原文:Welcome to PyTorch Tutorials — PyTorch Tutorials 1.12.0+cu102 documentation
中文翻译,加个人总结,便于理解与回顾。
前置知识:python、神经网络
目录
基础概念:
张量Tensors:
tensor的性质:
tensor的操作:
基本使用:
数据集
自定义数据集:
数据载入器
变换
搭建神经网络
模型参数:
自动微分
禁止梯度跟踪
计算图
tensor梯度和雅各布乘积
优化模型参数
超参数
保存于载入模型
保存、加载模型权重
保存加载模型形状
将模型导出为ONNX
基础概念:
张量Tensors:
一维数组,二维矩阵,三维以上称作张量。类似于NumPy的ndarrays,只是tensor可以在GPU或其他硬件加速器上运行。事实上,tensor和NumPy数组通常可以共享相同的底层内存,不需要复制数据。tensor还为自动微分进行了优化。
#张量初始化:#直接初始化:
data = [[1, 2], [3, 4]]
x_data = torch.tensor(data)#从Numpy数组中初始化
np_array = np.array(data)
x_np = torch.from_numpy(np_array)#从其他tensor中初始化
x_ones = torch.ones_like(x_data) # retains the properties of x_data
print(f"Ones Tensor: \n {x_ones} \n")x_rand = torch.rand_like(x_data, dtype=torch.float) # overrides the datatype of x_data
print(f"Random Tensor: \n {x_rand} \n")#使用随机数和常数初始化
shape = (2,3,)
rand_tensor = torch.rand(shape)
ones_tensor = torch.ones(shape)
zeros_tensor = torch.zeros(shape)print(f"Random Tensor: \n {rand_tensor} \n")
print(f"Ones Tensor: \n {ones_tensor} \n")
print(f"Zeros Tensor: \n {zeros_tensor}")
tensor的性质:
形状:tensor.shape
数据类型:tensor.dtype
存储设备:tensor.device
tensor的操作:
torch — PyTorch 1.12 documentation![]() https://pytorch.org/docs/stable/torch.html全面介绍了100多种tensor操作,包括算术、线性代数、矩阵操作(转置、索引、切片)、采样等。
https://pytorch.org/docs/stable/torch.html全面介绍了100多种tensor操作,包括算术、线性代数、矩阵操作(转置、索引、切片)、采样等。
默认情况下,tensor是在CPU上创建的。我们需要使用.to方法明确地将tensor移动到GPU上(在检查GPU的可用性之后)。请记住,在不同的设备上复制存储size比较大的tensor,在时间和内存上都是很昂贵的!
# 如果有的话,我们把我们的tensor移到GPU上
if torch.cuda.is_available():tensor = tensor.to('cuda')
# 类似numpy的一系列操作:
tensor = torch.ones(4, 4)
print('第一行: ', tensor[0])
print('第一列:', tensor[:, 0])
print('最后一列:', tensor[..., -1])
tensor[:,1] = 0
print(tensor)#连接tensor
t1 = torch.cat([tensor, tensor, tensor], dim=1)
print(t1)# 这将计算两个tensor之间的矩阵乘法,y1, y2, y3将有相同的值
y1 = tensor @ tensor.T
y2 = tensor.matmul(tensor.T)y3 = torch.rand_like(tensor)
torch.matmul(tensor, tensor.T, out=y3)# 这将计算出元素相乘的结果。z1,z2, z3有相同的值
z1 = tensor * tensor
z2 = tensor.mul(tensor)z3 = torch.rand_like(tensor)
torch.mul(tensor, tensor, out=z3)#item()将其变换为Python数值
agg = tensor.sum()
agg_item = agg.item()
print(agg_item, type(agg_item))# 原地操作
print(tensor, "\n")
tensor.add_(5)
print(tensor)# 和Numpy转换
t = torch.ones(5)
print(f"t: {t}")
n = t.numpy()
print(f"n: {n}")
t.add_(1) # tensor的变化反映在NumPy数组中
print(f"t: {t}")
print(f"n: {n}")# Numpy数组转换为tensor
n = np.ones(5)
t = torch.from_numpy(n)
np.add(n, 1, out=n) # Numpy数组中的变化反映在tensor中
print(f"t: {t}")
print(f"n: {n}")
基本使用:
数据集
torch.utils.data.Dataset
import torch
from torch.utils.data import Dataset
from torchvision import datasets
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt# 加载数据集
training_data = datasets.FashionMNIST( root="data", train=True, download=True, transform=ToTensor() )test_data = datasets.FashionMNIST( root="data", train=False, download=True, transform=ToTensor() )# 数据集的迭代和可视化
labels_map = {0: "T-Shirt",1: "Trouser",2: "Pullover",3: "Dress",4: "Coat",5: "Sandal",6: "Shirt",7: "Sneaker",8: "Bag",9: "Ankle Boot",
}
figure = plt.figure(figsize=(8, 8))
cols, rows = 3, 3
for i in range(1, cols * rows + 1):sample_idx = torch.randint(len(training_data), size=(1,)).item()img, label = training_data[sample_idx]figure.add_subplot(rows, cols, i)plt.title(labels_map[label])plt.axis("off")plt.imshow(img.squeeze(), cmap="gray")
