泰森多边形(Voronoi图)的matlab绘制——彩图版
1 Voronoi图简介
泰森多边形是对空间平面的一种剖分,其特点是多边形内的任何位置离该多边形的样点(如居民点)的距离最近,离相邻多边形内样点的距离远,且每个多边形内含且仅包含一个样点。由于泰森多边形在空间剖分上的等分性特征,因此可用于解决最近点、最小封闭圆等问题,以及许多空间分析问题,如邻接、接近度和可达性分析等。
泰森多边形的构建可以分为2个步骤,1是Delaunay三角网的构建,2是三角网格外接圆心得连线。
之前我有写过一篇文章,主要是泰森多边形的边缘绘制。内边的思路是根据每一个三角形的Delaunay三角网关系,去依次连接每个相邻三角形外接圆心得到。外边的思路是根据每个外接圆圆心和相应边缘做中垂线得到的。
参见:
泰森多边形(Voronoi图)的matlab绘制 https://blog.csdn.net/weixin_42943114/article/details/82319332
二维Delaunay三角网的绘制参见 https://blog.csdn.net/weixin_42943114/article/details/82262122
2 实心带色彩的Voronoi图实现思路
实心带色彩的Voronoi图主要是通过matlab里的patch()函数实现的。
具体用法可以参见matlab的官方帮助:https://ww2.mathworks.cn/help/matlab/ref/patch.html
其中本文最主要的用法是
patch('Faces',f,'Vertices',v,'FaceVertexCData',col,'FaceColor','flat');
v是一系列点矩阵,f是多边形对应的点的编号,col是多边形的颜色,取[0,1]。
根据前两篇文章里的算法,已知所有的初始点xdot,和已经构建关系的三角形网格。之后循环每一个初始点,依次连接点初始点周围三角形的外接圆心即可。
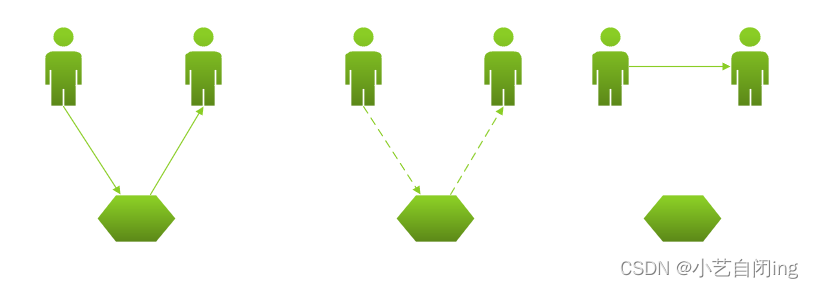
比如对于以下图形:
以点4为例,和点4相关的三角形依次为
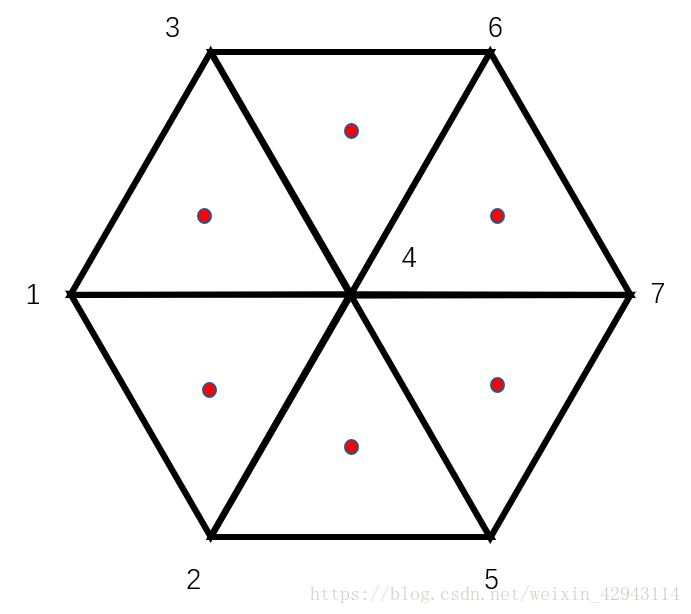
[4,3,1;
4,1,2;
4,2,5;
4,5,7;
4,7,6;
4,6,3;]
这些三角形,他们的外接圆圆心为红点所示。所以点4所对应的泰森多边形为这些红色点依次相连的对应的多边形:
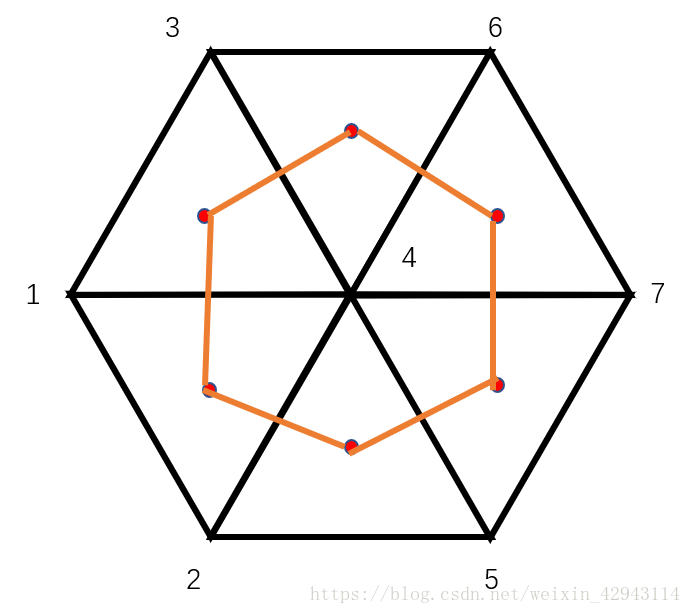
如果遇到边缘三角形,思路和上一篇文章相同,都是做边缘的延长线。和上一篇文章中惟一的不同就是,上一篇文章只需要得到线即可,所以延长线画到很远处就行;但是这里要求得到面,所以需要求延长线与边界的交点。这里做的是边缘延长线与边界的交点作为泰森多边形的一个顶点。
3 matlab代码以及得到的结果图
3.1 matlab自带的代码
%采用matlab自带的函数进行绘制
clear
xdot=gallery('uniformdata',[200 2],5);
%delaunay三角形
figure(1)
DT=delaunayTriangulation(xdot);
triplot(DT,'color','k')
%voronoi三角形
figure(2)
voronoi(xdot(:,1),xdot(:,2));
xlim([0,1])
ylim([0,1])
%绘制voronoi三角形彩色
figure(3)
[v,c]=voronoin(xdot); %不是voronoi是voronoin
xlim([0,1])
ylim([0,1])
for i = 1:length(c) patch(v(c{i},1),v(c{i},2),rand(1,1));
end
3.2 自编程实现代码
因为涉及到了之前的两篇文章的内容,所以代码看起来非常的冗长。其实这篇代码完全可以采用外部函数调用的方式做到很整洁,只需要多创立几个m文件把这段代码拆分即可。
%更改了3里面几个bug,
%1.结果要输出最终面的形式,添加Txdot
clear%0 设置初始点模块*********************************************************************************
N=400;
%点随机xdot=rand(N,2);
%点按圆形随机
% r=rand(N,1).^0.3;
% theta=rand(N,1)*2*pi;
% xdot=[r.*cos(theta)/2+0.5,r.*sin(theta)/2+0.5];
%点按双行随机
% x=rand(N,1);
% y=[randn(N/2,1)/5+0.5;randn(N/2,1)/5-0.5];
% y(y>1)=1;y(y<-1)=-1;
% y=(y+1)/2.1;
% xdot=[x,y];%点按规则矩形加抖动
% [X1,X2]=meshgrid(0:1/sqrt(N):1-1/sqrt(N));
% xdot=zeros(N,2);
% xdot(:,1)=X1(1:end)'+1/sqrt(N)/2*rand(N,1);
% xdot(:,2)=X2(1:end)'+1/sqrt(N)/2*rand(N,1);%点按随机三角加抖动
% NN=20;
% X1=[];X2=[];
% for j=1:NN
% if mod(j,2)==0
% X1=[X1;(0:1/NN/sqrt(3)*2:1-0/NN/sqrt(3)*2)'];
% X2=[X2;ones(length(0:1/NN/sqrt(3)*2:1-0/NN/sqrt(3)*2),1)*(j-1)/NN];
% else
% X1=[X1;(0:1/NN/sqrt(3)*2:1-1/NN/sqrt(3)*2)'+1/NN/sqrt(3)];
% X2=[X2;ones(length(0:1/NN/sqrt(3)*2:1-1/NN/sqrt(3)*2),1)*(j-1)/NN];
% end
% end
% N=size(X1,1);
% xdot=[X1+rand(N,1)*1.2/NN/sqrt(3),X2+rand(N,1)*1.2/NN/2];
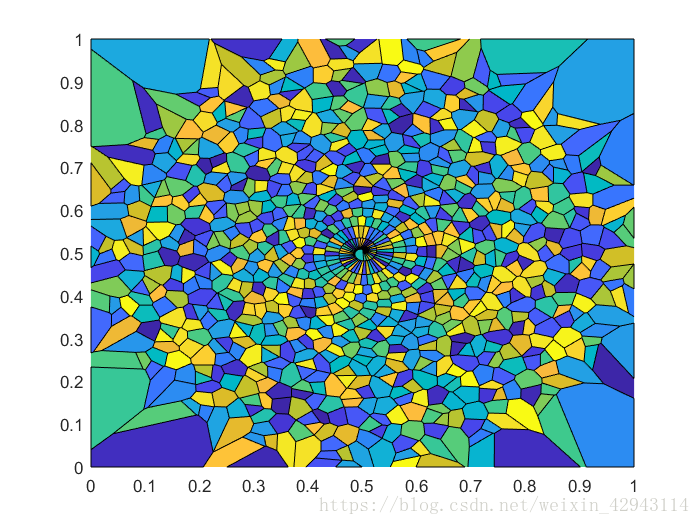
%点按圆形螺旋
r=0:1/500:1;
r=r.^0.7;
theta=0:0.1:500*0.1;
theta=theta.^1.3;
xdot=[(r.*cos(theta))'/2+0.5,(r.*sin(theta))'/2+0.5];
N=size(xdot,1);%1 Delaulay三角形的构建*******************************************************************************%整理点,遵循从左到右,从上到下的顺序
xdot=sortrows(xdot,[1 2]);%画出最大包含的三角形
xmin=min(xdot(:,1));xmax=max(xdot(:,1));
ymin=min(xdot(:,2));ymax=max(xdot(:,2));
bigtri=[(xmin+xmax)/2-(xmax-xmin)*1.5,ymin-(xmax-xmin)*0.5;...(xmin+xmax)/2,ymax+(ymax-ymin)+(xmax-xmin)*0.5;...(xmin+xmax)/2+(xmax-xmin)*1.5,ymin-(xmax-xmin)*0.5];xdot=[bigtri;xdot];%点集
edgemat=[1 2 xdot(1,:) xdot(2,:);...2 3 xdot(2,:) xdot(3,:);1 3 xdot(1,:) xdot(3,:)];%边集,每个点包含2个点,4个坐标值
trimat=[1 2 3];%三角集,每个三角包含3个点
temp_trimat=[1 2 3];
for j=4:N+3pointtemp=xdot(j,:);%循环每一个点deltemp=[];%初始化删除temp_trimat的点temp_edgemat=[];%初始化临时边for k=1:size(temp_trimat,1)%循环每一个temp_trimat的三角形panduan=whereispoint(xdot(temp_trimat(k,1),:),...xdot(temp_trimat(k,2),:),xdot(temp_trimat(k,3),:),pointtemp);%判断点在圆内0、圆外1、圆右侧2switch panduancase 0%点在圆内%则该三角形不为Delaunay三角形temp_edge=maketempedge(temp_trimat(k,1),temp_trimat(k,2),temp_trimat(k,3),j,xdot);%把三条边暂时存放于临时边矩阵temp_edgemat=[temp_edgemat;temp_edge];deltemp=[deltemp,k];;case 1%点在圆外,pass;case 2%点在圆右%则该三角形为Delaunay三角形,保存到trianglestrimat=[trimat;temp_trimat(k,:)];%添加到正式三角形中deltemp=[deltemp,k];%并在temp里去除掉%别忘了把正式的边也添加进去edgemat=[edgemat;makeedge(temp_trimat(k,1),temp_trimat(k,2),temp_trimat(k,3),xdot)];%遵循12,13,23的顺序edgemat=unique(edgemat,'stable','rows');end
% clf
% hold on
% plot(xdot(:,1),xdot(:,2),'ko')
% plot(pointtemp(:,1),pointtemp(:,2),'bo')
% for h=1:size(edgemat,1)
% plot([edgemat(h,3),edgemat(h,5)],[edgemat(h,4),edgemat(h,6)],'k-')
% end
% plot([xdot(temp_trimat(k,1),1),xdot(temp_trimat(k,2),1),xdot(temp_trimat(k,3),1),xdot(temp_trimat(k,1),1)],...
