本文为挪威科技大学(作者:Vegard B Hammerseth)的硕士论文,共212页。
本报告介绍了一种使用自主无人机加强搜救行动的方法,并采取了使该系统投入使用的第一步。通过使用无人驾驶飞机,救援人员需要的经验更少,无人机专家可以在这方面介入更进一步的工作。由于自主性,无人机可以在有效的无线电链路外工作。因此,当信号丢失时,飞行器可以继续搜索、缓冲信息,并在链接激活时发送获取的信息。通过设计制造负担得起的无人机,降低了在恶劣天气或其他任务中部署的门槛,在这些任务中,信息反馈比无人机返回更为重要。
因为无人机必须搜索很大的面积,所以需要设计最合适的机身。为了减少阻力、增加稳定性,建议使用细长且薄的机翼。为了获得气动稳定性,还建议采用无后掠机翼和较小的正二面角。机翼应该安装在一个尽可能细长的机身上。然而,由于着陆困难和与此相关的弱点,一个符合设计要求的飞行机翼可能是更好的选择。将膨胀聚丙烯制成的机翼样机组装在一起并进行了试验。这种材料被证明是有弹性的,能够承受严重的滥用,并迅速恢复到原来的结构形式,同时可以在几分钟内得到快速修复,非常方便各种着陆区域。
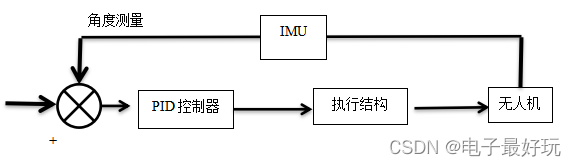
需要姿态和航向参考系统(AHRS)来确定飞行器的方位。一个负担得起的设计已经实现了,该型号使用微机电传感器和微控制器。由于飞行器必须在搜索区域内自行定位,因此,NAVSTAR全球定位系统(GPS)和无人机的航路点进近已被预先编程为一条跟随路径,并与一个完整的飞行系统同时开发。无人机搜索路径必须由救援人员从给定的搜索区域自动编程,这需要软件实现地面站与无人机之间的主动通信链路。
一个直观的图形用户界面已经开发出来,并通过在程序中标记一个区域,以商业通信链路将坐标发送到一个无人机原型来验证其工作。热成像相机可以用来探测人类,检测环境中哺乳动物产生的图像(热图)。当达到设定的阈值时,可以将坐标通知操作员。我们将试验者放在已知的坐标系下进行实验,一架装有自动定位设备的无人机被反复投送到试验者上方,自动定位并报告其位置。据推断,无人机位于该试验者半径20米以内。机身、AHRS、视觉系统的通用性和可承受性在未来几年对大学是有用的,因此实现使用这些系统的应用门槛已经降低。像这样一种基于无人驾驶飞机的系统可以通过节省时间、金钱、生命来加强搜索和救援,并帮助到大多数人。
This report presents a way of usingautonomous drones to enhance search and rescue operations and takes the firststeps in bringing the system to life. By using autonomous drones, lessexperience is required by the rescue personnel and drone specialists becomeexcessive in this matter. Due to autonomy a drone can operate outside a validradio link. Hence, when signal is lost, the craft can continue to search,buffer the information and send it when the link becomes active. By creatingaffordable drones the threshold decreases for deploying a unit in bad weatheror other missions where the feedback is more important than drone return.Because the drones must sweep a large area, an aeroplane is the best suitableairframe. To generate less drag and increase stability; long, slender andthinas-possible wings are recommended. To achieve aerodynamic stability,non-swept wings and a small positive dihedral angle is also advised. The wingsshould be attached on top of a slender and small-as-possible fuselage. However,due to the difficulties in landing and vulnerabilities related to this, aflying wing which obey the same design requirements, may be a better choice. Aprototype for a flying wing made in expanded polypropylene was put together andtested. It proved to be resilient, able to withstand significant abuse, quicklyrecover to its former structure and be repaired in minutes. Highly convenientfor various landing areas. An attitude and heading reference system (AHRS) isrequired to tell which orientation a vehicle may have. An affordable versionhas been realised by using micro electro mechanical sensors and a microcontroller. Since the vehicle must orient itself within a search area, aNAVSTAR Global Positioning System (GPS) and way-point approach were drones arepre-programmed to follow a path has been developed together with a completeflight system. The drones search path must be programmed automatically from thegiven search area by the rescue personnel. This requires software and activecommunication link between a ground station and drones. An intuitive graphicaluser interface has been developed and verified to work by marking an area inthe program and send coordinates over a commercial communication link to aprototype drone. A thermal imaging camera can be used to detect humans. It willmake mammals stand out in an environment when viewed in the produced image(thermogram). Together with an arbitrarily threshold limit, the operators canbe notified with coordinates when the threshold is reached. An experiment wascarried out by placing a human at known coordinates. A drone with self positionequipment was sent over the human repeatedly, automatically locating the personand reporting its location. It was concluded that the drone would be within 20meters radius of the person. The generality and affordability of the airframe,AHRS and vision system can be useful for the university in the years ahead andthe threshold for realising applications which uses any of these systems hastherefore been reduced. A drone based system like this can enhance search andrescue and assist the majority by saving time, money and lives.
- 引言
- 机身与推进系统
- 姿态航向参考系统
- 导航
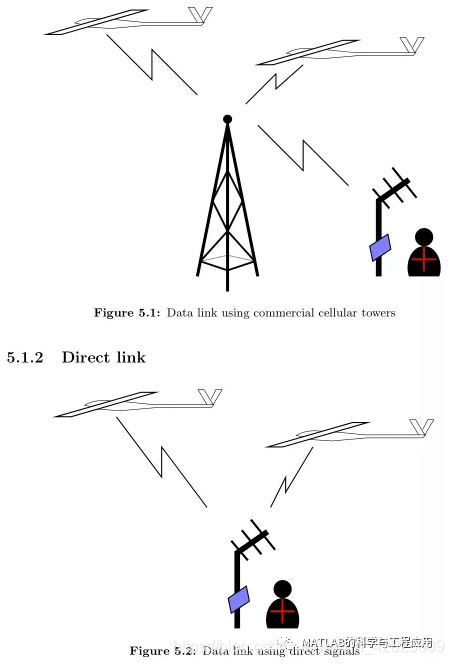
- 通信
- 飞行
- 系统融合
- 搜救控制中心
- 人类识别
-
讨论 -
未来工作展望 -
结论
附录A 完整接线方案
附录B 系统组成列表
附录C 如何烧写代码
附录D 如何配置搜救软件
附录E 光盘文件清单
更多精彩文章请关注公众号: