print(sunday)
input = torch.ones((64,3,32,32)) # batchsize,C,H,W
print(sunday(input).shape)
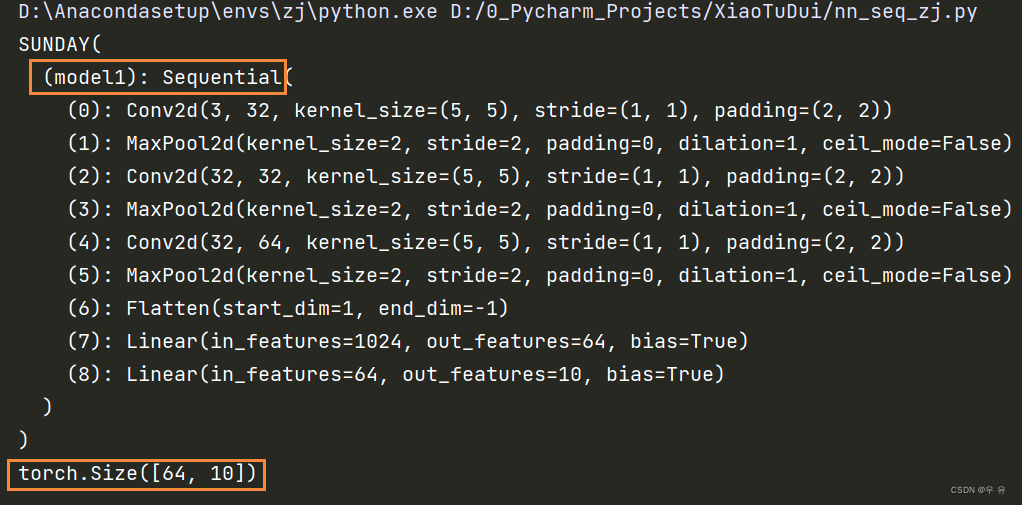
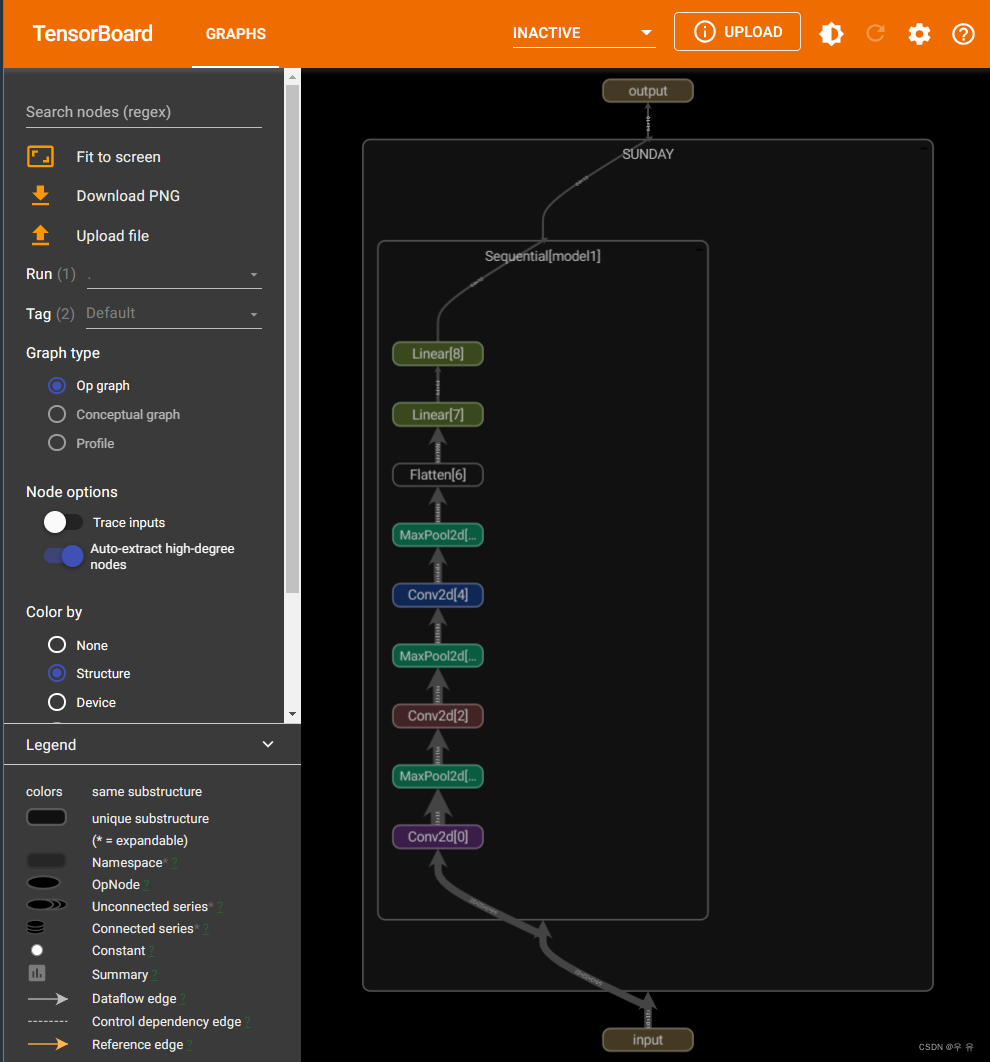
sequential使用:运行结果如下(与上面对比一下)、others笔记
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear# 使用sequent
class SUNDAY(nn.Sequential):def __init__(self):super(SUNDAY, self).__init__()self.model1 = nn.Sequential(Conv2d(3, 32, 5, padding=2), #使用sequential时用逗号分割层与层MaxPool2d(2),Conv2d(32, 32, 5, padding=2),MaxPool2d(2),Conv2d(32, 64, 5, padding=2),MaxPool2d(2),Flatten(),Linear(1024, 64),Linear(64, 10))def forward(self, x):return self.model1(x)sunday = SUNDAY()
print(sunday)
input = torch.ones(64, 3, 32, 32)
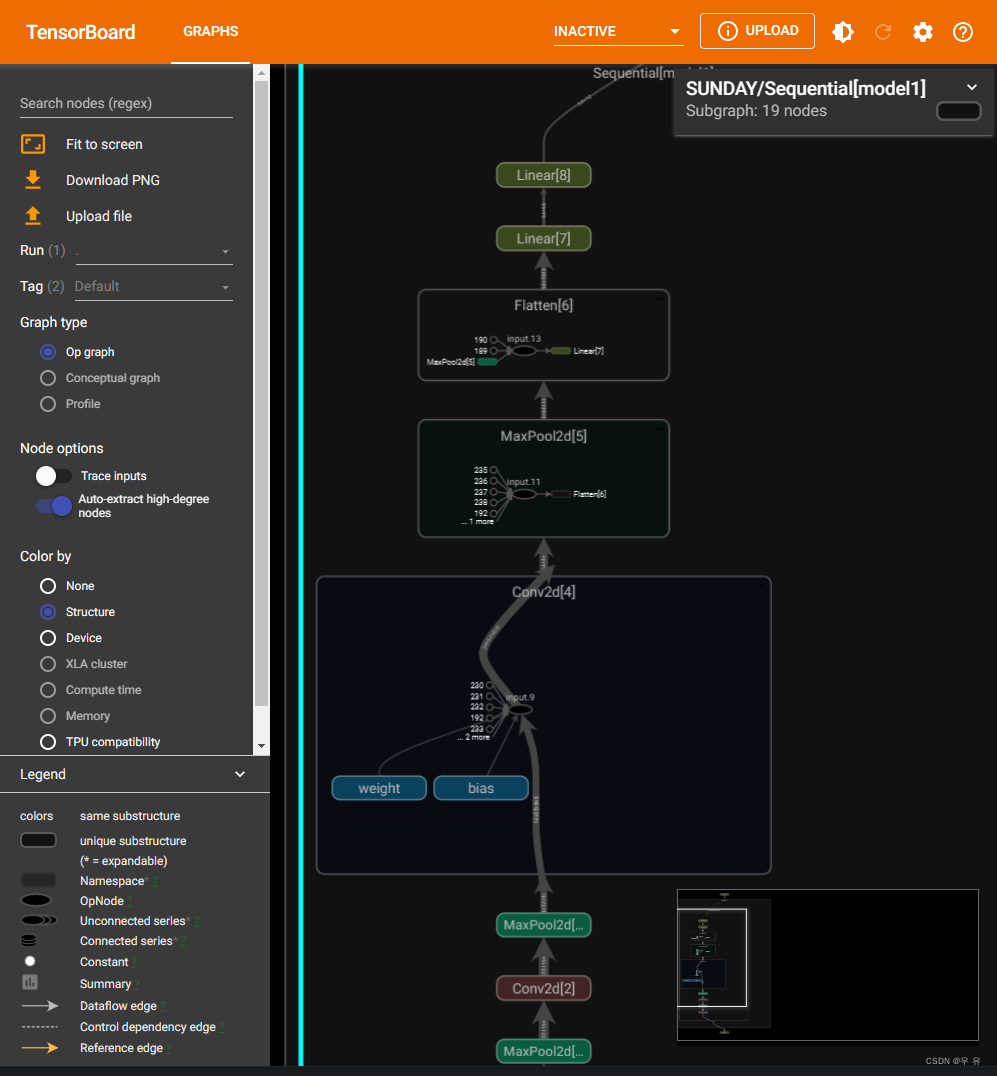
print(sunday(input).shape)# tensorboard --logdir=log_seq终端查看,双击网络展示细节
writer = SummaryWriter("../log_seq")
writer.add_graph(sunday, input)
writer.close()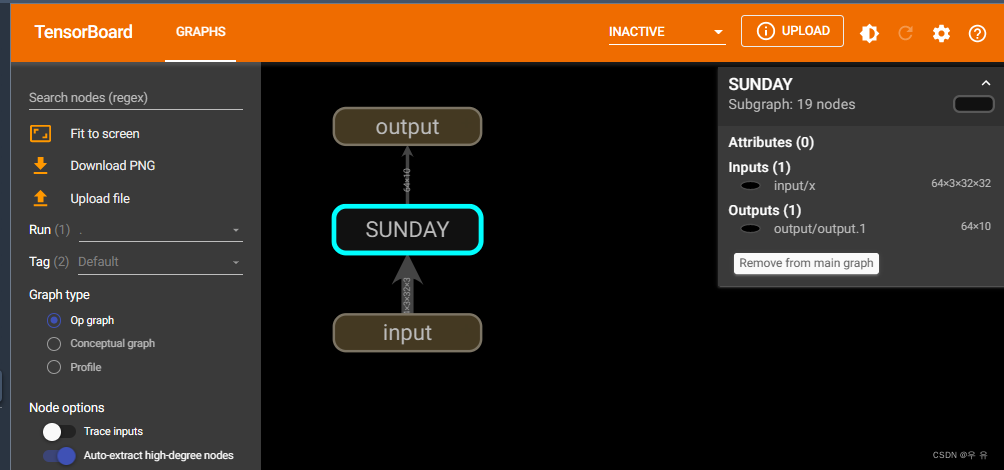
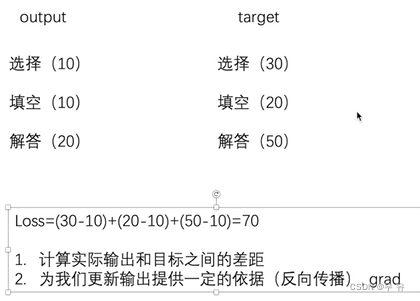
2、损失函数与反向传播
报错:
TypeError: new() received an invalid combination of arguments - got (list, dtype=torch.dtype), but expected one of:(一些语法和拼写大小问题.tensor不是.Tensor、torch.float32√和numpy.float、以及基本的NN.L1Loss()这里后面的括号)
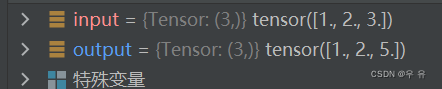
