目录
一、多重梯度下降multiple gradient descent algorithm (MGDA)
二、Gradient Normalization (GradNorm)
三、Uncertainty
多任务学习的优势不用说了,主要是可以合并模型,减小模型体积,只用一次推理也可以加快速度。对于任务表现的提升,可能不是那么明显,理论上来说相似的任务确实可以提高彼此的表现,但是在实际应用中,在减小模型的同时仅仅想要保持每一个任务的表现都不是那么容易。
总结来说,多任务学习的发展主要有两个方向:
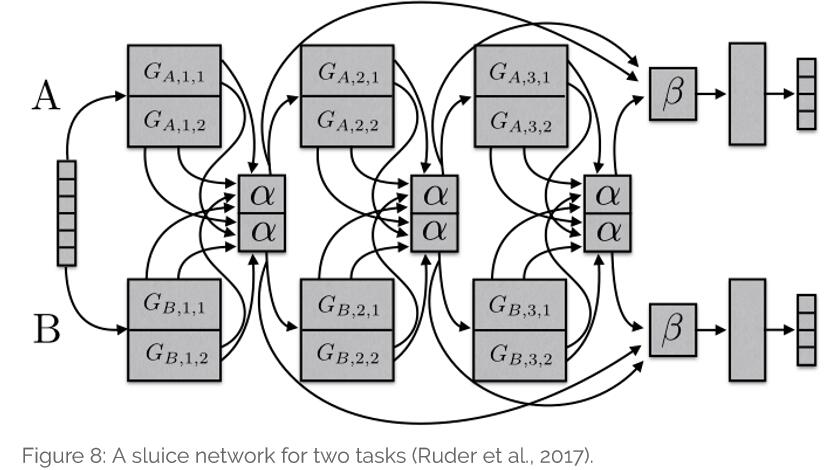
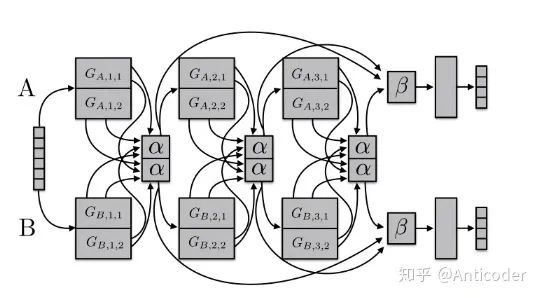
- 调整网络的结构以适应于多任务的学习。这种方法需要根据具体问题去更改网络结构,繁琐又难以再现。一般来说调整网络结构只能根据经验,调优起来也很不方便。
- 调整网络的loss来进行不同的任务融合。在这种思路中,更好的加权方式应该是动态的,根据不同任务学习的阶段,学习的难易程度,甚至是学习的效果来进行调整。
如果想要仔细了解多任务学习的发展历程,可以看看这篇Survey:Multi-Task Learning for Dense Prediction Tasks: A Survey。
以下主要介绍几种常用的多任务学习方法:MGDA,GradNorm,Uncertainty。
一、多重梯度下降multiple gradient descent algorithm (MGDA)
这个方法来自Intel Labs 2019年的一篇文章Multi-Task Learning as Multi-Objective Optimization,这篇文章的优化部分有点难,需要很多时间去理解。 如果要节省时间,建议直接拉GitHub上的代码下来对照着学习:https://github.com/intel-isl/MultiObjectiveOptimization。
作者的motivation是,由于任务之间不是完全竞争或者不竞争的关系,而是一种相互博弈的关系,这时候单纯的线性解就没那么有用了,所以需要去找到一个帕累托最优解来优化多个任务的表现,也就是,把多任务学习变成多目标优化问题。而在多目标优化算法中,就有一种叫MGDA的方法,它可以在共享参数的过程中优化多个任务的梯度。
为了利用MGDA方法,定义一个优化问题:

这个问题的解要么是满足KKT条件的点(鞍点),要么是梯度下降的方向。对不同的参数有不同的梯度下降:
- 在task-specific参数
上做一般的梯度下降(下图第2行)
- 在shared参数
上做
的梯度下降(下图第5行)
怎么去解这个问题呢?作者用的是2013年提出的Frank-Wolfe算法去解:
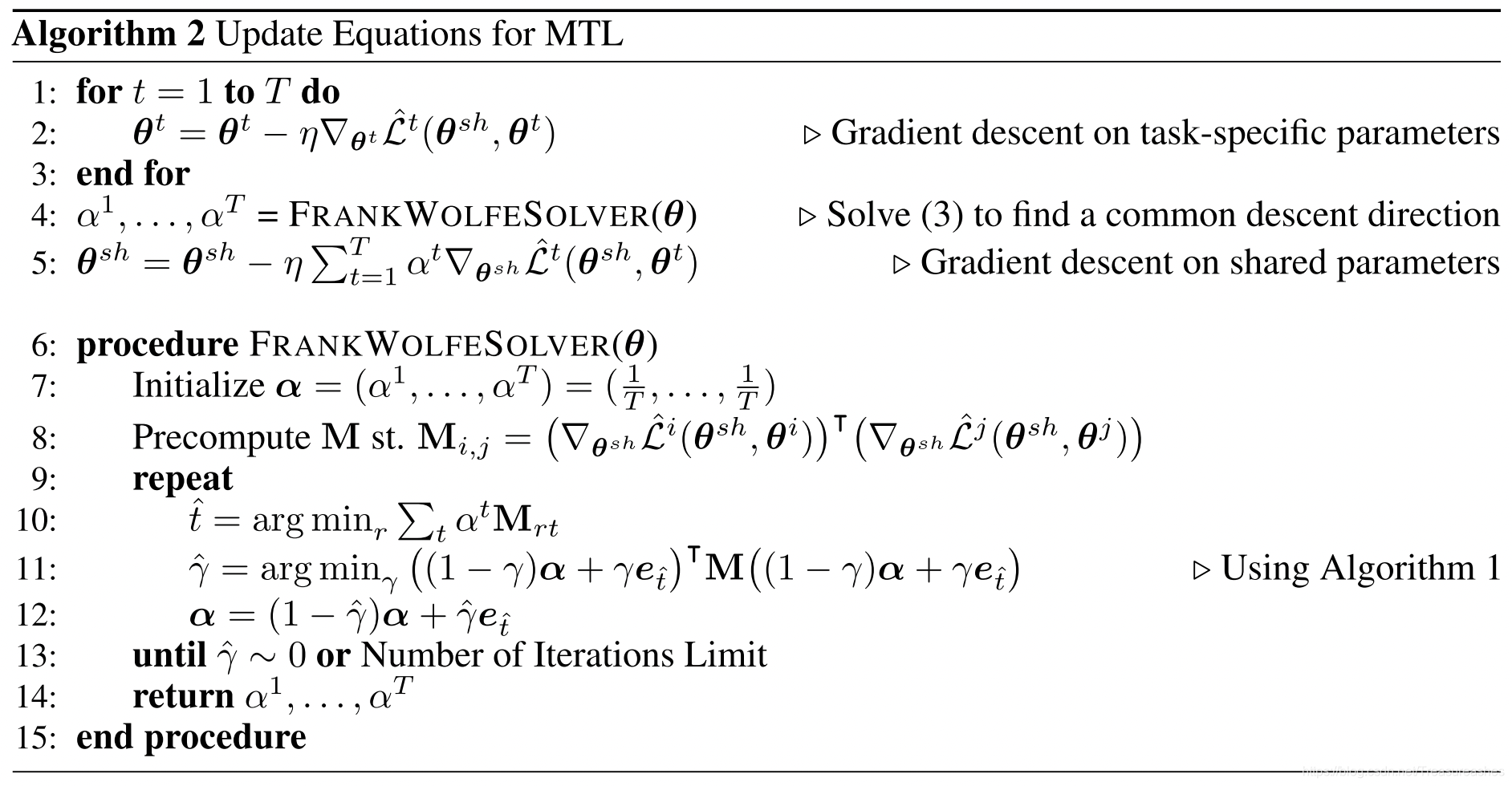
我们可以对比代码来看(以下MGDA及MGDA-UB的代码中,shared参数在低层,task- specific参数在高层,一般情况都是如此):