% [xdot(temp_trimat(k,1),2),xdot(temp_trimat(k,2),2),xdot(temp_trimat(k,3),2),xdot(temp_trimat(k,1),2)],'r-')
%
%
% hold off%三角循环结束 end%除去上述步骤中的临时三角形temp_trimat(deltemp,:)=[];temp_trimat(~all(temp_trimat,2),:)=[];%对temp_edgemat去重复temp_edgemat=unique(temp_edgemat,'stable','rows');%将edge buffer中的边与当前的点进行组合成若干三角形并保存至temp triangles中temp_trimat=[temp_trimat;maketemptri(temp_edgemat,xdot,j)];k=k;%点循环结束
end%合并temptri
trimat=[trimat;temp_trimat];
edgemat=[edgemat;temp_edgemat];
%删除大三角形
deltemp=[];
for j=1:size(trimat,1)if ismember(1,trimat(j,:))||ismember(2,trimat(j,:))||ismember(3,trimat(j,:))deltemp=[deltemp,j];end
end
trimat(deltemp,:)=[];
edgemat=[trimat(:,[1,2]);trimat(:,[2,3]);trimat(:,[3,1])];
edgemat=sort(edgemat,2);
edgemat=unique(edgemat,'stable','rows');temp_edgemat=[];
temp_trimat=[];% figure(1)
% hold on
% % plot(xdot(:,1),xdot(:,2),'ko')
% for j=1:size(trimat,1)
% plot([xdot(trimat(j,1),1),xdot(trimat(j,2),1)],[xdot(trimat(j,1),2),xdot(trimat(j,2),2)],'k-')
% plot([xdot(trimat(j,1),1),xdot(trimat(j,3),1)],[xdot(trimat(j,1),2),xdot(trimat(j,3),2)],'k-')
% plot([xdot(trimat(j,3),1),xdot(trimat(j,2),1)],[xdot(trimat(j,3),2),xdot(trimat(j,2),2)],'k-')
% end
% hold off
% xlim([0,1]);ylim([0,1]);%1.5 凸包监测****************************************************************************************
%思路是先找出边缘点(三角形只有1个或2个的),顺便整出一个三角形相互关系图,以后用。
%然后顺时针,依次隔一个点连接出一条线段,如果这个和之前的线段相交,则不算;如果不交,则记录出三角形
%更新完了以后,再监测一遍,直到没有新的为止。t_w=0;
while t_w==0[~,border_point,~]=makebordertri(trimat);border_point=[border_point;border_point(1,:)];temp_edgemat=[];temp_trimat=[];for j=1:size(border_point,1)-1tempboderedge=[border_point(j,1),border_point(j+1,2)];tempboderdot=border_point(j,2);%寻找带tempboderdot的所有边tempdotex=edgemat(logical(sum(edgemat==tempboderdot,2)),:);%删除相邻边tempdotex(ismember(tempdotex,[tempboderdot,tempboderedge(1)],'rows'),:)=[];tempdotex(ismember(tempdotex,[tempboderedge(1),tempboderdot],'rows'),:)=[];tempdotex(ismember(tempdotex,[tempboderdot,tempboderedge(2)],'rows'),:)=[];tempdotex(ismember(tempdotex,[tempboderedge(2),tempboderdot],'rows'),:)=[];%检测tempdotex是否为空,如果是证明不用相连t_N=size(tempdotex,1);t_t=0;if t_N>0%依次检测是否相交,只要有一个相交就不算;如果都不想交,则相连for k=1:t_Nif tempdotex(k,1)==tempboderdott_xdotno4=tempdotex(k,2);elset_xdotno4=tempdotex(k,1);endtt_xdotno4=xdot(t_xdotno4,:)-xdot(tempboderdot,:);xdotno4=xdot(tempboderdot,:)+tt_xdotno4/sqrt(sum(tt_xdotno4.^2))*(sqrt((xmax-xmin)^2+(ymax-ymin)^2));panduan=crossornot(xdot(tempboderedge(1),:),xdot(tempboderedge(2),:),xdot(tempboderdot,:),xdotno4);if panduan==1t_t=t_t+1;breakendend%t_t大于0说明有相交的线,略过if t_t==0temp_edgemat=[temp_edgemat;tempboderedge];temp_trimat=[temp_trimat;[tempboderedge,tempboderdot]];breakendendendtrimat=[trimat;temp_trimat];edgemat=[edgemat;temp_edgemat];%删除重复的三角形trimat=sort(trimat,2);trimat=unique(trimat,'stable','rows');if j==size(border_point,1)-1t_w=1;end
endfigure(2)
hold on
% plot(xdot(:,1),xdot(:,2),'ko')