RuntimeError: Boolean value of Tensor with more than one value is ambiguous(Input/output需要reshape一下,但是我没有reshape,debug查看了一下二者的值(下1);reshape之后也看了一下(下3);发现自己loss拼写错位,修改后没有reshape也可以进行计算)【再看tprch.nn具体文档的时候注意一下函数中的参数及shape要求】
 还有报错原因是我想把一些代码合并,或如下图注释中的错误代码,一开始想着为什么不直接把input和output传到L1Loss里面去,但是报错上面第一条。 后面去看了loss.py(下下图),一个是定义这个loss功能,一个是使用它,简单了解就是一个用来声明,一个用来使用,前者参数定义的是我这个Loss是计算什么的,后者参数传入需要计算的内容。
还有报错原因是我想把一些代码合并,或如下图注释中的错误代码,一开始想着为什么不直接把input和output传到L1Loss里面去,但是报错上面第一条。 后面去看了loss.py(下下图),一个是定义这个loss功能,一个是使用它,简单了解就是一个用来声明,一个用来使用,前者参数定义的是我这个Loss是计算什么的,后者参数传入需要计算的内容。
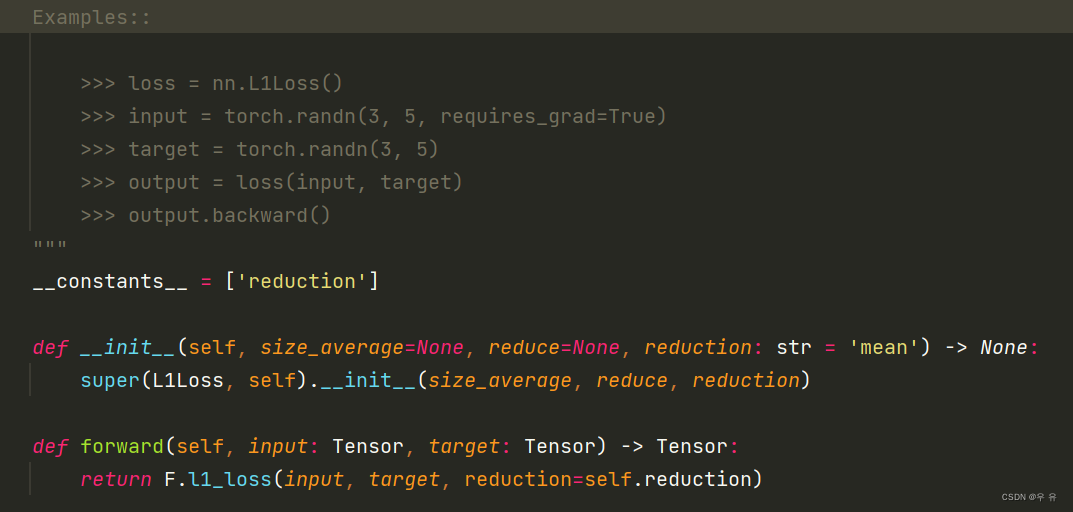
import torch
# from torch.nn import L1Loss
from torch import nninput = torch.tensor([1, 2, 3], dtype = torch.float32)
output = torch.tensor([1, 2, 5], dtype = torch.float32)input = torch.reshape(input, (1, 1, 1, 3))
output = torch.reshape(output, (1, 1, 1, 3))loss_mean = nn.L1Loss()
loss_sum = nn.L1Loss(reduction='sum')
loss_mse = nn.MSELoss()print(loss_mean(input, output))
print(loss_sum(input, output))
print(loss_mse(input, output))# up使用方法
# loss = L1Loss()
# loss2 = L1Loss(reduction='sum')
# result = loss(input, output)
# result = loss2(input, output)
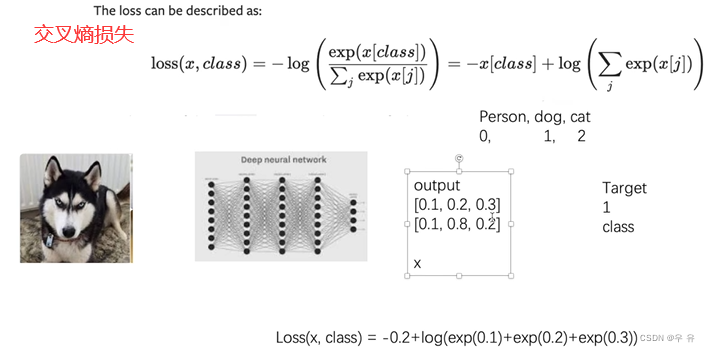
# print(result)关于交叉熵损失函数,up讲解时和现在官方文档有一些差别
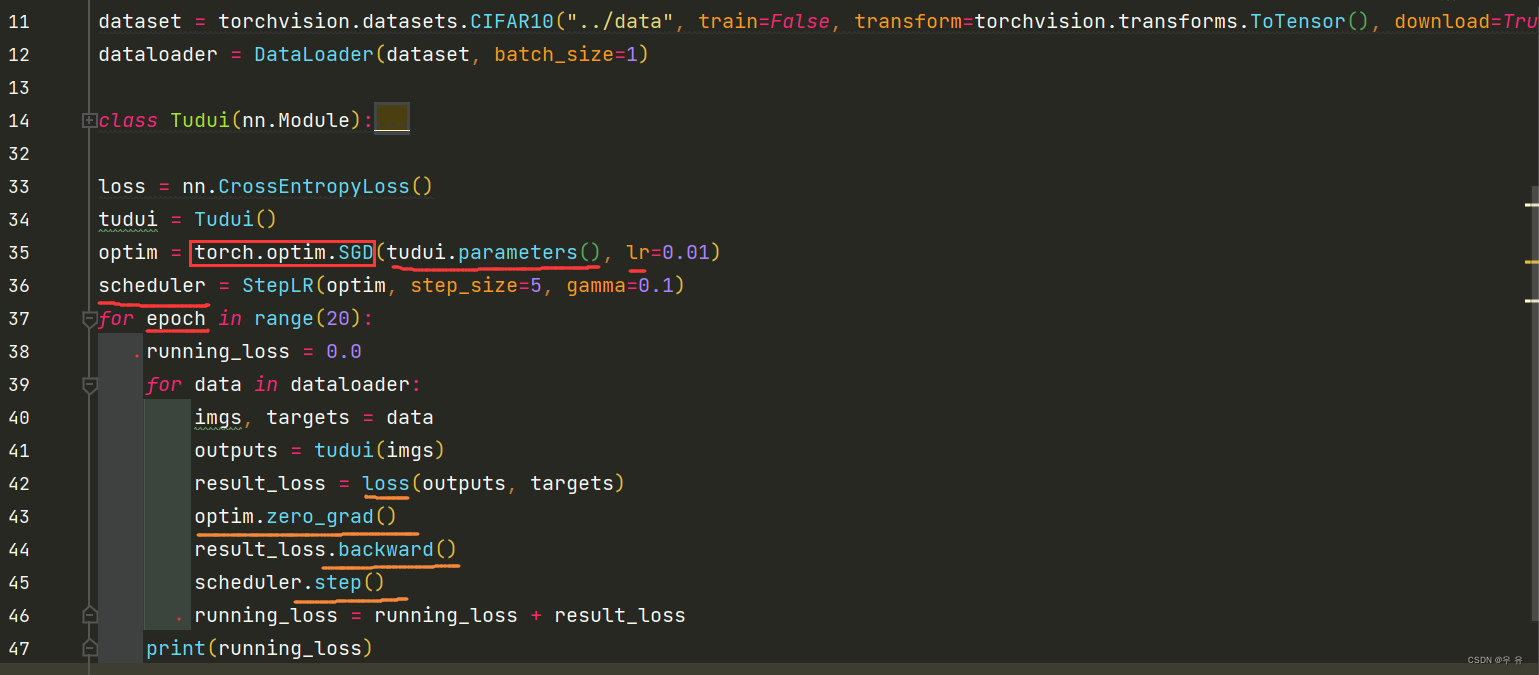
