文章目录
- 1 随机椒盐噪声
- 2 高斯噪声
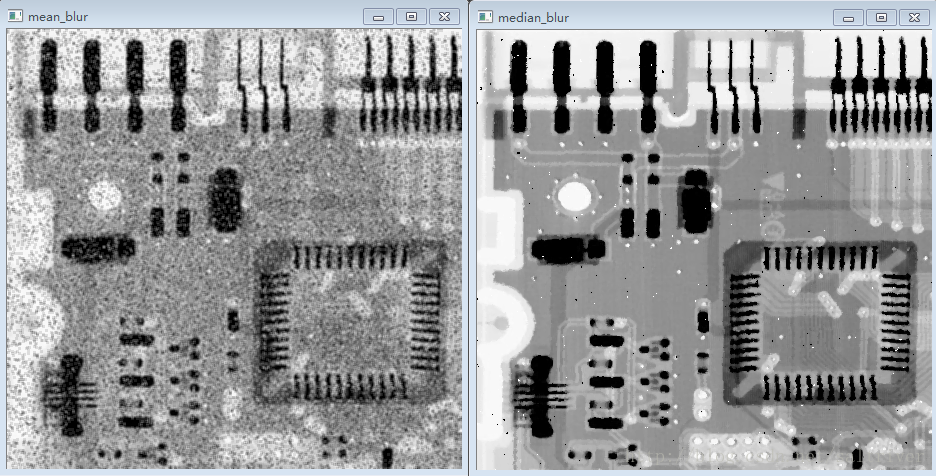
- 3 均值滤波器
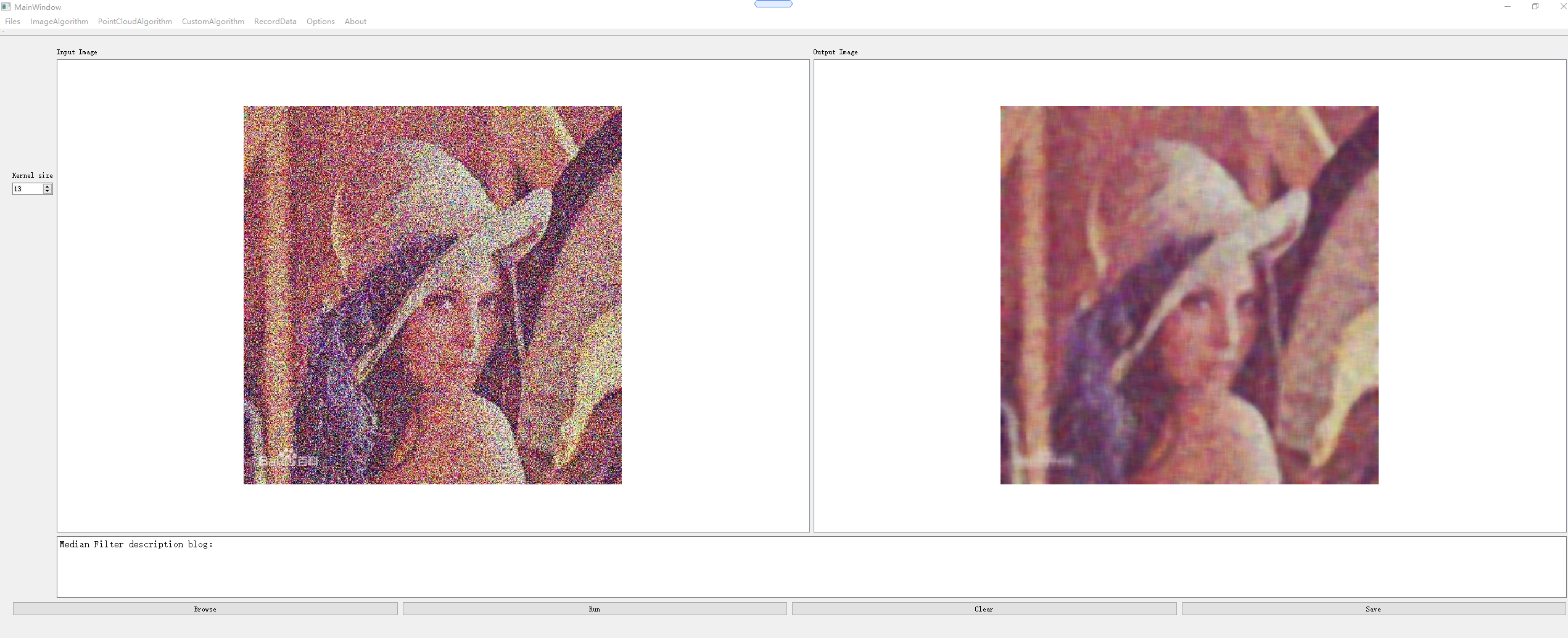
- 4 中值滤波器
1 随机椒盐噪声
椒噪声:灰度值为0的噪声点,黑噪声
盐噪声:灰度值为255的噪声点,白噪声
思路:获取图像长、宽、通道数,在每个通道矩阵中随机产生灰度值为0和255的像素。

def salt_and_pepper_noise(image,percentage):rows,columns,channels = image.shape#获取图片的长、宽、通道数nums = int(rows*columns*percentage)#每个通道噪声数量for channel in range(channels):for num in range(nums):row = random.randint(0,rows-1)#随机行号column = random.randint(0,columns-1)#随机列号if random.randint(0,1) == 0:image[row,column,channel] = 0#椒噪声else:image[row,column,channel] = 255#盐噪声return imageif __name__ == '__main__':image = cv2.imread('./1.jpg') # 读取图片a = salt_and_pepper_noise(image,percentage=0.1)cv2.imshow('img',a)cv2.waitKey(0)
2 高斯噪声
思路:产生高斯分布噪声与原图像进行叠加,并控制数值空间为0至255。

def guassian_Noise(image,mean,sigma):#sigma方差tempt = np.array(image/255,dtype = float)noise = np.random.normal(mean,sigma, image.shape)tempt += noisetempt = np.clip(tempt, 0, 1)tempt = np.uint8(tempt * 255)return temptif __name__ == '__main__':image = cv2.imread('./1.jpg') # 读取图片b = guassian_Noise(image,0,1)cv2.imshow('img', b)cv2.waitKey(0)