for j=1:size(trimat,1)plot([xdot(trimat(j,1),1),xdot(trimat(j,2),1)],[xdot(trimat(j,1),2),xdot(trimat(j,2),2)],'k-')plot([xdot(trimat(j,1),1),xdot(trimat(j,3),1)],[xdot(trimat(j,1),2),xdot(trimat(j,3),2)],'k-')plot([xdot(trimat(j,3),1),xdot(trimat(j,2),1)],[xdot(trimat(j,3),2),xdot(trimat(j,2),2)],'k-')
end
hold off
xlim([0,1]);ylim([0,1]);%2 泰森多边形的建立步骤 ******************************************************************************
%求每个三角形的外接圆圆心trimatcenter=zeros(size(trimat,1),2);
for j=1:size(trimat,1)[a,b,~]=maketricenter(xdot(trimat(j,1),:),xdot(trimat(j,2),:),xdot(trimat(j,3),:));trimatcenter(j,:)=[a,b];
end
hold on
scatter(trimatcenter(:,1),trimatcenter(:,2),5,[0.6,0,0],'filled')
hold off%求三角形的相邻三角形个数
[border_trimat,border_point,trimat_con]=makebordertri(trimat);
Thi_edge1=[];
for j=1:size(trimat,1)tempedge=[];%第一个相邻三角形if trimat_con(j,1)~=0tempedge=[tempedge;[j,trimat_con(j,1)]];end%第二个相邻三角形if trimat_con(j,2)~=0tempedge=[tempedge;[j,trimat_con(j,2)]];end%第三个相邻三角形if trimat_con(j,3)~=0tempedge=[tempedge;[j,trimat_con(j,3)]];endThi_edge1=[Thi_edge1;tempedge];
end%绘制非边缘泰勒多边形
figure(3)
Thi_edge1=unique(Thi_edge1,'stable','rows');
xlim([0,1]);ylim([0,1]);
hold on
for j=1:size(Thi_edge1,1)plot(trimatcenter([Thi_edge1(j,1),Thi_edge1(j,2)],1),trimatcenter([Thi_edge1(j,1),Thi_edge1(j,2)],2),'color',[0,0.4,0])
end%绘制边缘泰勒多边形
%先逐个边试探,如果中心点在三角内,则做中心-边缘延长线
%如果中心点在三角外,如果在屏幕外,忽略,如果在屏幕内,做边缘-中心延长线for j=1:size(border_point,1)%先找到边对应的三角temp_trimat=border_trimat(sum(border_trimat==border_point(j,1),2)+sum(border_trimat==border_point(j,2),2)==2,:);%判断中心点是否在三角形内[t_x1,t_y1,~]=maketricenter(xdot(temp_trimat(1),:),xdot(temp_trimat(2),:),xdot(temp_trimat(3),:));%求中心panduan=pointintriangle(xdot(temp_trimat(1),:),xdot(temp_trimat(2),:),xdot(temp_trimat(3),:),[t_x1,t_y1]);%求边的中点t_x2=(xdot(border_point(j,1),1)+xdot(border_point(j,2),1))/2;t_y2=(xdot(border_point(j,1),2)+xdot(border_point(j,2),2))/2;if panduan==1%做中心-边缘的延长线%这里用到了边缘在01这个条件t_xy3=[t_x1,t_y1]+[t_x2-t_x1,t_y2-t_y1]*sqrt(2)/sqrt((t_x2-t_x1)^2+(t_y2-t_y1)^2);plot([t_x1,t_xy3(1)],[t_y1,t_xy3(2)],'color',[0,0.4,0])elseif ~(t_x1<0||t_x1>1||t_y1<0||t_y1>1)%判断点是否在边与边框的三角内,如果在,做中心的延长线%如果不在,做中心-边缘的延长线%或者改成判断点是否在多边形内t_t=pointinmutiangle(xdot,[border_point(1,1);border_point(:,2)],[t_x1,t_y1]);if t_t==1t_xy3=[t_x1,t_y1]+[t_x2-t_x1,t_y2-t_y1]*sqrt(2)/sqrt((t_x2-t_x1)^2+(t_y2-t_y1)^2);plot([t_x1,t_xy3(1)],[t_y1,t_xy3(2)],'color',[0,0.4,0])elset_xy3=[t_x1,t_y1]+[t_x1-t_x2,t_y1-t_y2]*1/sqrt((t_x2-t_x1)^2+(t_y2-t_y1)^2);plot([t_x1,t_xy3(1)],[t_y1,t_xy3(2)],'color',[0,0.4,0])endend
endscatter(xdot(:,1),xdot(:,2),5,[0,0.4,0],'filled')
hold off%第3部分 多边形面的识别****************************************************************************
%1先规划出多边形预设矩阵(找出xdot数组中出现次数最多的数),行个数等于三角形外接圆中心点的个数
%2选取中心点,然后依次找出一圈三角形(共点),之后依次连接这一圈三角形的外接圆就是泰森多边形
%3对于边缘点,要结合边缘考虑,画出边缘线和延长射线的交点,就是了。还是依次画出,如果点在边缘外,就忽略,在边缘内,就记录。
%4选取上一步记录的三角形最外侧三角,做中垂线%初始化面% load('color_Sky02_h.mat')figure(4)
% colormap(mycolor)
xlim([0,1]);ylim([0,1]);
%依次根据xdot来循环