反向传播是对result_loss计算,不是对loss(可以debug看,加上.backward()后grad会更新),一定会有的一行代码时optim.zero_grad(),上一次的梯度对下一次的梯度来说无用要清零
torch.optim主要是传入param和lr(一开始可设置比较大)
 接下来的部分 主要围绕:
接下来的部分 主要围绕:
3、现有模型的使用和修改、保存于读取
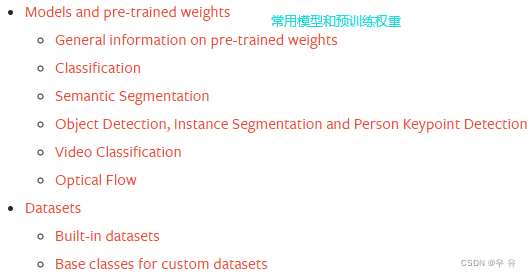
torchvision-module选VGG16-使用ImageNet训练(需要下载到本地)、others笔记[很清晰 针不戳]
尝试了一下,默认pretrained=True,也可以在()设定
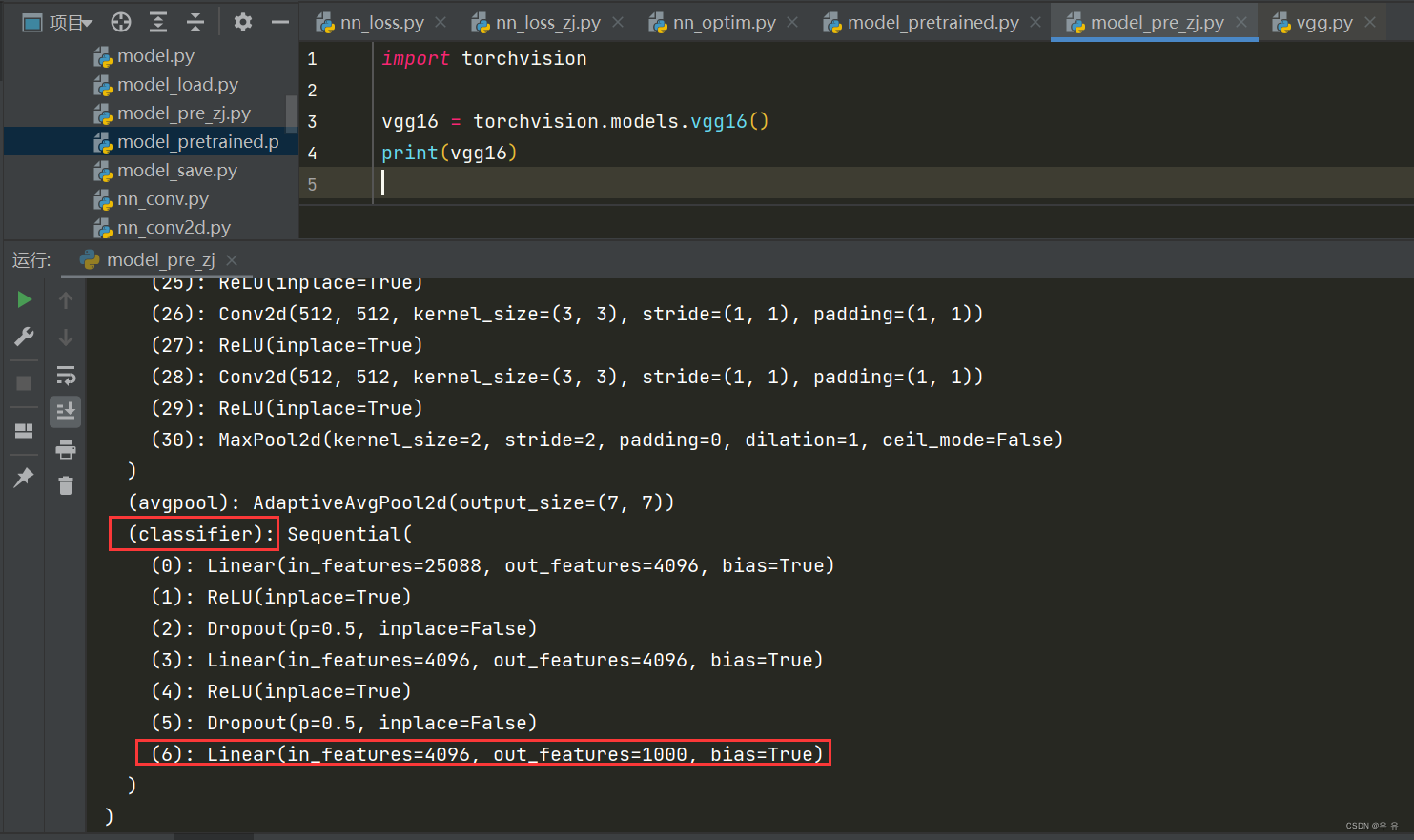
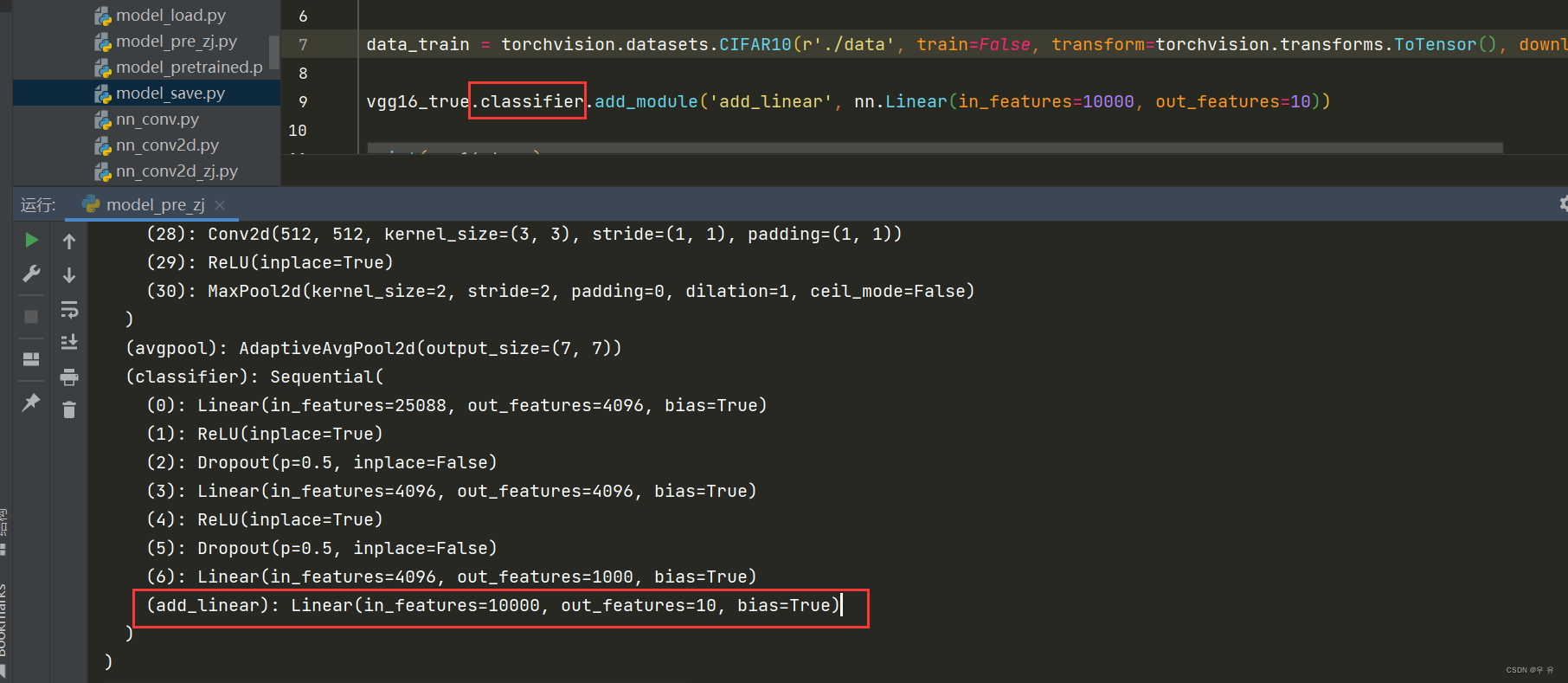
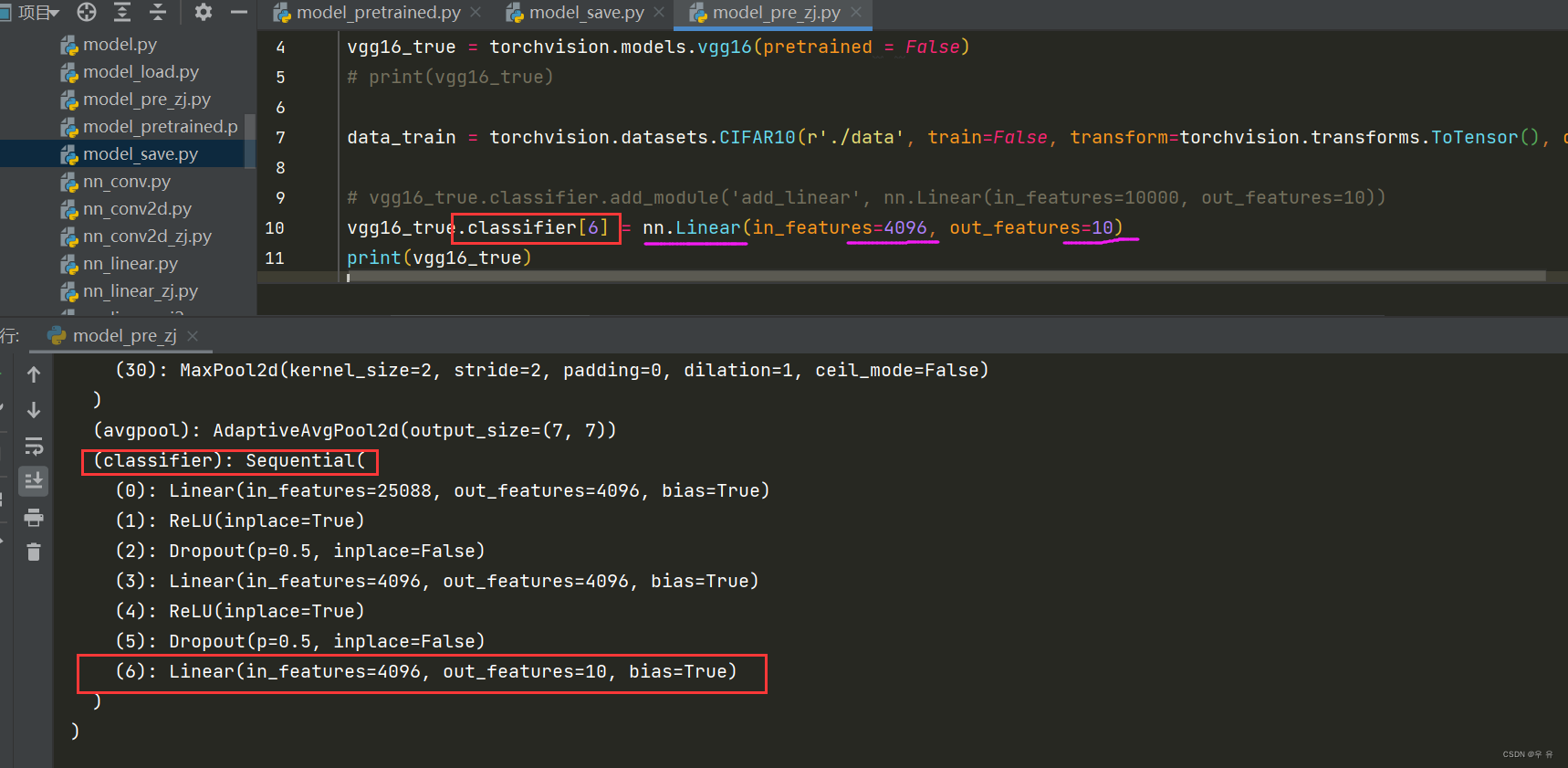
可以发现得到的是1000个分类,但是如果想要把预训练运用到CIFAR10分类就需要修改。(如果预训练设置为True还是会去下载权重,因为我只想看输出的变换,所以可以用pretrained为False直接进行修改就可以了,虽然vgg16预训练权重不算特别大):一种方法就是在最后添加一个线性层,从10000->10;另一种使用线性层直接将第七层([6]因为从0开始)直接改成in_f=4096, out_f=10
然后就是要对我们训练的模型的权重.pth文件进行保存
保存方式1:模型结构+模型参数 torch.save(model,"路径名称")、torch.load("路径名称")
save文件
load文件
方式1陷阱:
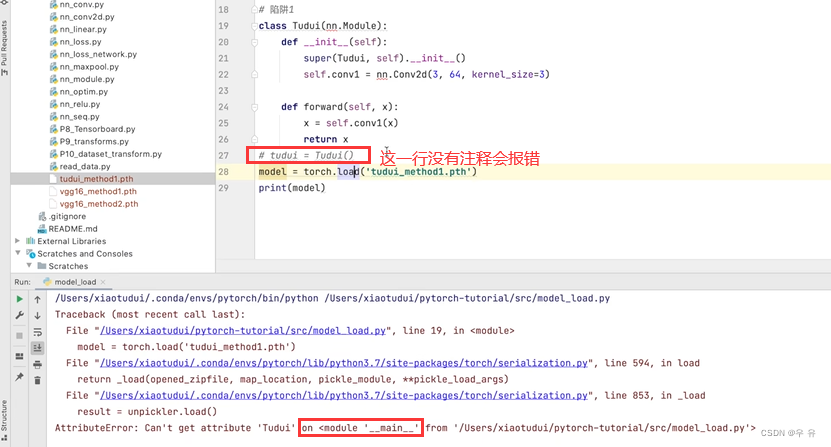
改了一下:(torch版本不同会有一些不同)

保存方式2:模型参数 直接import模型 从save文件中(up的vgg16,我的model)
save文件 pth小
load文件
4、完整的模型训练套路(以CIFAR10数据集)
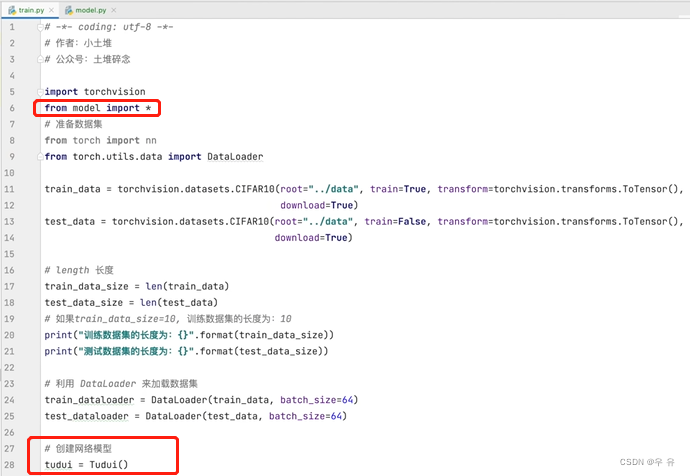
模型:model.py【train中记得from model import *】
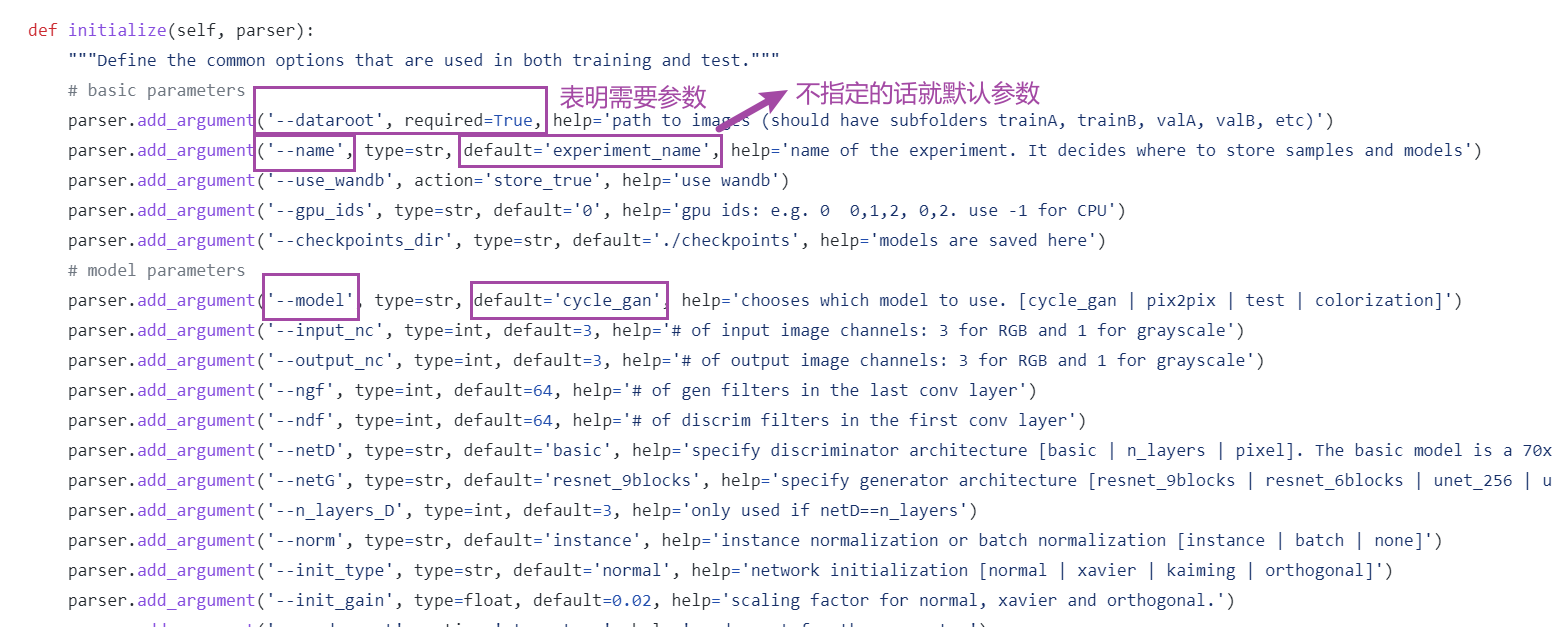
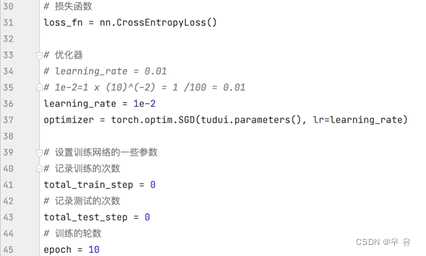
训练过程:train.py 首先train/test数据集 => dataloader加载数据 => 创建网络模型 => 损失函数、优化器 、设置网络中的参数(训练次数、测试次数、训练轮数) => main主函数中写训练过程
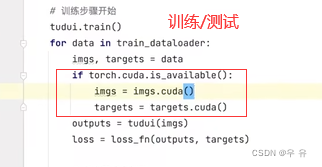