3 均值滤波器
思路:输入一个 n ∗ n n*n n∗n各个元素为1的矩阵作为滤波器核,然后将原图像进行边缘填充,按步长为1的跨度从左到右,从上到下,对填充图片上的 n ∗ n n*n n∗n局域矩阵依次进行点乘,并将点乘后局域矩阵的各个元素值加在一起除以 n 2 n^2 n2,这个值为滤波后图像的一个像素值,全部滤波后就会获得滤波图像,彩色图像是三通道,因此需要对三个通道依次滤波。

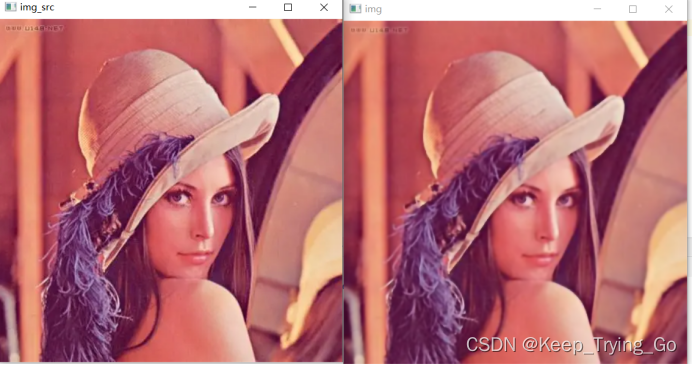
左边随机椒盐噪声,右边均值滤波9*9

左边高斯噪声,右边均值滤波9*9
def means_filter(image,filter_size):input_image = np.copy(image)kernal = np.ones((filter_size,filter_size))# 卷积核padding_num = int((filter_size - 1)/2)#需要补0b,g,r = cv2.split(input_image)#分开三通道b = np.pad(b, (padding_num, padding_num), mode='constant', constant_values=0)#图像三通道边缘填充g = np.pad(g, (padding_num, padding_num), mode='constant', constant_values=0)r = np.pad(r, (padding_num, padding_num), mode='constant', constant_values=0)input_image = cv2.merge([b,g,r])#合并三通道wide,height,channels = input_image.shapeoutput_image = np.copy(input_image)for channel in