for j=4:size(xdot,1)%trimatcenter[temp_trimat,temp_trimat_no,panduan]=findpoint2tri(j,trimat);%找出这一圈三角形if panduan%直接把temp_trimat_no的点当做泰森多边形即可patch('Faces',temp_trimat_no,'Vertices',trimatcenter,'FaceVertexCData',rand(1,1),'FaceColor','flat');'hyh';else%需要做边缘化处理%如果最终三角形不是边缘三角形,要注意不能适用内外部延长的准则,要用连接法则%选出中心点在边界内的一圈三角形[temp_trimat,temp_trimat_no,delleft,delright]=selecttemp_trimat(temp_trimat,temp_trimat_no,trimatcenter);t_t=1;% 如果selecttemp_trimat删除了边上的点,那么做边缘延长线的话就用和删除点之间作为连线,和边相交即可%即如果delleft,delright=0,照旧。如果不是0,利用temp_trimat_no(1)和delleft做连线(创建一个公式)tempboderedge=trimatcenter(temp_trimat_no,:);%边缘延长线1if delleft==0tempedge=temp_trimat(1,[1,2]);tempboderdot1=edgepointfind(tempedge,xdot,trimatcenter(temp_trimat_no(1),:),border_point);%获取边缘点if size(tempboderdot1,1)==0t_t=0;%边缘点超出,不再画面endelsetempboderdot1=edgepointfind2(trimatcenter(temp_trimat_no(1),:),trimatcenter(delleft,:));endtempboderedge=[tempboderdot1;tempboderedge];%边缘延长线2if delright==0tempedge=temp_trimat(end,[1,3]);tempboderdot2=edgepointfind(tempedge,xdot,trimatcenter(temp_trimat_no(end),:),border_point);%获取边缘点if size(tempboderdot2,1)==0t_t=0;%边缘点超出,不再画面endelsetempboderdot2=edgepointfind2(trimatcenter(temp_trimat_no(end),:),trimatcenter(delright,:));endtempboderedge=[tempboderedge;tempboderdot2];%绘制边缘图形if t_t==1if tempboderdot1(1)~=tempboderdot2(1)if tempboderdot1(2)~=tempboderdot2(2)%边缘延长线3(边界角点tempboderedge=[tempboderedge;maketempboderdot(tempboderdot1,tempboderdot2)];endendpatch('Faces',1:length(tempboderedge),'Vertices',tempboderedge,'FaceVertexCData',rand(1,1),'FaceColor','flat');'hyh2';endendend%判断点在三角形外接圆的哪个部分
function panduan=whereispoint(xy1,xy2,xy3,xy0)
%判断点在三角形外接圆的哪个部分
[a,b,r2]=maketricenter(xy1,xy2,xy3);
x0=xy0(1);y0=xy0(2);
if a+sqrt(r2)<x0%x0在圆的右侧panduan=2;
elseif (x0-a)^2+(y0-b)^2<r2%x0在圆内panduan=0;
else%在圆外panduan=1;
end
end%做出三角形三点与内部1点之间的线段
function temp_edge=maketempedge(dot1,dot2,dot3,dot0,xdot)
%做出连接点与三角形之间的线
%每行包含2个点,4个坐标值,共3行
%xy1和xy0组成线段
temp_edge=zeros(3,6);
if xdot(dot1,1)<xdot(dot0,1)temp_edge(1,:)=[dot1,dot0,xdot(dot1,:),xdot(dot0,:)];
elseif xdot(dot1,1)==xdot(dot0,1)if xdot(dot1,2)<xdot(dot0,2)temp_edge(1,:)=[dot1,dot0,xdot(dot1,:),xdot(dot0,:)];elsetemp_edge(1,:)=[dot0,dot1,xdot(dot0,:),xdot(dot1,:)];end
elsetemp_edge(1,:)=[dot0,dot1,xdot(dot0,:),xdot(dot1,:)];
end
%xy2和xy0组成线段
if xdot(dot2,1)<xdot(dot0,1)temp_edge(2,:)=[dot2,dot0,xdot(dot2,:),xdot(dot0,:)];
elseif xdot(dot2,1)==xdot(dot0,1)if xdot(dot2,2)<xdot(dot0,2)temp_edge(2,:)=[dot2,dot0,xdot(dot2,:),xdot(dot0,:)];elsetemp_edge(2,:)=[dot0,dot2,xdot(dot0,:),xdot(dot2,:)];end
elsetemp_edge(2,:)=[dot0,dot2,xdot(dot0,:),xdot(dot2,:)];
end
%xy3和xy0组成线段
if xdot(dot3,1)<xdot(dot0,1)temp_edge(3,:)=[dot3,dot0,xdot(dot3,:),xdot(dot0,:)];
elseif xdot(dot3,1)==xdot(dot0,1)if xdot(dot3,2)<xdot(dot0,2)temp_edge(3,:)=[dot3,dot0,xdot(dot3,:),xdot(dot0,:)];elsetemp_edge(3,:)=[dot0,dot3,xdot(dot0,:),xdot(dot3,:)];end
elsetemp_edge(3,:)=[dot0,dot3,xdot(dot0,:),xdot(dot3,:)];
endend%做出一些列固定点发散的线段外点组成的三角形
function temp_trimat=maketemptri(temp_edgemat,xdot,dot0)
%将edge buffer中的边与当前的点进行组合成若干三角形
%temp_edgemat是新边,x是中心点
%思路是计算各个边对应角度,然后排序相连A=temp_edgemat(:,1:2);
pointline=A(A~=dot0);
N=length(pointline);