tudui.train()进入训练状态 => for从dataloader中不断取数据,并计算loss => 将loss送入优化器中进行优化 => 采用特定方式对结果进行输出设置(比如train-step%100输出loss和add_scalar绘图)
tudui.eval()进入验证/测试状态 对网络进行验证/测试 => 建议设置with torch.no_grad(): 因为验证不需要梯度调整和优化 =>计算loss和误差等 => 展示
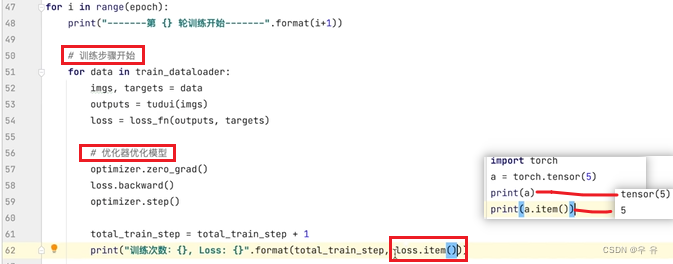
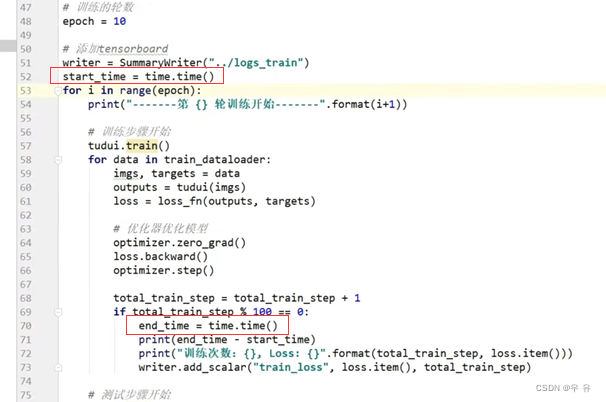
在此基础上对代码进行完善,比如训练100次输出loss,保存每个epoch的pth,tensorboard可视化中间loss,计算准确率,with torch.no_grad():测试的时候,就不要梯度变化和调优了
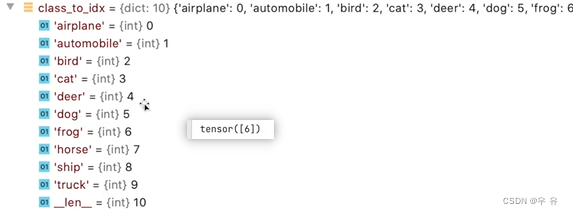
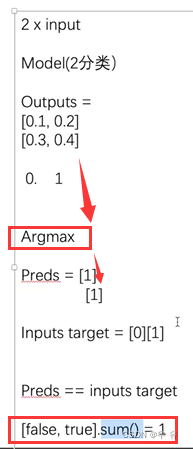 argmax(0-纵向 1-横向;对应大概率类别的下标位置)
argmax(0-纵向 1-横向;对应大概率类别的下标位置)
然后对于训练代码中的tudui.train()和tudui.eval()声明进入某种模式,对特定的比如Droupout、BatchNorm等特定层使用时要调用(使用这些层的时候声明一下)

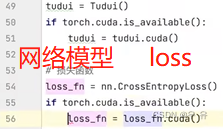
使用GPU进行训练
方式1: 找到↓三个参数,然后.cuda()返回就可以了
import time计时小工具= time.time()
谷歌Colaboratory、Kaggle、
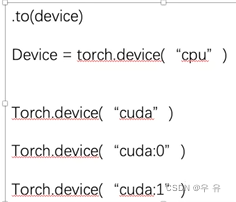
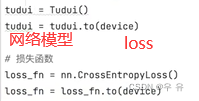
方式2:在一开始定义训练的设备torch.device("xxx") 说明:使用该方法不需要对网络和Loss进行另外赋值,直接.to(device)就行;但是对于数据需要进行赋值操作。
![]()

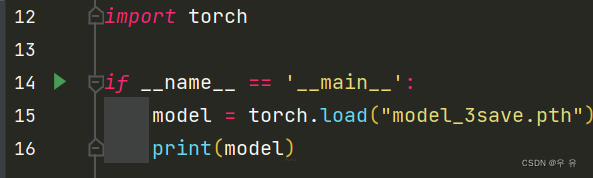
5、完整的模型验证(测试,demo)套路-利用已经训练好的模型,然后给它提供输入
1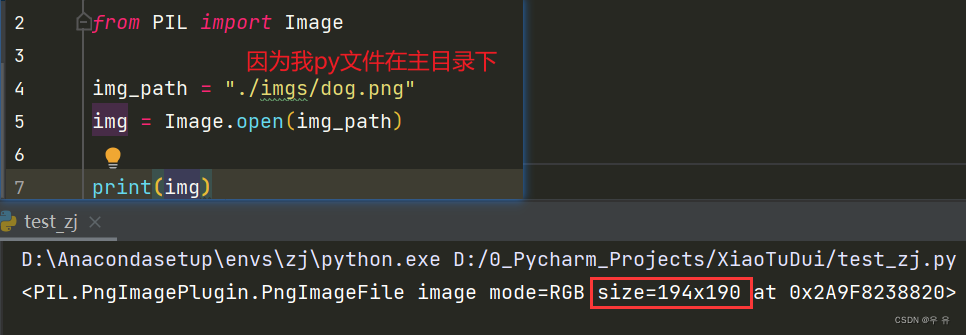
而我们写的网络要求32x32,所以需要进行resize操作,需要注意的是Resize之后是32x32,这作为Resize的整体的第一个参数,所以要括号,就是.Resize((32,32)其他参数)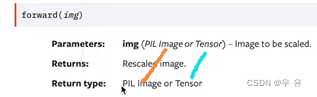
2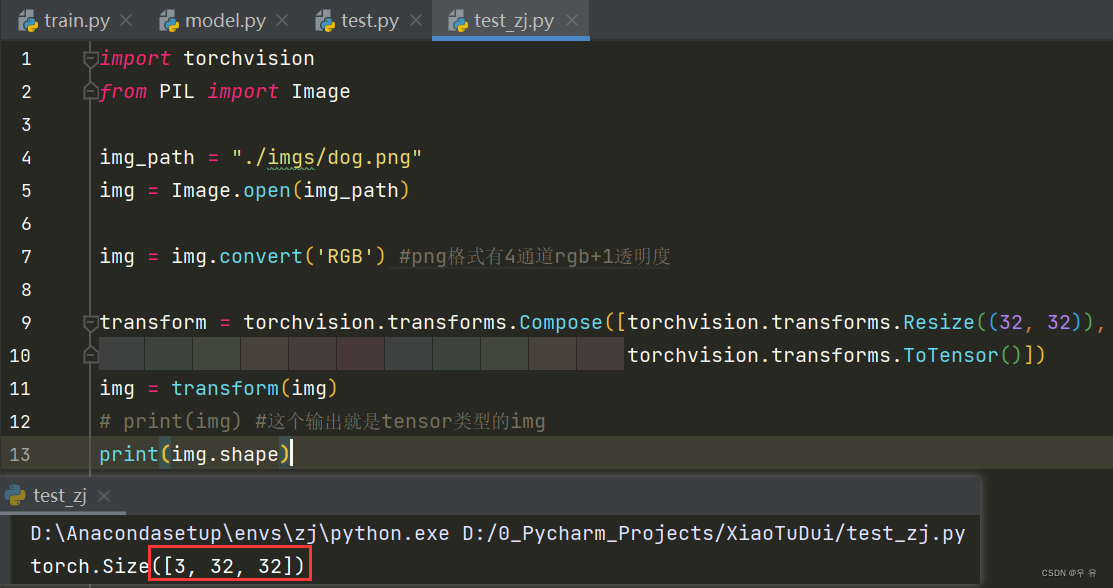