# This is MGDA 只有这一段与MGDA-UB有区别
for t in tasks:# Comptue gradients of each loss function wrt parametersoptimizer.zero_grad()rep, mask = model['rep'](images, mask) # 先基于shared参数进行推理out_t, masks[t] = model[t](rep, None) # 再基于task-specific参数进行推理loss = loss_fn[t](out_t, labels[t])loss_data[t] = loss.data[0]loss.backward() grads[t] = []# 一般的梯度下降(loss不缩放)for param in model['rep'].parameters():if param.grad is not None:grads[t].append(Variable(param.grad.data.clone(), requires_grad=False)) # 屏蔽预训练模型的权重# Frank-Wolfe iteration to compute scales. 利用FW算法计算loss的scale
sol, min_norm = MinNormSolver.find_min_norm_element([grads[t] for t in tasks])
for i, t in enumerate(tasks):scale[t] = float(sol[i])# Scaled back-propagation 按计算的scale缩放loss并反向传播
optimizer.zero_grad()
rep, _ = model['rep'](images, mask)
for i, t in enumerate(tasks):out_t, _ = model[t](rep, masks[t])loss_t = loss_fn[t](out_t, labels[t])loss_data[t] = loss_t.data[0]if i > 0:loss = loss + scale[t]*loss_telse:loss = scale[t]*loss_t
loss.backward()
optimizer.step()其中MinNormSolver.find_min_norm_element是调用FW算法来求比例值,作者提供了numpy和pytorch两个版本,对FW算法感兴趣的可以自行查看。
可以看出,MGDA将会对每一个任务进行反向传播,这个计算消耗是很大的,所以作者提出了MGDA-UB(upper bound)算法,该方法可以优化目标的上限,并且只需要单次向后传递。
从代码上来看,MGDA-UB只有第一段有区别:
- 不更新shared参数,只更新task-specific参数
- 使用记录的shared梯度值寻找帕累托最优
optimizer.zero_grad()
# First compute representations (z)
images_volatile = Variable(images.data, volatile=True)
rep, mask = model['rep'](images_volatile, mask) # MGDA-UB的shared节点不求导,不反向传播