pointaxe=xdot(pointline,:);
img_pointaxe=pointaxe(:,1)+1i*pointaxe(:,2);
d_img_pointaxe=img_pointaxe-xdot(dot0,1)-1i*xdot(dot0,2);
angle_d_img_pointaxe=angle(d_img_pointaxe);
[~,index]=sort(angle_d_img_pointaxe);
index=[index;index(1)];%排序,然后依次串起来
temp_trimat=zeros(N,3);
for j=1:Ntemp_trimat(j,:)=[pointline(index(j)),pointline(index(j+1)),dot0];
endend%将三个点构成3条边
function edgemat=makeedge(dot1,dot2,dot3,xdot)
%将dot1 2 3这三个点构成三条边
%每行包含2个点,4个坐标值,共3行
edgemat=zeros(3,6);
%点12
if xdot(dot1,1)<xdot(dot2,1)edgemat(1,:)=[dot1,dot2,xdot(dot1,:),xdot(dot2,:)];
elseif xdot(dot1,1)==xdot(dot2,1)if xdot(dot1,2)<xdot(dot2,2)edgemat(1,:)=[dot1,dot2,xdot(dot1,:),xdot(dot2,:)];elseedgemat(1,:)=[dot2,dot1,xdot(dot2,:),xdot(dot1,:)];end
elseedgemat(1,:)=[dot2,dot1,xdot(dot2,:),xdot(dot1,:)];
end
%点13
if xdot(dot1,1)<xdot(dot3,1)edgemat(2,:)=[dot1,dot3,xdot(dot1,:),xdot(dot3,:)];
elseif xdot(dot1,1)==xdot(dot3,1)if xdot(dot1,2)<xdot(dot3,2)edgemat(2,:)=[dot1,dot3,xdot(dot1,:),xdot(dot3,:)];elseedgemat(2,:)=[dot3,dot1,xdot(dot3,:),xdot(dot1,:)];end
elseedgemat(2,:)=[dot3,dot1,xdot(dot3,:),xdot(dot1,:)];
end
%点23
if xdot(dot3,1)<xdot(dot2,1)edgemat(3,:)=[dot3,dot2,xdot(dot3,:),xdot(dot2,:)];
elseif xdot(dot3,1)==xdot(dot2,1)if xdot(dot3,2)<xdot(dot2,2)edgemat(3,:)=[dot3,dot2,xdot(dot3,:),xdot(dot2,:)];elseedgemat(3,:)=[dot2,dot3,xdot(dot2,:),xdot(dot3,:)];end
elseedgemat(3,:)=[dot2,dot3,xdot(dot2,:),xdot(dot3,:)];
end
% edgemat
end%求三角形外接圆圆心
function [a,b,r2]=maketricenter(xy1,xy2,xy3)
x1=xy1(1);y1=xy1(2);
x2=xy2(1);y2=xy2(2);
x3=xy3(1);y3=xy3(2);
a=((y2-y1)*(y3*y3-y1*y1+x3*x3-x1*x1)-(y3-y1)*(y2*y2-y1*y1+x2*x2-x1*x1))/(2.0*((x3-x1)*(y2-y1)-(x2-x1)*(y3-y1)));
b=((x2-x1)*(x3*x3-x1*x1+y3*y3-y1*y1)-(x3-x1)*(x2*x2-x1*x1+y2*y2-y1*y1))/(2.0*((y3-y1)*(x2-x1)-(y2-y1)*(x3-x1)));
r2=(x1-a)*(x1-a)+(y1-b)*(y1-b);
end%求边缘三角形
function [border_trimat,border_point,trimat_con]=makebordertri(trimat)
N=size(trimat,1);
border_trimat=[];
border_point=[];
trimat_con=zeros(N,3);
for j=1:N%tempborder_trimat=zeros(3,3);temptri=trimat(j,:);%计算temptri中12点边对应的三角形有哪些edgetrimat=find(sum(trimat==temptri(1),2)+sum(trimat==temptri(2),2)==2);edgetrimat(edgetrimat==j)=[];if size(edgetrimat,2)==0%这个边没有三角形相连,是个临边。border_point=[border_point;[temptri(1),temptri(2)]];elseif size(edgetrimat,2)==1%这个边没有三角形相连,是个临边。%tempborder_trimat(1,:)=trimat(edgetrimat,:);%记录三角形三点坐标trimat_con(j,1)=edgetrimat;%trimat_con记录上相邻三角形end%计算temptri中23点边对应的三角形有哪些edgetrimat=find(sum(trimat==temptri(2),2)+sum(trimat==temptri(3),2)==2);edgetrimat(edgetrimat==j)=[];if size(edgetrimat,2)==0border_point=[border_point;[temptri(2),temptri(3)]];elseif size(edgetrimat,2)==1%tempborder_trimat(2,:)=trimat(edgetrimat,:);trimat_con(j,2)=edgetrimat;end%计算temptri中31点边对应的三角形有哪些edgetrimat=find(sum(trimat==temptri(3),2)+sum(trimat==temptri(1),2)==2);edgetrimat(edgetrimat==j)=[];if size(edgetrimat,2)==0border_point=[border_point;[temptri(3),temptri(1)]];elseif size(edgetrimat,2)==1%tempborder_trimat(3,:)=trimat(edgetrimat,:);trimat_con(j,3)=edgetrimat;end%tempborder_trimat(all(tempborder_trimat==0, 2),:)=[];%删除0行if ~all(trimat_con(j,:))%如果边缘三角少于3个,就添加border_trimat=[border_trimat;temptri];endend%把边首尾排序一遍,输出border_point