接下来就是加载网络模型
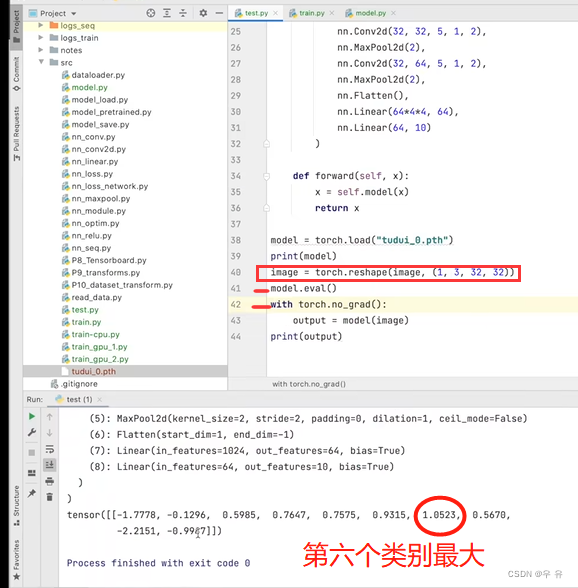
借助 .argmax(1)输出,预测不准确的原因是训练不足够(我自己这里是[5],换个飞机就错误了)
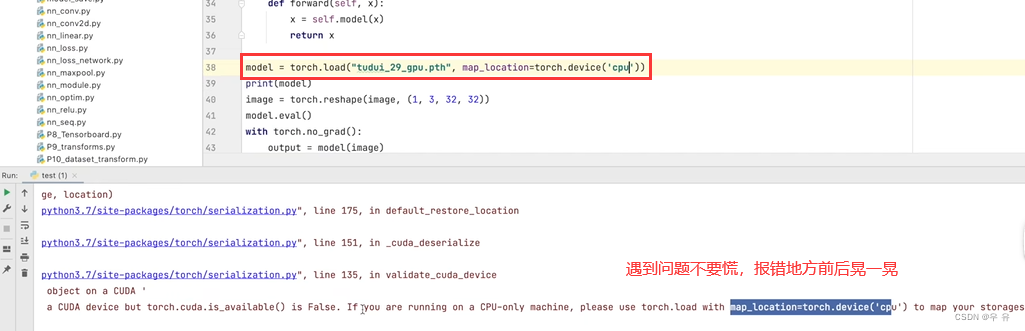
同时up演示了一种,从gpu中训练得到的pth在cpu中加载的时候会报错,需要对应到cpu上
3代码几个注意点:①注意使用的函数的输入/输出的格式和维度/尺寸(tensor/PIL/) ,如果不一致就使用Resize( (H , W ))和reshape(batchsize, C, H, W);②图片格式通道RGB;③在训练好的模型后进行验证或测试时,使用model.eval()和with torch.no_grad:(网络中有Dropout和batchnorm);④最后就是得到的output是不同类别的概率,借助argmax(1)变成利于阅读的类别下标
import torch
import torchvision
from PIL import Image
from torch import nnimg_path = "./imgs/dog.png"
# img_path = "./imgs/airplane.png"
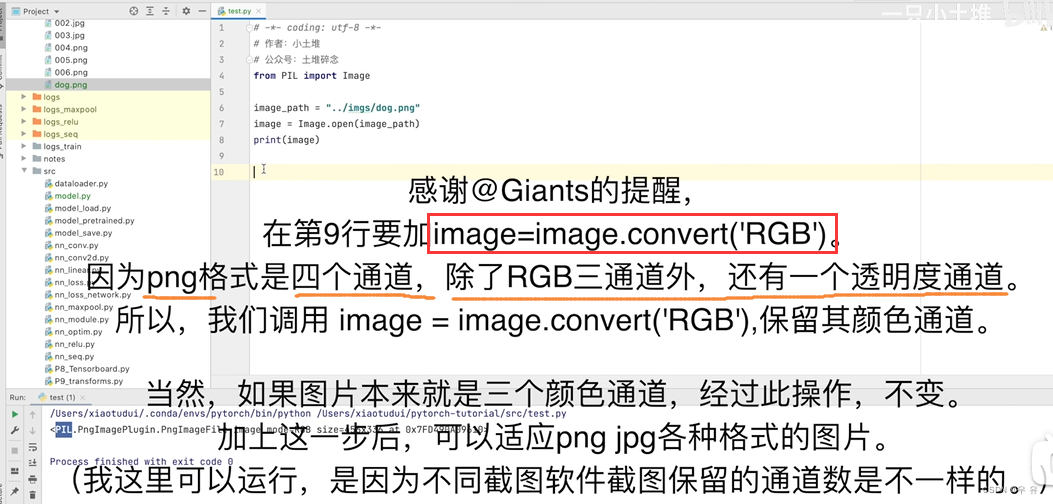
img = Image.open(img_path)img = img.convert('RGB') #png格式有4通道rgb+1透明度 ☆★transform = torchvision.transforms.Compose([torchvision.transforms.Resize((32, 32)),torchvision.transforms.ToTensor()])
img = transform(img)
# print(img) #这个输出就是tensor类型的img
# print(img.shape)#加载网络模型
class SUNDAY(nn.Module):def __init__(self):super(SUNDAY, self).__init__()self.model = nn.Sequential(nn.Conv2d(3, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, 1, 2),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(64*4*4, 64),nn.Linear(64, 10))def forward(self, x):x = self.model(x)return xmodel = torch.load("tudui_0.pth")
