具体流程
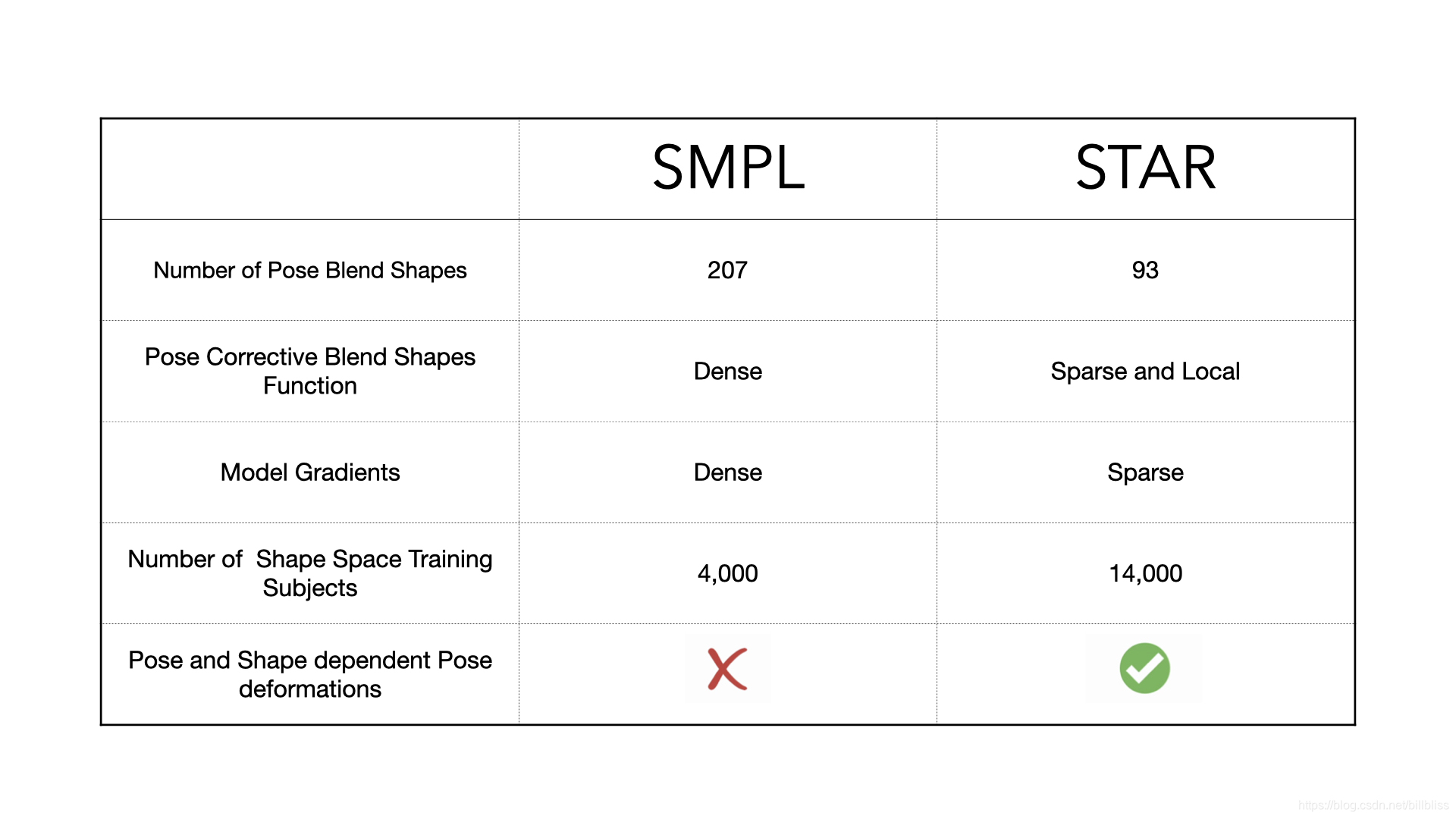
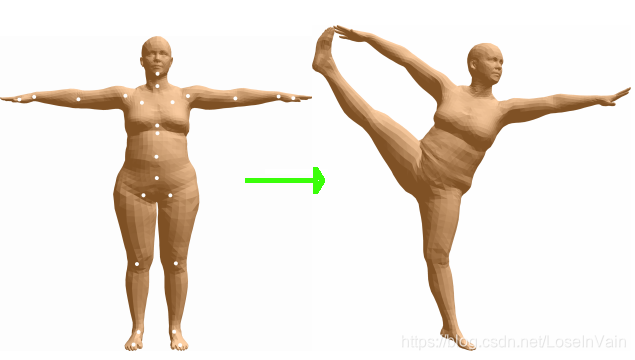
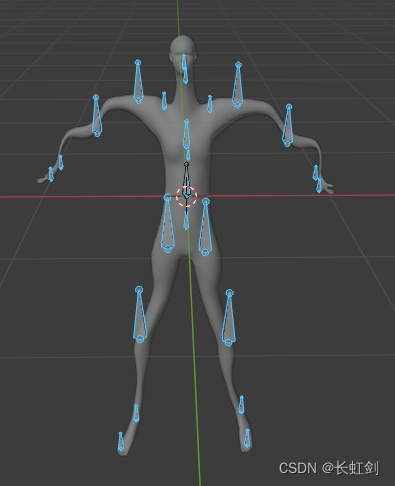
一、SMPL模型
SMPL模型拥有6890个XYZ坐标的3D人体点,目前第一步需要将这6890个人体点进行分析,并将不同部位的点位进行归并,具体分为以下几个部分:头部,胸部,腰部,左臂,右臂,左腿,右腿。因6890个XYZ坐标并非连续的坐标,是先描述左半边身体,然后再描述右半边身体,所以需花费较长时间分类。
上述分类区域的部署是为了方便找到具体点位的XYZ坐标范围,方便对应IUV坐标。
二、具体流程
实现具体流程
若找到了各个点位的IUV坐标范围后,后期推理流程会省略将IUV坐标转换成XYZ坐标去匹配点位的XYZ坐标这个步骤,演变成下面流程:
其中SMPL人体XYZ坐标点充当中间变量,转换得到人体的IUV坐标后就不需用到了。
三、目前实现左眼位置代码
总体代码可以参考densepose的notebook示例,以及一个densepose的IUV坐标转换XYZ进行贴图的notebook示例。
1、下载SMPL人体模型:

2、安装依赖:
pip install chumpy
pip install tqdm
3、具体代码
首先加载SMPL模型,并绘制具体人体模型:
# 导入包
import pickle
import numpy as np
import matplotlib.pyplot as pltfrom tqdm import tqdm
from PIL import Image
from mpl_toolkits.mplot3d import axes3d, Axes3D # Now read the smpl model.
with open('./models/basicmodel_m_lbs_10_207_0_v1.1.0.pkl', 'rb') as f:data = pickle.load(f, encoding='iso-8859-1')Vertices = data['v_template'] ## Loaded vertices of size (6890, 3)X,Y,Z = [Vertices[:,0], Vertices[:,1],Vertices[:,2]]fig = plt.figure(figsize=[150,30])ax = fig.add_subplot(141, projection='3d')
ax.scatter(Z, X, Y, s=0.02, c='k')
smpl_view_set_axis_full_body(ax)ax = fig.add_subplot(142, projection='3d')
ax.scatter(Z,X,Y,s=0.02,c='k')
smpl_view_set_axis_full_body(ax,45)ax = fig.add_subplot(143, projection='3d')
ax.scatter(Z,X,Y,s=0.02,c='k')
smpl_view_set_axis_full_body(ax,90)ax = fig.add_subplot(144, projection='3d')
ax.scatter(Z,X,Y, s=1, c='k')
smpl_view_set_axis_full_body(ax,0)plt.show()
然后画出每几个连续点位然后区分人体区域:头部,胸部,腰部,左臂,右臂,左腿,右腿。目前左眼的部分点位区域为:2778~2800。
def plot_points(begin, end, b, e, body=False, face=True):Z_ft, X_ft, Y_ft = Z[begin:end], X[begin:end], Y[begin:end]fig = plt.figure(figsize=[40,10])if body:ax = fig.add_subplot(141, projection='3d')ax.scatter(Z_ft, X_ft, Y_ft, s=0.02, c='k')ax.scatter(Z_ft[b:e], X_ft[b:e], Y_ft[b:e], s=15, c='r')smpl_view_set_axis_full_body(ax)plt.show()if face:ax = fig.add_subplot(144, projection='3d')ax.scatter(Z_ft, X_ft, Y_ft, s=1, c='k')ax.scatter(Z_ft[b:e], X_ft[b:e], Y_ft[b:e], s=15, c='r')smpl_view_set_axis_face(ax,0)plt.show()# 画出左眼点位图
plot_points(0, -1, 2778, 2800, False, True) # 得到左眼位置的XYZ坐标范围
Z_ft, X_ft, Y_ft = Z[0:6800], X[0:6800], Y[0:6800]