for j=1:size(border_point,1)-1border_pointtemp=find(sum(border_point==border_point(j,2),2)==1);border_pointtemp(border_pointtemp==j)=[];%删除自己border_point([j+1,border_pointtemp],:)=border_point([border_pointtemp,j+1],:);if border_point(j,2)==border_point(j+1,2)border_point(j+1,[1,2])=border_point(j+1,[2,1]);end
endend%判断两个线段是否相交
function panduan=crossornot(l1xy1,l1xy2,l2xy1,l2xy2)
l1x1=l1xy1(1);l1y1=l1xy1(2);
l1x2=l1xy2(1);l1y2=l1xy2(2);
l2x1=l2xy1(1);l2y1=l2xy1(2);
l2x2=l2xy2(1);l2y2=l2xy2(2);
%先快速判断
if (max(l2x1,l2x2)<min(l1x1,l1x2))||(max(l2y1,l2y2)<min(l1y1,l1y2))||...(max(l1x1,l1x2)<min(l2x1,l2x2))||(max(l1y1,l1y2)<min(l2y1,l2y2))%如果判断为真,则一定不会相交panduan=0;
else%如果判断为假,进一步差积判断if ((((l1x1-l2x1)*(l2y2-l2y1)-(l1y1-l2y1)*(l2x2-l2x1))*...((l1x2-l2x1)*(l2y2-l2y1)-(l1y2-l2y1)*(l2x2-l2x1))) > 0 ||...(((l2x1-l1x1)*(l1y2-l1y1)-(l2y1-l1y1)*(l1x2-l1x1))*...((l2x2-l1x1)*(l1y2-l1y1)-(l2y2-l1y1)*(l1x2-l1x1))) > 0)%如果判断为真,则不会相交panduan=0;elsepanduan=1;end
end
end%两个向量做差积
function t=crossdot(xy1,xy2)
x1=xy1(1);y1=xy1(2);
x2=xy2(1);y2=xy2(2);
t=x1*y2-y1*x2;
end%点是否在三角形内
function panduan=pointintriangle(xy1,xy2,xy3,xy0)
x1=xy1(1);y1=xy1(2);
x2=xy2(1);y2=xy2(2);
x3=xy3(1);y3=xy3(2);
x0=xy0(1);y0=xy0(2);
PA=[x1-x0,y1-y0];PB=[x2-x0,y2-y0];PC=[x3-x0,y3-y0];
%利用差积同正或同负号来判断是否在三角内
t1=crossdot(PA,PB);
t2=crossdot(PB,PC);
t3=crossdot(PC,PA);
if abs(sign(t1)+sign(t2)+sign(t3))==3panduan=1;
elsepanduan=0;
endend%点是否在多边形内
function panduan=pointinmutiangle(xdot,d_no,xy0)
%d_no符合12341的格式,收尾相连
Ndot=xdot(d_no,:);
PN=[Ndot(:,1)-xy0(1),Ndot(:,2)-xy0(2)];
tn=zeros(length(d_no)-1,1);
for j=1:length(d_no)-1tn(j)=crossdot(PN(j,:),PN(j+1,:));
end
%利用差积同正或同负号来判断是否在三角内if abs(sum(sign(tn)))==length(d_no)-1panduan=1;
elsepanduan=0;
endend%做出同时具有一个中心点的一圈三角形,按照相接顺序排序
function [temp_trimat,temp_trimat_no,panduan]=findpoint2tri(j,trimat)
temp_trimat_no=1:size(trimat,1);
panduan=1;
temp_trimat=trimat(logical(sum(trimat==j,2)),:);
temp_trimat_no=temp_trimat_no(logical(sum(trimat==j,2)));
%把j放到每行第一个
for k=1:size(temp_trimat,1)temp_trimat(k,[find(temp_trimat(k,:)==j),1])=temp_trimat(k,[1,find(temp_trimat(k,:)==j)]);
end
%如果有一个点只出现过一次,把这个点包含的三角形放到第一行
tN2=tabulate(reshape(temp_trimat,[],1));
tN3=tN2((tN2(:,2)==1),1);
%其实如果中心点不在范围内也最好单列出来,挖坑if size(tN3,1)~=0tN3=tN3(1);tN=find(sum(temp_trimat==tN3,2));temp_trimat([1,tN],:)=temp_trimat([tN,1],:);temp_trimat_no([1,tN])=temp_trimat_no([tN,1]);panduan=0;if temp_trimat(1,3)==tN3temp_trimat(1,[2,3])=temp_trimat(1,[3,2]);end
end%把边首尾排序一遍
for k=2:size(temp_trimat,1)tN=find(sum(temp_trimat==temp_trimat(k-1,3),2));tN(tN==k-1)=[];temp_trimat([tN,k],:)=temp_trimat([k,tN],:);if temp_trimat(k-1,3)~=temp_trimat(k,2)temp_trimat(k,[2,3])=temp_trimat(k,[3,2]);endtemp_trimat_no([tN,k])=temp_trimat_no([k,tN]);
end
end%做出一点对边缘的中垂线,得到边缘点坐标
function tempboderdot=edgepointfind(tempedge,xdot,xy0,border_point)x0=xy0(1);y0=xy0(2);
%判断中心点是否在大图形内