# model = torch.load("tudui_29_gup.pth",map_location=torch.device("cpu"))
# print(model)
img = img.reshape(1, 3, 32, 32) # 注意尺寸和维度☆★model.eval() # 这两行是为了养成良好的代码习惯when网络中dropout/BatchNorm☆★
with torch.no_grad():output = model(img)output = output.argmax(1) # 转换成利于解读的方式☆★
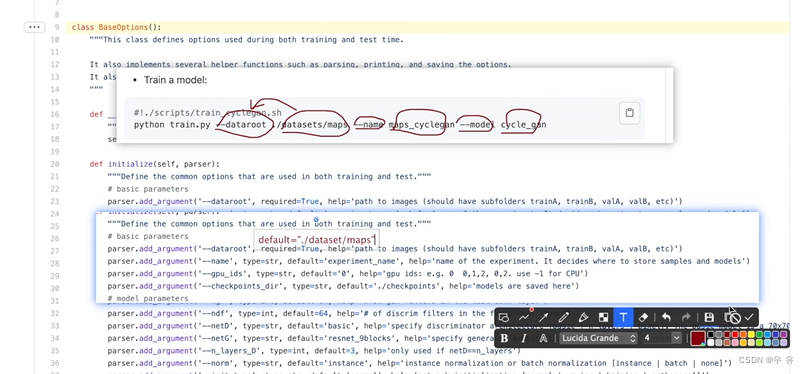
print(output)最后讲解了一下命令行run()注意一下路径和数据集是否正确
谢谢小土堆!



【唐宇迪】
学一个算法、读一篇论文、啃一个源码
积累二三十个,面向复制粘贴编程,创新点就来了;
CV: ctrl+C、ctr+V
在理解完源码和论文之后,从源码中去积累
论文读再多不如debug一遍收获的多;
大同小异 看不懂论文、看不懂网络、看不懂代码 => 积累的不够呀
Day1: 深度学习CNN卷积神经网络算法精讲
1. 神经网络模型知识点分析
2. 神经网络模型架构解读
3. 卷积神经网络整体架构及参数设计
Day2:AI领域最火模块transformer实例解读
1. 深度学习CNN卷积神经网络算法精讲
2. 当下最火模块注意力机制解读
3. 视觉领域transformer应用实例
4. 视觉当下最新研究方向与进展 两天的内容一样重要
【预习视频Day1】
transform:数据增强
.ToTensor():无论图像是用啥工具读取进来的都要转换成tensor格式[张量-矩阵] [Numpy-array]
.Normalize()标准化
batch:一次做八题,一次送几张
Dataloader:
dataset.ImageFolder
resnet:至少不比原来差
VGG:大量3x3卷积堆叠(16/19层):随着网络结构加深,56layer比20效果变差
model_name=’resnet’ 迁移学习/预训练模型(都用现成的)
遍地都是预训练模型(做好搬运工 抄作业记得不要把名字也抄上了啊喂 | 自己的输出修改 )
迁移学习:
data少:
冻住前几层-提取特征:用别人的预训练模型权重不做改动
越往右面越接近输出层,做自己的分类任务
data多:少冻几层
优化器设置:
学习率lr:权重参数更新幅度
变化幅度:一开始幅度大一点没事,后面接近答案不可以一步子跨过终点,所以后面lr要小一点
学习率衰减策略:lr经过多少step衰减成原来的几分之几
训练模块:
1000个样本,batch=100样本,1epoch表示把整个数据集都遍历一遍
∴1epoch=10batch,即1epoch迭代10次,每次迭代10batch
#训练(更新参数)和验证(期末考试)if train if val