Z_part, X_part, Y_part = Z_ft[2780:2800], X_ft[2780:2800], Y_ft[2780:2800]Z_leye = []
X_leye = []
Y_leye = []
for i in range(len(Z_ft)):if Z_ft[i] >= min(Z_part) and Z_ft[i] <= max(Z_part) and X_ft[i] >= min(X_part) and X_ft[i] <= max(X_part) and Y_ft[i] >= min(Y_part) and Y_ft[i] <= max(Y_part):Z_leye.append(Z_ft[i])X_leye.append(X_ft[i])Y_leye.append(Y_ft[i])
定义densepose的IUV坐标转换为XYZ的代码:
import numpy as np
import copy
import cv2
from scipy.io import loadmat
import scipy.spatial.distance
import os class DensePoseMethods:def __init__(self):#ALP_UV = loadmat( './UV_Processed.mat' ) # Use your own pathself.FaceIndices = np.array( ALP_UV['All_FaceIndices']).squeeze()self.FacesDensePose = ALP_UV['All_Faces']-1self.U_norm = ALP_UV['All_U_norm'].squeeze()self.V_norm = ALP_UV['All_V_norm'].squeeze()self.All_vertices = ALP_UV['All_vertices'][0]def barycentric_coordinates_fast(self, P0, P1, P2, P):# This is a merge of barycentric_coordinates_exists & barycentric_coordinates.# Inputs are (n, 3) shaped.u = P1 - P0 #u is (n,3)v = P2 - P0 #v is (n,3)w = P.T - P0 #w is (n,3)#vCrossW = np.cross(v, w) #result is (n,3)vCrossU = np.cross(v, u) #result is (n,3)A = np.einsum('nd,nd->n', vCrossW, vCrossU) # vector-wise dot product. Result shape is (n,)#uCrossW = np.cross(u, w)uCrossV = - vCrossUB = np.einsum('nd,nd->n', uCrossW, uCrossV)#sq_denoms = np.einsum('nd,nd->n', uCrossV, uCrossV) #result shape is (n,)sq_rs = np.einsum('nd,nd->n', vCrossW, vCrossW)sq_ts = np.einsum('nd,nd->n', uCrossW, uCrossW)rs = np.sqrt(sq_rs / sq_denoms) #result shape is (n,)ts = np.sqrt(sq_ts / sq_denoms)#results = [None] * P0.shape[0]for i in range(len(results)):if not (A[i] < 0 or B[i] < 0):if ((rs[i] <= 1) and (ts[i] <= 1) and (rs[i] + ts[i] <= 1)):results[i] = (1 - (rs[i] + ts[i]) , rs[i], ts[i])return resultsdef IUV2FBC_fast( self, I_point , U_point, V_point):P = np.array([ U_point , V_point , 0 ])FaceIndicesNow = np.where( self.FaceIndices == I_point )FacesNow = self.FacesDensePose[FaceIndicesNow]#P_0 = np.vstack( (self.U_norm[FacesNow][:,0], self.V_norm[FacesNow][:,0], np.zeros(self.U_norm[FacesNow][:,0].shape))).transpose()P_1 = np.vstack( (self.U_norm[FacesNow][:,1], self.V_norm[FacesNow][:,1], np.zeros(self.U_norm[FacesNow][:,1].shape))).transpose()P_2 = np.vstack( (self.U_norm[FacesNow][:,2], self.V_norm[FacesNow][:,2], np.zeros(self.U_norm[FacesNow][:,2].shape))).transpose()#bcs = self.barycentric_coordinates_fast(P_0, P_1, P_2, P)for i, bc in enumerate(bcs):if bc is not None:bc1,bc2,bc3 = bcreturn(FaceIndicesNow[0][i],bc1,bc2,bc3)## If the found UV is not inside any faces, select the vertex that is closest!#D1 = scipy.spatial.distance.cdist( np.array( [U_point,V_point])[np.newaxis,:] , P_0[:,0:2]).squeeze()D2 = scipy.spatial.distance.cdist( np.array( [U_point,V_point])[np.newaxis,:] , P_1[:,0:2]).squeeze()D3 = scipy.spatial.distance.cdist( np.array( [U_point,V_point])[np.newaxis,:] , P_2[:,0:2]).squeeze()#minD1 = D1.min()minD2 = D2.min()minD3 = D3.min()#if((minD1< minD2) & (minD1< minD3)):return( FaceIndicesNow[0][np.argmin(D1)] , 1.,0.,0. )elif((minD2< minD1) & (minD2< minD3)):return( FaceIndicesNow[0][np.argmin(D2)] , 0.,1.,0. )else:return( FaceIndicesNow[0][np.argmin(D3)] , 0.,0.,1. )def FBC2PointOnSurface( self, FaceIndex, bc1,bc2,bc3,Vertices ):##Vert_indices = self.All_vertices[self.FacesDensePose[FaceIndex]]-1##p = Vertices[Vert_indices[0],:] * bc1 + \Vertices[Vert_indices[1],:] * bc2 + \Vertices[Vert_indices[2],:] * bc3 ##return(p)
读取照片face1.png的IUV保存结果,并将IUV坐标转换为XYZ坐标并将在左眼位置的IUV坐标都保存下来。
iuv_arr = np.load('./saved/iuv_gao1.npy')
print('iuv_arr.shape: ', iuv_arr.shape)
INDS = iuv_arr[0,:,:]
pick_idx = 1 # PICK PERSON INDEX!C = np.where(INDS >= pick_idx)iuv0 = iuv_arr[0,:,:]
iuv1 = iuv_arr[1,:,:]
iuv2 = iuv_arr[2,:,:]
IUV = np.concatenate((iuv0[:,:,np.newaxis], iuv1[:,:,np.newaxis], iuv2[:,:,np.newaxis]), axis=2)
print('IUV shape:', IUV.shape)print('num pts on picked person:', C[0].shape)
IUV_pick = IUV[C[0], C[1], :] # boolean indexing
IUV_pick = IUV_pick.astype(np.float)
IUV_pick[:, 1:3] = IUV_pick[:, 1:3] / 255.0
collected_x = np.zeros(C[0].shape)
collected_y = np.zeros(C[0].shape)
collected_z = np.zeros(C[0].shape)# 开始将IUV坐标转换为XYZ坐标,并将对应位置的IUV坐标保存下来为iuv_list。
DP = DensePoseMethods()
pbar = tqdm(total=IUV_pick.shape[0])iuv_list = []