plt.show()
自定义数据集:
需要实现下面三个方法
__init__
在实例化数据集对象时,__init__函数运行一次。我们初始化目录,目录中包括图像文件、标注文件和变换(在下一节有更详细的介绍)。
__len__
函数 __len__ 返回我们数据集中的样本数。
__getitem__
函数 __getitem__ 在给定的索引idx处加载并返回数据集中的一个样本。基于索引,它确定图像在硬盘上的位置,使用read_image将其变换为tensor,从self.img_labels中的csv数据中获取相应的标签,对其调用变换函数(如果适用),并在一个元组中返回tensor图像和相应标签。
import os
import pandas as pd
from torchvision.io import read_imageclass CustomImageDataset(Dataset):def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):self.img_labels = pd.read_csv(annotations_file)self.img_dir = img_dirself.transform = transformself.target_transform = target_transformdef __len__(self):return len(self.img_labels)def __getitem__(self, idx):img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])image = read_image(img_path)label = self.img_labels.iloc[idx, 1]if self.transform:image = self.transform(image)if self.target_transform:label = self.target_transform(label)return image, label
数据载入器
torch.utils.data.DataLoader
DataLoader:数据集每次都会检索我们的数据集的特征和标签。在训练模型时,我们通常希望以 "小批 "的形式传递样本,在每个epoch中重新洗牌以减少模型的过拟合,并使用Python的multiprocessing来加快数据的检索速度。
from torch.utils.data import DataLoader# 加载数据
train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)# 迭代
# Display image and label.
train_features, train_labels = next(iter(train_dataloader))
print(f"Feature batch shape: {train_features.size()}")
print(f"Labels batch shape: {train_labels.size()}")
img = train_features[0].squeeze()
label = train_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")变换
torchvision.transform
ToTensor:ToTensor将PIL图像或NumPy的ndarray变换为FloatTensor,并将图像的像素亮度值按[0., 1.]的范围进行缩放。
Lambda:Lambda变换应用任何用户定义的Lambda函数。在这里,我们定义了一个函数,把整数变成一个one-hot的tensor。它首先创建一个大小为10(我们数据集中的标签数量),值为0的tensor,并调用scatter_,在标签y给出的索引上分配一个value=1。
import torch
from torchvision import datasets
from torchvision.transforms import ToTensor, Lambdads = datasets.FashionMNIST(root="data",train=True,download=True,transform=ToTensor(),target_transform=Lambda(lambda y: torch.zeros(10, dtype=torch.float).scatter_(0, torch.tensor(y), value=1))
)
搭建神经网络
torch.nn
PyTorch中的每个模块都是nn.Module的子类
nn.Flatten:展平
nn.Linear:线性层,使用其存储的权重和偏置对输入进行线性变换
nn.ReLU:非线性激活函数
nn.Sequential:有序模块的容器
seq_modules = nn.Sequential(flatten,layer1,nn.ReLU(),nn.Linear(20, 10)
)
input_image = torch.rand(3,28,28)
logits = seq_modules(input_image)
nn.Softmax:对数被缩放到数值区间[0, 1],代表模型对每个类别的预测概率。 dim参数表示数值必须和为1的维度。
softmax = nn.Softmax(dim=1)
pred_probab = softmax(logits)
完整代码:
import os
import torch
from torch import nn
from torch.utils.data import DataLoader
from torchvision import datasets, transforms# 获取训练的设备
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print('Using {} device'.format(device))# 定义类
class NeuralNetwork(nn.Module):def __init__(self):super(NeuralNetwork, self).__init__()self.flatten = nn.Flatten()self.linear_relu_stack = nn.Sequential(nn.Linear(28*28, 512),nn.ReLU(),nn.Linear(512, 512),nn.ReLU(),nn.Linear(512, 10),)def forward(self, x):x = self.flatten(x)logits = self.linear_relu_stack(x)return logits
# 创建一个NeuralNetwork的实例,并将其移动到设备上,并打印其结构
model = NeuralNetwork().to(device)
print(model)使用模型时,把输入数据传给它,会自动执行forward函数,以及一些后台操作。请不要直接调用model.forward()!