前向传播要计算loss、_preds=torch.max(outpts,1)要得到当前预测各类别的最大概率
backwards反向传播(框架已实现)w更新
#计算损失与打印操作
指标:accuracy、val_loss
加载训练好的模型:
保存好训练好的模型、制定好路径
需要保证所有输入数据的大小规格保持一致,训练的时候多大 测试的时候也要多大
制作好数据源:input-transform=224x224
所以在测试时候,要先处理数据:
def process_image(image_path):# 读取测试数据img = Image.open(image_path)# Resize,thumbnail方法只能进行缩小,所以进行了判断if img.size[0] > img.size[1]:img.thumbnail((10000, 256))else:img.thumbnail((256, 10000))# Crop操作left_margin = (img.width-224)/2bottom_margin = (img.height-224)/2right_margin = left_margin + 224top_margin = bottom_margin + 224img = img.crop((left_margin, bottom_margin, right_margin, top_margin))# 相同的预处理方法img = np.array(img)/255mean = np.array([0.485, 0.456, 0.406]) #provided meanstd = np.array([0.229, 0.224, 0.225]) #provided stdimg = (img - mean)/std# 注意颜色通道应该放在第一个位置img = img.transpose((2, 0, 1))return img【transformer Day2】
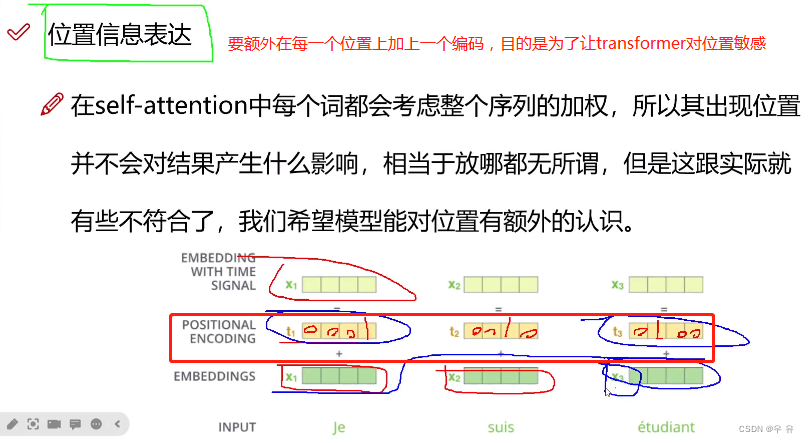
文本的例子->图像的例子
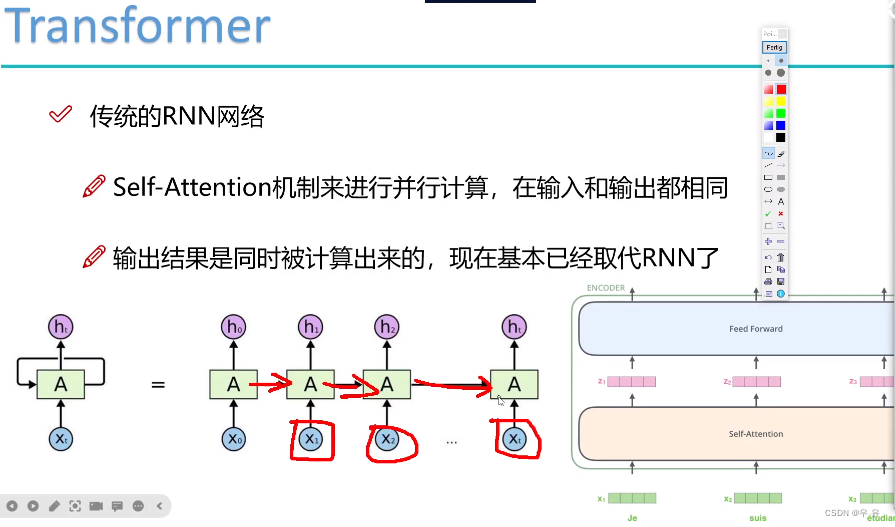
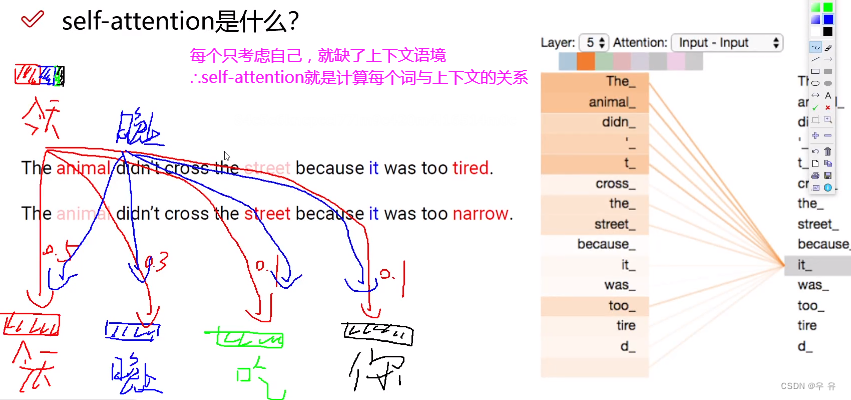
之前的算法谁离我近我就考虑谁,比如这里x2考虑x1最多,但是并不一定是最接近的就是最重要的/关系紧密的,是要考虑上下文语境的。
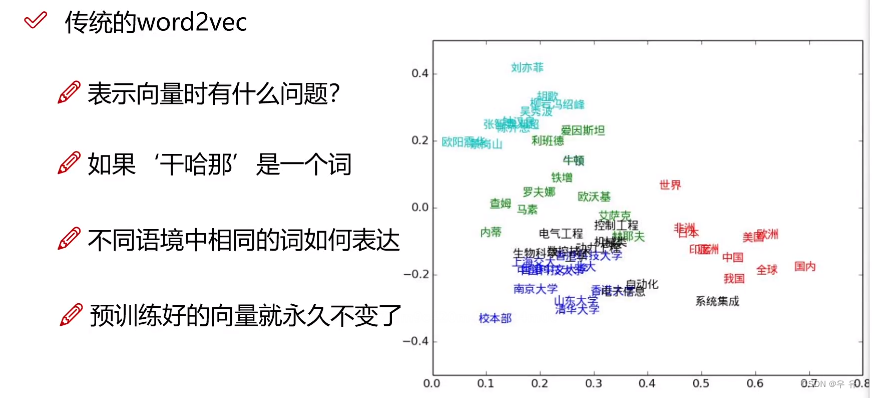
同一个词语在不同的语境中表示的意思是有所区别的 => 关注一个词,同时考虑上下文信息
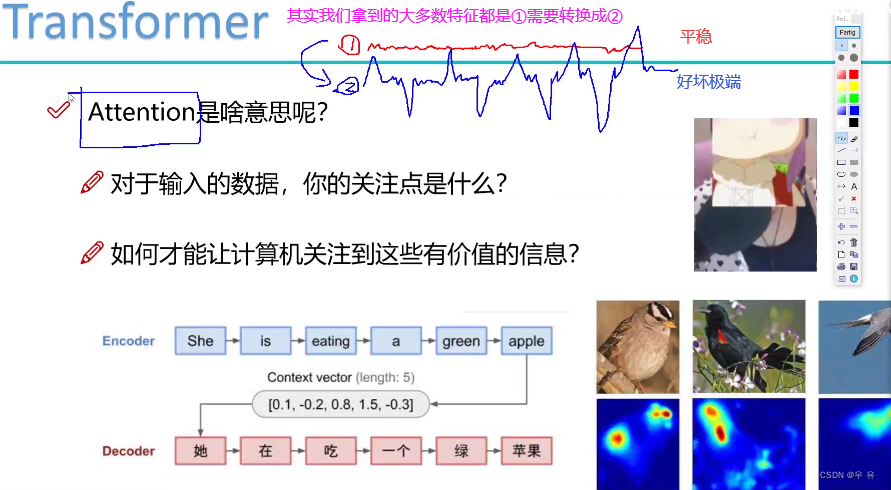
注意力机制做的事情:把平稳特征转换成层次分明
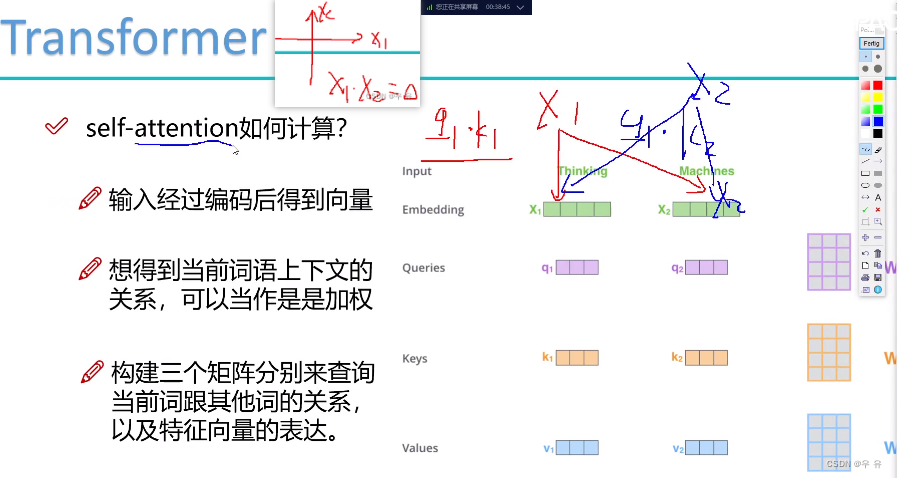