for i in range(IUV_pick.shape[0]):pbar.update(1) # Use tqdm to visualize the converting process# Convert IUV to FBC (faceIndex and barycentric coordinates.)FaceIndex,bc1,bc2,bc3 = DP.IUV2FBC_fast(IUV_pick[i, 0], IUV_pick[i, 1], IUV_pick[i, 2])# Use FBC to get 3D coordinates on the surface.p = DP.FBC2PointOnSurface( FaceIndex, bc1,bc2,bc3,Vertices )#collected_x[i] = p[0]collected_y[i] = p[1]collected_z[i] = p[2]if p[0] >= min(X_leye) and p[0] <= max(X_leye) and p[1] >= min(Y_leye) and p[1] <= max(Y_leye) and p[2] >= min(Z_leye) and p[2] <= max(Z_leye):save_iuv = [IUV_pick[i, 0], IUV_pick[i, 1], IUV_pick[i, 2]]iuv_list.append(save_iuv)pbar.close()
print('IUV to PointOnSurface done')# 得到iuv单独的范围list
print(len(iuv_list))
i_leye_list = []
u_leye_list = []
v_leye_list = []
for cur_iuv_arr in iuv_list:i_leye_list.append(cur_iuv_arr[0])u_leye_list.append(cur_iuv_arr[1])v_leye_list.append(cur_iuv_arr[2])
在原图中画出左眼区域:
img = cv2.imread('./saved/face1.png')
bbox_xywh = [4.8355975, 0., 462.35657, 667.8104] # densepose推理得到的人体区域
x, y, w, h = int(bbox_xywh[0]), int(bbox_xywh[1]), int(bbox_xywh[2]), int(bbox_xywh[3])
crop_img = img[y:y+h, x:x+w] # 人体区域图像
i_face1 = iuv_arr[0,:,:]
u_face1 = iuv_arr[1,:,:]
v_face1 = iuv_arr[2,:,:]
U = u_face1.astype(float) / 255.0
V = v_face1.astype(float) / 255.0# 显示cv2格式的图
def show_pic_hor(pic_list):nums = len(pic_list)plt_nums = np.ceil(np.sqrt(nums))for i in range(nums):plt.subplot(1, nums, i + 1)if pic_list[i].ndim == 3:try:cur_pic_rgb = cv2.cvtColor(pic_list[i], cv2.COLOR_BGR2RGB)except:cur_pic_rgb = pic_list[i]plt.imshow(cur_pic_rgb)elif pic_list[i].ndim == 2:plt.imshow(pic_list[i], 'gray')plt.show()# 画左眼的函数
def plot_left_eye(crop_img, iuv_list, i_face1, U, V):img_cut = crop_img.copy()k = 0for i in range(img_cut.shape[0]):for j in range(img_cut.shape[1]):if i_face1[i,j] == iuv_list[k][0] and U[i,j] == iuv_list[k][1] and V[i,j] == iuv_list[k][2]:cv2.circle(img_cut, (j,i), 1, (0,0,255), 0)k += 1if k == len(iuv_list):return img_cutreturn img_cutimg_cut = plot_left_eye(crop_img, iuv_list, i_face1, U, V)
show_pic_hor([img_cut])
参考项目:
(1)Densepose:https://github.com/facebookresearch/DensePose/blob/main/notebooks/DensePose-COCO-on-SMPL.ipynb
(2)Detectron2:https://github.com/facebookresearch/detectron2
(2)Densepose IUV-XYZ:https://github.com/linjunyu/Detectron2-Densepose-IUV2XYZ