X = torch.rand(1, 28, 28, device=device)
logits = model(X)
pred_probab = nn.Softmax(dim=1)(logits)
y_pred = pred_probab.argmax(1)
print(f"Predicted class: {y_pred}")
模型参数:
parameters() 或 named_parameters() 方法访问所有参数
print("Model structure: ", model, "\n\n")for name, param in model.named_parameters():print(f"Layer: {name} | Size: {param.size()} | Values : {param[:2]} \n")自动微分
torch.autograd
PyTorch有一个内置的微分引擎,它支持对任何计算图的梯度进行自动计算。
import torchx = torch.ones(5) # input tensor
y = torch.zeros(3) # expected output
w = torch.randn(5, 3, requires_grad=True)
b = torch.randn(3, requires_grad=True)
z = torch.matmul(x, w)+b
loss = torch.nn.functional.binary_cross_entropy_with_logits(z, y)print('Gradient function for z =', z.grad_fn)
print('Gradient function for loss =', loss.grad_fn)#计算梯度
loss.backward()
print(w.grad)
print(b.grad)
- 我们只能获得计算图的叶子节点的grad属性,这些节点的requires_grad属性设置为True。对于我们图中的所有其他节点,梯度将不可用。
- 出于性能方面的考虑,我们只能在一个给定的图上使用一次backward来进行梯度计算。如果我们需要在同一个图上进行多次backward调用,我们需要在backward调用中传递 retain_graph=True。
禁止梯度跟踪
默认情况下,所有带有require_grad=True的tensor都在跟踪它们的计算历史并支持梯度计算。然而,在某些情况下,我们不需要这样做,例如,当我们已经训练好了模型,只是想把它应用于一些输入数据,也就是说,我们只想通过网络进行前向计算。我们可以通过用torch.no_grad()块包围我们的计算代码来停止跟踪计算。
z = torch.matmul(x, w)+b
print(z.requires_grad)with torch.no_grad():z = torch.matmul(x, w)+b
print(z.requires_grad)# 另一种做法
z = torch.matmul(x, w)+b
z_det = z.detach()
print(z_det.requires_grad)
禁用梯度跟踪:
- 将神经网络中的一些参数标记为冻结参数。这是对预训练的网络进行微调的一个非常常见的情况。
- 当你只做前向传递时,为了加快计算速度,对不跟踪梯度的tensor的计算会更有效率。
计算图
从概念上讲,autograd在一个由Function对象组成的有向无环图(DAG)中保存了数据(tensor)和所有执行的操作(以及产生的新tensor)的记录。在这个DAG中,叶子是输入tensor,根部是输出tensor。通过追踪这个图从根到叶,你可以使用链式规则自动计算梯度。
在一个前向传递中,autograd同时做两件事。
- 运行请求的操作,计算出一个结果tensor。
- 在DAG中维护该操作的梯度函数。
当在DAG根上调用.backward()时,后向传递开始了。
- 计算每个.grad_fn的梯度。
- 将它们累积到各自tensor的 .grad 属性中
- 使用链式规则,一直传播到叶子tensor。
注意:在PyTorch中,DAG是动态的。需要注意的是,图是从头开始重新创建的;在每次调用.backward()后,autograd开始填充一个新的图。这正是允许你在模型中使用控制流语句的原因;如果需要,你可以在每次迭代时改变形状、大小和操作。
tensor梯度和雅各布乘积
在许多情况下,我们有一个标量损失函数,我们需要计算相对于某些参数的梯度。然而,有些情况下,输出函数是一个任意的张量。在这种情况下,PyTorch允许你计算雅各布乘积,而不是实际的梯度。
对于一个矢量函数 ,其中,
和
,一个
相对于
的梯度是由Jacobian矩阵给出的。
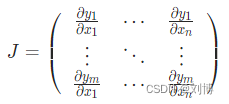
PyTorch允许你计算雅各布乘积,而不是计算雅各布矩阵本身。对于一个给定的输入矢量
。 这可以通过调用v作为参数的backward来实现。v的大小应该与原始张量的大小相同,我们要进行乘积计算。
inp = torch.eye(5, requires_grad=True)
out = (inp+1).pow(2)
out.backward(torch.ones_like(inp), retain_graph=True)
print("First call\n", inp.grad)
out.backward(torch.ones_like(inp), retain_graph=True)
print("\nSecond call\n", inp.grad)
inp.grad.zero_()
out.backward(torch.ones_like(inp), retain_graph=True)
print("\nCall after zeroing gradients\n", inp.grad)请注意,当我们第二次以相同的参数调用后向时,梯度的值是不同的。这是因为在进行向后传播时,PyTorch会累积梯度,也就是说,计算出的梯度值会加到计算图的所有叶子节点的梯度属性中。如果你想计算正确的梯度,你需要在计算梯度之前将梯度属性清零。在真实的训练中,优化器可以帮助我们做到这一点。
注意:之前我们在调用backward()函数的时候是不带参数的。这基本上等同于调用backward(torch.tensor(1.0)),这是在标量值函数的情况下计算梯度的有效方法,比如神经网络训练中的损失。
优化模型参数
训练模型是一个迭代的过程;在每个迭代中(称为epoch),模型对输出进行猜测,计算其猜测的误差(损失),收集误差相对于其参数的导数,并使用梯度下降优化这些参数。
import torch
from torch import nn
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision.transforms import ToTensor, Lambdatraining_data = datasets.FashionMNIST(root="data",train=True,download=True,transform=ToTensor()