引入三个辅助向量:Q(由这个词出发去问别人)、K(被问到的时候要回答的)、V,那怎么用Query和Key衡量词与词之间的上下文的关系呢?
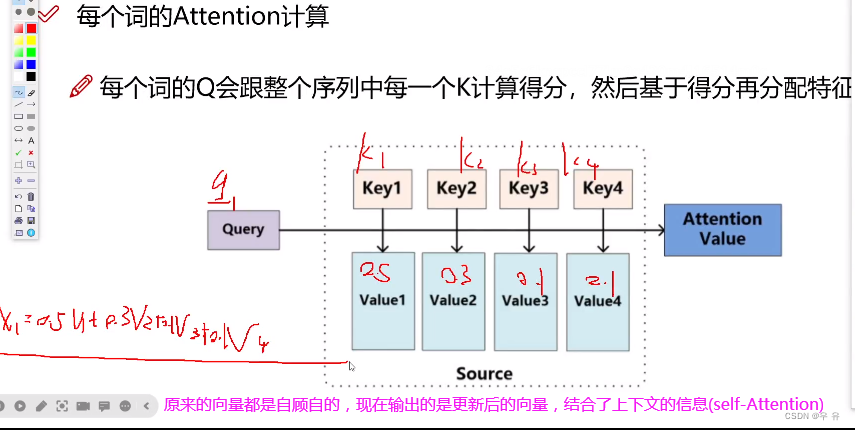
向量之间内积越小关系越差;向量之间内积越大关系越好。
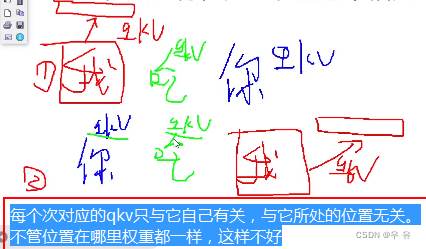
由谁出发提供一个Query向量,谁被问到要提供一个key向量。所以x1访问x1就是q1`k1、x1访问x2就是q1`k2,所以这里要做的就是权重赋值,多少给x1多少给x2
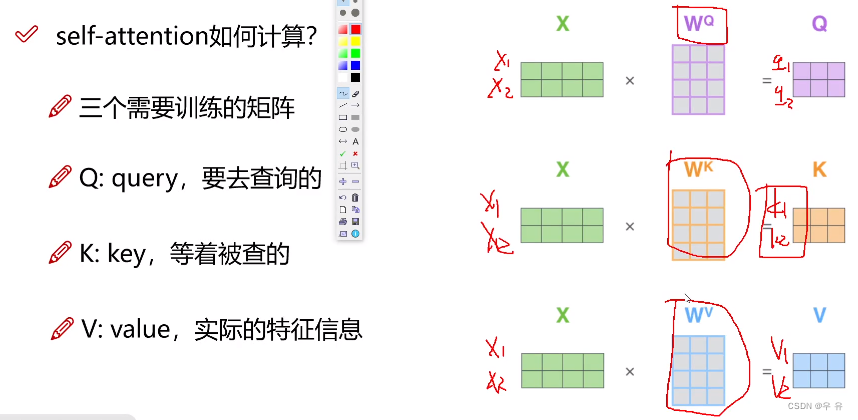
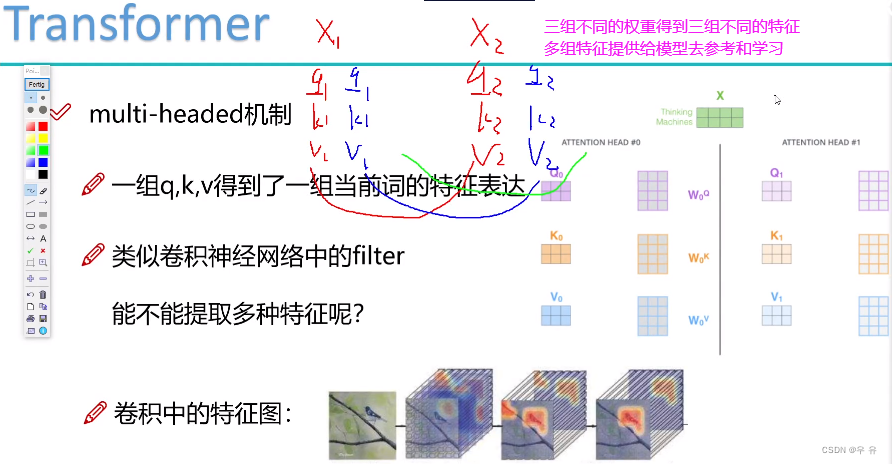
原始输入只有x1,x2,怎么得到QKV?通过训练得到kqv:用三组权重参数矩阵,分别训练得到三组权重向量QKV
输入序列中的每一个token都有qkv
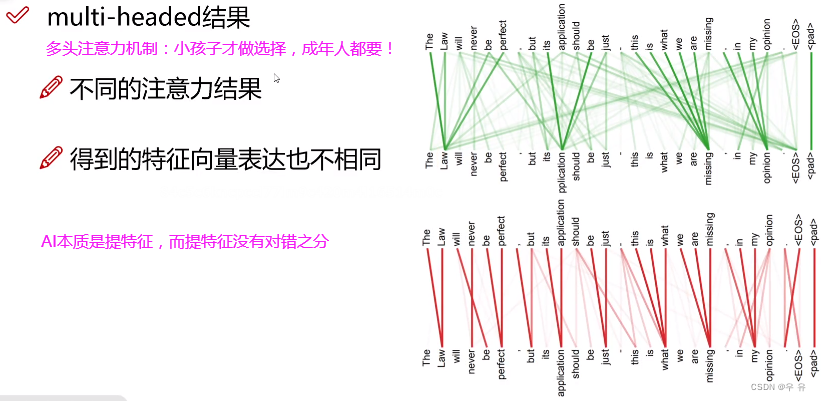
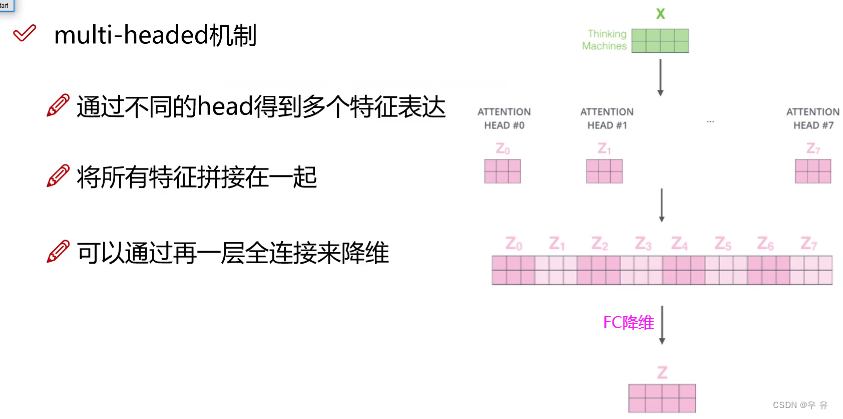
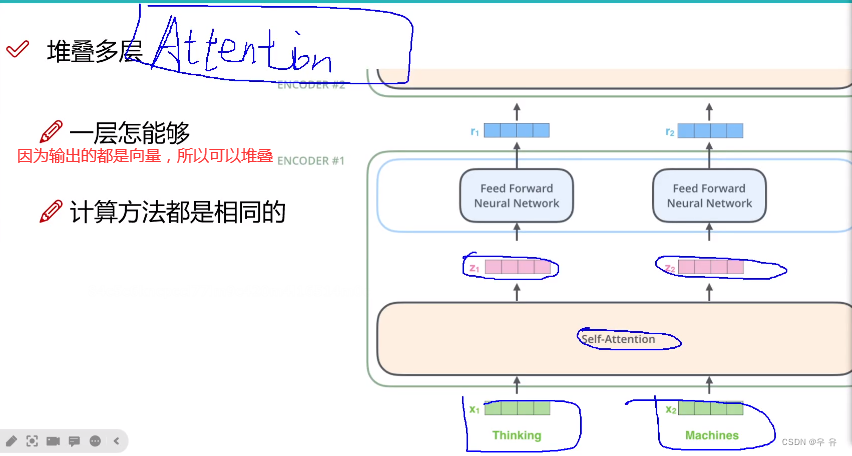
multi-headed多头注意力机制:
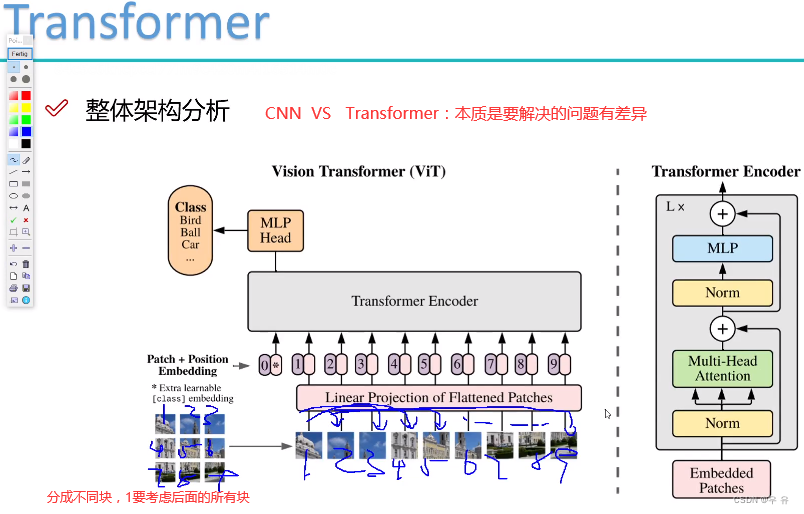
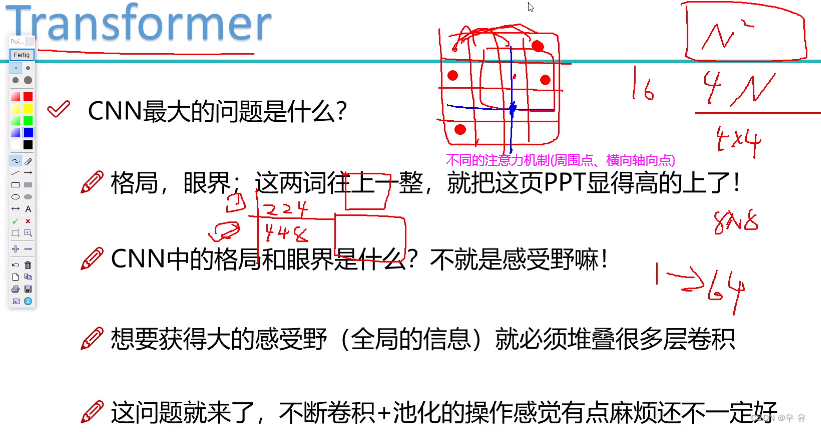
CNN vs Transformer
Transformer优点:三个臭皮匠顶上诸葛亮;
缺点:每个点与其他点都要计算很慢,且input大效果好但是特征多也复杂;同时一个点真的需要跟所有的点都要求他们之间的关系呢?=>不同的注意力机制(周围点、横向轴向点)=>现在transformer都在解决的一个问题是怎么简化计算。
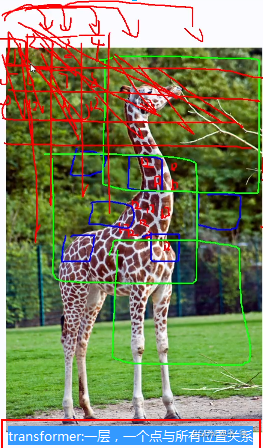
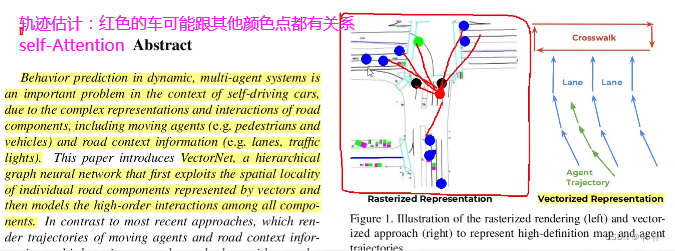
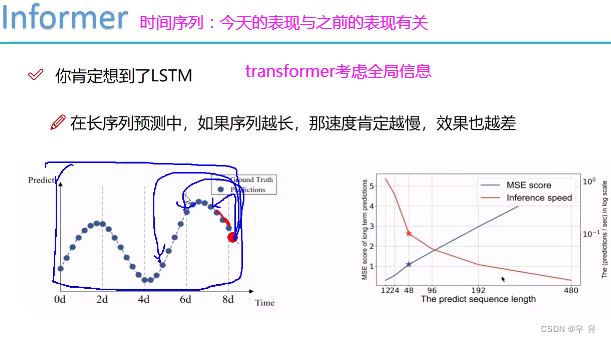
transformer的应用:物体检测、轨迹估计、时间序列、 关键点匹配

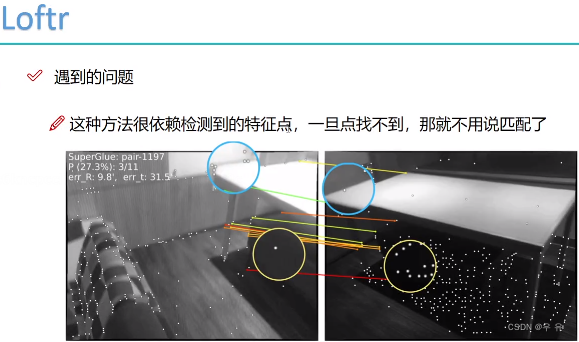
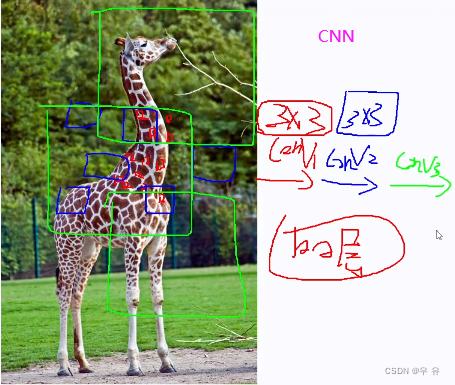
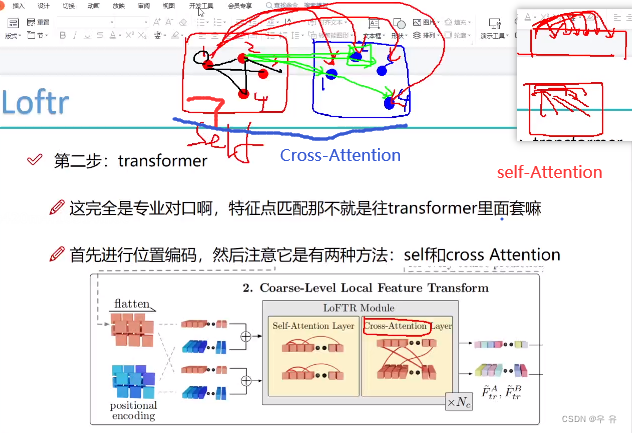 自注意力机制:一张图片中点与这张图中其他点之间的位置关系;CrossAtention跨图片
自注意力机制:一张图片中点与这张图中其他点之间的位置关系;CrossAtention跨图片

![[零基础][最简单的教程]图像多分类问题的解决——基于resnet50的pytorch的实现](https://img-blog.csdnimg.cn/20210316012431738.png)