d_no=[border_point(1,1);border_point(:,2)];
panduan=pointinmutiangle(xdot,d_no,xy0);
%求边的中点
xz=(xdot(tempedge(1),1)+xdot(tempedge(2),1))/2;
yz=(xdot(tempedge(1),2)+xdot(tempedge(2),2))/2;
%做中心点延长线,得到一条超长线段定为2得了,用到了边界为1这个条件
panduan2=true;
if panduan%在内部,做中心到边缘延长线即可t_xy1=[x0,y0]+[xz-x0,yz-y0]*2/sqrt((xz-x0)^2+(yz-y0)^2);elseif ~(x0<0||x0>1||y0<0||y0>1)%在外部,但是没超出边界,做中心到反向边缘t_xy1=[x0,y0]-[xz-x0,yz-y0]*2/sqrt((xz-x0)^2+(yz-y0)^2);else%在边界外panduan2=false;tempboderdot=[];%返回空矩阵end
endif panduan2%判断是4个边哪一个[xy3,xy4]=select4edge(xy0,t_xy1);%做4点求交点运算tempboderdot=crosspoint(xy0,t_xy1,xy3,xy4);
end
% panduan
% d_no
% xy0
% t_xy1
% tempboderdot
end%做出边缘界外连线,得到边缘点坐标
function tempboderdot1=edgepointfind2(xy1,xy2)
[xy3,xy4]=select4edge(xy1,xy2);
tempboderdot1=crosspoint(xy1,xy2,xy3,xy4);
end
%判断射线会与哪条边相交
function [xy3,xy4]=select4edge(xy0,xy1)
deg01=angle((0-xy0(1))+(0-xy0(2))*1i);%左下00
deg02=angle((1-xy0(1))+(0-xy0(2))*1i);%10
deg03=angle((1-xy0(1))+(1-xy0(2))*1i);%11
deg04=angle((0-xy0(1))+(1-xy0(2))*1i);%01
deg00=angle((xy1(1)-xy0(1))+(xy1(2)-xy0(2))*1i);
[~,I]=sort([deg00,deg01,deg02,deg03,deg04]);
k=find(I==1);
switch kcase 1xy3=[0,0];xy4=[0,1];case 2xy3=[0,0];xy4=[1,0];case 3xy3=[1,0];xy4=[1,1];case 4xy3=[0,1];xy4=[1,1];case 5xy3=[0,0];xy4=[0,1];
end
end%求两条线交点
function xy0=crosspoint(xy1,xy2,xy5,xy6)
a1=(xy2(2)-xy1(2));b1=(xy1(1)-xy2(1));c1=xy1(1)*xy2(2)-xy2(1)*xy1(2);
a2=(xy6(2)-xy5(2));b2=(xy5(1)-xy6(1));c2=xy5(1)*xy6(2)-xy6(1)*xy5(2);
xy0=[det([c1,b1;c2,b2])/det([a1,b1;a2,b2]),det([a1,c1;a2,c2])/det([a1,b1;a2,b2])];
end%删除所有中心点超出边界的三角形
function [temp_trimat,temp_trimat_no,delleft,delright]=selecttemp_trimat(temp_trimat,temp_trimat_no,trimatcenter)
delleft=0;delright=0;
for j=1:size(temp_trimat,1)centerdot=trimatcenter(temp_trimat_no(j),:);if and(and(0<centerdot(1),centerdot(1)<1),and(0<centerdot(2),centerdot(2)<1))break end
end
if j~=1delleft=temp_trimat_no(j-1);
end
temp_trimat(1:j-1,:)=[];
temp_trimat_no(1:j-1)=[];%倒着来一遍
temp_trimat=flipud(temp_trimat);
temp_trimat_no=fliplr(temp_trimat_no);
for j=1:size(temp_trimat,1)centerdot=trimatcenter(temp_trimat_no(j),:);if and(and(0<centerdot(1),centerdot(1)<1),and(0<centerdot(2),centerdot(2)<1))break end
end
if j~=1delright=temp_trimat_no(j-1);
end
temp_trimat(1:j-1,:)=[];
temp_trimat_no(1:j-1)=[];temp_trimat=flipud(temp_trimat);
temp_trimat_no=fliplr(temp_trimat_no);end%利用两个边缘点求角点
function tempboderdot3=maketempboderdot(tempboderdot1,tempboderdot2)
tempboderdot3=zeros(1,2);
%第一个边
if abs(tempboderdot1(1)-0)<1e-10tempboderdot3(1)=0;
end
if abs(tempboderdot1(1)-1)<1e-10tempboderdot3(1)=1;
end
if abs(tempboderdot1(2)-0)<1e-10tempboderdot3(2)=0;
end
if abs(tempboderdot1(2)-1)<1e-10tempboderdot3(2)=1;
end
%第二个边
if abs(tempboderdot2(1)-0)<1e-10tempboderdot3(1)=0;
end
if abs(tempboderdot2(1)-1)<1e-10tempboderdot3(1)=1;
end
if abs(tempboderdot2(2)-0)<1e-10tempboderdot3(2)=0;
end
if abs(tempboderdot2(2)-1)<1e-10tempboderdot3(2)=1;
end
end
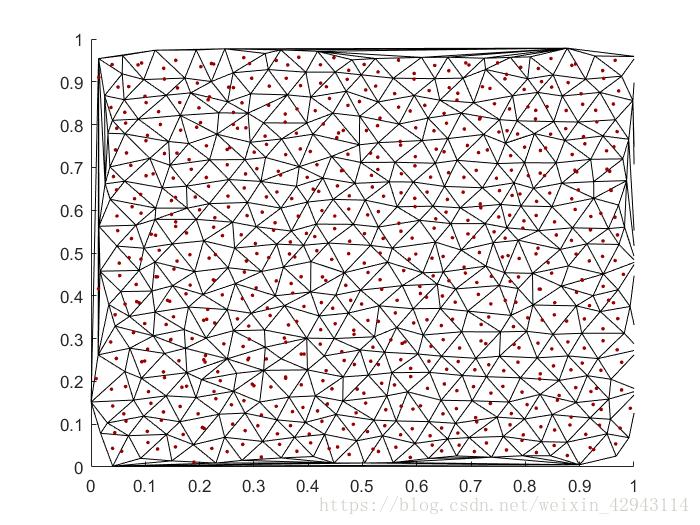
输出的网格
未上色的Voronoi图
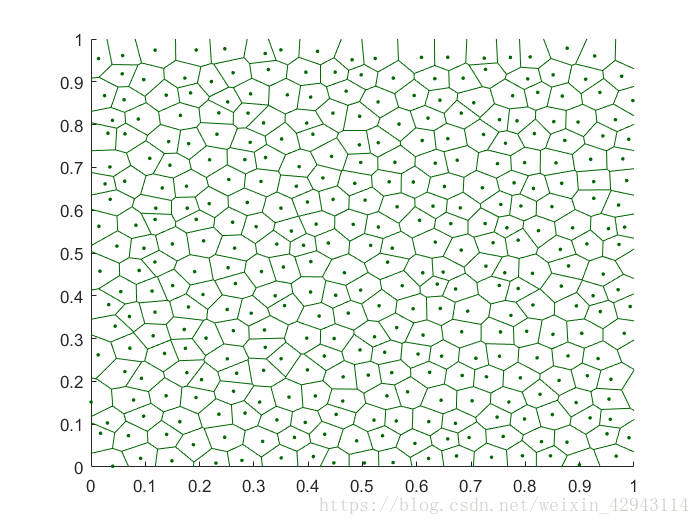
彩色Voronoi图
结束