)test_data = datasets.FashionMNIST(root="data",train=False,download=True,transform=ToTensor()
)train_dataloader = DataLoader(training_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)class NeuralNetwork(nn.Module):def __init__(self):super(NeuralNetwork, self).__init__()self.flatten = nn.Flatten()self.linear_relu_stack = nn.Sequential(nn.Linear(28*28, 512),nn.ReLU(),nn.Linear(512, 512),nn.ReLU(),nn.Linear(512, 10),)def forward(self, x):x = self.flatten(x)logits = self.linear_relu_stack(x)return logitsmodel = NeuralNetwork()超参数
我们为训练定义了以下超参数:
- epoch数 - 在数据集上迭代的次数
- 批量大小--在更新参数之前,通过网络传播的数据样本的数量。
- 学习率--在每个批次epoch更新模型参数的程度。较小的值产生缓慢的学习速度,而较大的值可能会导致训练期间的不可预测的行为。
learning_rate = 1e-3
batch_size = 64
epochs = 5优化循环的每一次迭代被称为一个epoch。
训练loop--在训练数据集上迭代,试图收敛到最佳参数。
验证/测试循环--迭代测试数据集,以检查模型性能是否在提高。
损失函数
nn.MSELoss(均方误差)
nn.NLLLoss(负对数似然)
nn.LogSoftmax
nn.CrossEntropyLoss
优化器
优化是在每个训练步骤中调整模型参数以减少模型误差的过程。
所有的优化逻辑都被封装在优化器对象中。SGD优化器;Adam和RMSProp,它们对不同类型的模型和数据有更好的效果。
调用optimizer.zero_grad()来重置模型参数的梯度。梯度默认为累加;为了防止重复计算,我们在每次迭代中明确地将其归零。
通过调用loss.backwards()对预测损失进行反向传播。PyTorch将损失的梯度与每个参数联系在一起。
一旦我们有了梯度,我们就可以调用optimizer.step()来根据向后传递中收集的梯度调整参数。
# Initialize the loss function
loss_fn = nn.CrossEntropyLoss()optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
执行
def train_loop(dataloader, model, loss_fn, optimizer):size = len(dataloader.dataset)for batch, (X, y) in enumerate(dataloader):# Compute prediction and losspred = model(X)loss = loss_fn(pred, y)# Backpropagationoptimizer.zero_grad()loss.backward()optimizer.step()if batch % 100 == 0:loss, current = loss.item(), batch * len(X)print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")def test_loop(dataloader, model, loss_fn):size = len(dataloader.dataset)num_batches = len(dataloader)test_loss, correct = 0, 0with torch.no_grad():for X, y in dataloader:pred = model(X)test_loss += loss_fn(pred, y).item()correct += (pred.argmax(1) == y).type(torch.float).sum().item()test_loss /= num_batchescorrect /= sizeprint(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)epochs = 10
for t in range(epochs):print(f"Epoch {t+1}\n-------------------------------")train_loop(train_dataloader, model, loss_fn, optimizer)test_loop(test_dataloader, model, loss_fn)
print("Done!")
保存于载入模型
保存、加载模型权重
import torch
import torch.onnx as onnx
import torchvision.models as models# 保存和载入模型的权重
model = models.vgg16(pretrained=True)
torch.save(model.state_dict(), 'model_weights.pth')# 加载模型的权重,你需要先创建一个相同模型的实例,然后用load_state_dict()方法加载参数。
model = models.vgg16() # we do not specify pretrained=True, i.e. do not load default weights
model.load_state_dict(torch.load('model_weights.pth'))
model.eval()
保存加载模型形状
在加载模型权重时,我们需要先将模型类实例化,因为该类定义了网络的结构。我们可能想把这个类的结构和模型一起保存,在这种情况下,我们可以把模型(而不是model.state_dict())传给保存函数。
torch.save(model, 'model.pth')model = torch.load('model.pth')
将模型导出为ONNX
PyTorch也有内置的ONNX导出支持。然而,由于PyTorch执行图的动态性质,导出过程必须遍历执行图以产生持久的ONNX模型。出于这个原因,应该向导出程序传递一个适当大小的测试变量(在我们的例子中,将创建一个正确形状且值为零的tensor)。
input_image = torch.zeros((1,3,224,224))
onnx.export(model, input_image, 'model.onnx')后续记录强化学习与深度强化学习的pytorch使用