range(channels):#均值滤波for i in range(padding_num,wide-padding_num):for j in range(padding_num,height-padding_num):output_image[i,j,channel] = np.sum(\kernal * input_image[i-padding_num:i+padding_num+1,j-padding_num:j+padding_num+1,channel])/(filter_size**2)output_image = output_image[padding_num:wide - padding_num, padding_num:height - padding_num] # 裁剪return output_imageif __name__ == '__main__':c = means_filter(image,9)imgs = np.hstack([image,c])cv2.imshow('img', imgs)cv2.waitKey(0)
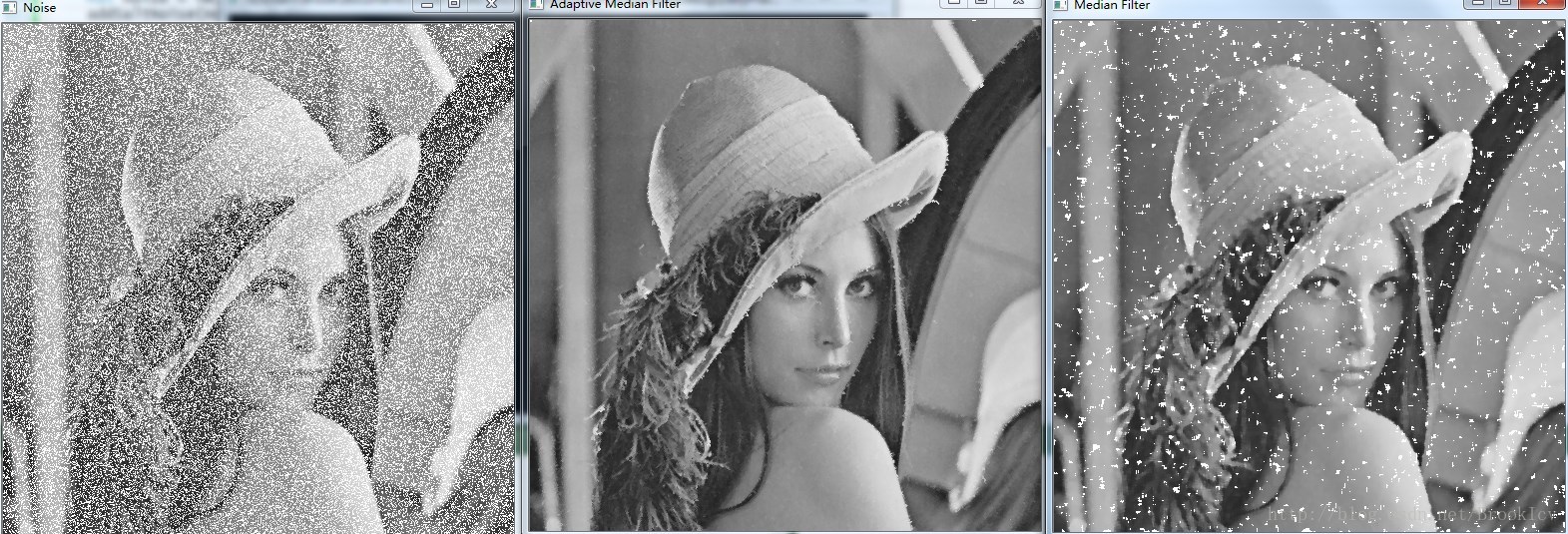
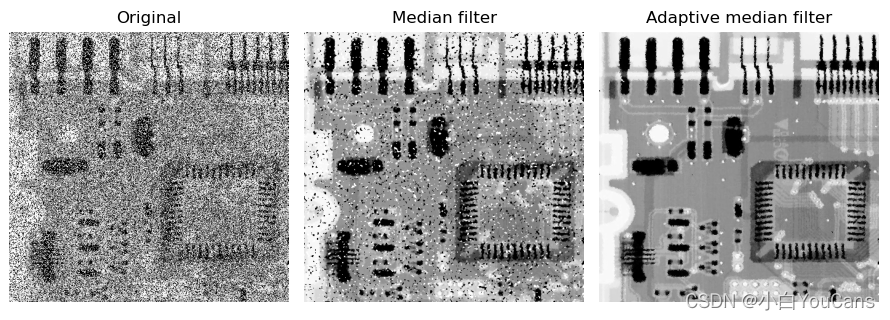
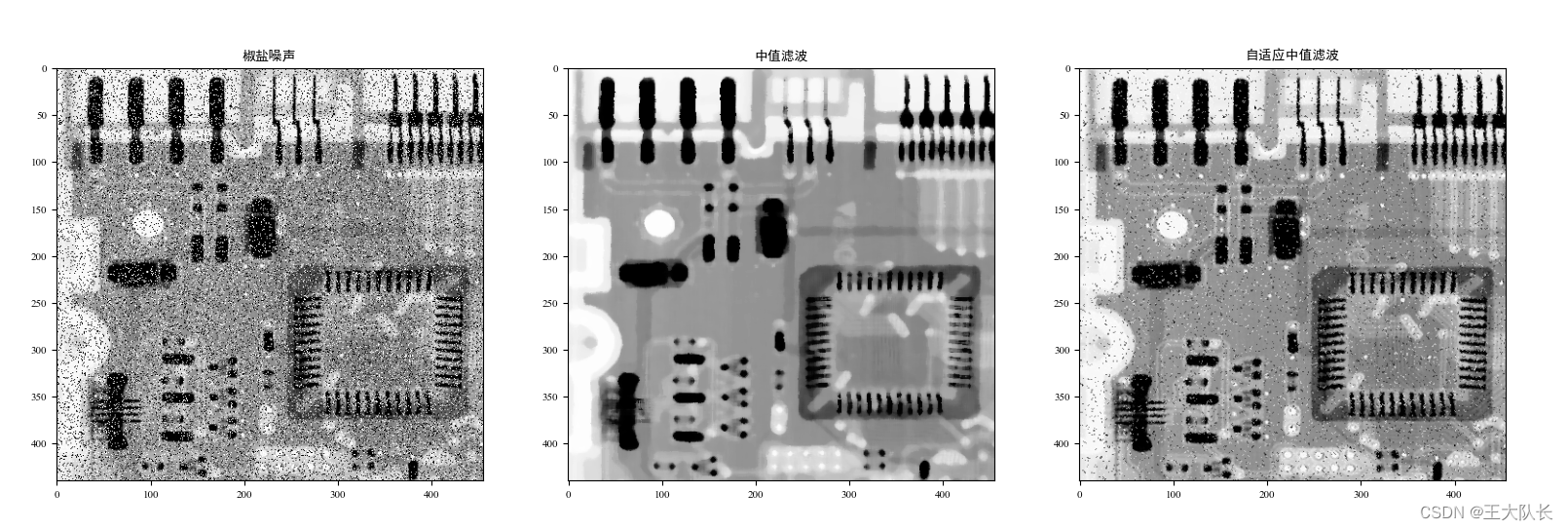
4 中值滤波器
思路:输入一个 n ∗ n n*n n∗n各个元素为1的矩阵作为滤波器核,然后将原图像进行边缘填充,按步长为1的跨度从左到右,从上到下,对填充图片上的 n ∗ n n*n n∗n局域矩阵依次进行中值排序,并这个中值为滤波后图像的一个像素值,全部滤波后就会获得滤波图像,彩色图像是三通道,因此需要对三个通道依次滤波。

左边随机椒盐噪声,右边中值滤波9*9

左边高斯噪声,右边中值滤波9*9
def median_filter(image,filter_size):input_image = np.copy(image)kernal = np.ones((filter_size,filter_size))# 卷积核padding_num = int((filter_size - 1)/2)#需要补0b,g,r = cv2.split(input_image)#分开三通道b = np.pad(b, (padding_num, padding_num), mode='constant', constant_values=0)#图像三通道边缘填充g = np.pad(g, (padding_num, padding_num), mode='constant', constant_values=0)r = np.pad(r, (padding_num, padding_num), mode='constant', constant_values=0)input_image = cv2.merge([b,g,r])#合并三通道wide,height,channels = input_image.shapeoutput_image = np.copy(input_image)for channel in range(channels):#中值滤波for i in range(padding_num,wide-padding_num):for j in range(padding_num,height-padding_num):output_image[i,j,channel] = np.median(input_image[i-padding_num:i+padding_num+1,j-padding_num:j+padding_num+1,channel])output_image = output_image[padding_num:wide - padding_num, padding_num:height - padding_num] # 裁剪return output_imageif __name__ == '__main__':image = cv2.imread('./2.png') # 读取图片d = median_filter(image,9)imgs = np.hstack([image,d])cv2.imshow('img', imgs)cv2.waitKey(0)
/2.png') # 读取图片d = median_filter(image,9)imgs = np.hstack([image,d])cv2.imshow('img', imgs)cv2.waitKey(0)