# As an approximate solution we only need gradients for input 加载原有的参数作为输入来作为MGDA的近似
if isinstance(rep, list):# This is a hack to handle psp-net 对分割网络pspnet的特殊处理rep = rep[0]rep_variable = [Variable(rep.data.clone(), requires_grad=True)]list_rep = True
else:rep_variable = Variable(rep.data.clone(), requires_grad=True)list_rep = False# Compute gradients of each loss function wrt z
for t in tasks:optimizer.zero_grad()out_t, masks[t] = model[t](rep_variable, None) loss = loss_fn[t](out_t, labels[t])loss_data[t] = loss.data[0]loss.backward() grads[t] = []# 使用记录的shared梯度值if list_rep:grads[t].append(Variable(rep_variable[0].grad.data.clone(), requires_grad=False))rep_variable[0].grad.data.zero_()else:grads[t].append(Variable(rep_variable.grad.data.clone(), requires_grad=False))rep_variable.grad.data.zero_()仿真中显示,不论是在MultiMNIST(多目标检测),还是Multi-Label Classification(多标签分类),还是Scene Understanding(场景理解)的任务上,MGDA都表现得比接下来要介绍的GradNorm和Uncertainty这两种算法要好。
二、Gradient Normalization (GradNorm)
这个算法来自2018的一篇文章:GradNorm: Gradient Normalization for Adaptive Loss Balancing in Deep Multitask Networks
GradNorm中的‘Grad’来自于,除了每个任务的真实的数据标签与网络预测标签计算的Label loss,这篇文章定义的一种 Gradient Loss。这个Loss用来衡量每个任务的Label loss权重的好坏。
但是,如何去衡量呢?我们可以从Gradient Loss的组成来看:

其中,
是任务i梯度标准化的值,也就是参数(模型share部分最后一层的参数值)与loss 乘积的L2范数:
![]()
是全局梯度标准化的值(即所有任务梯度标准化值的期望值):
![]()
是任务的相对反向训练速度,为任务i的当前loss与参考loss的比值在所有任务中的相对大小,它越大,表示任务i在所有任务中训练越慢:
GradNorm的训练流程如下图所示:
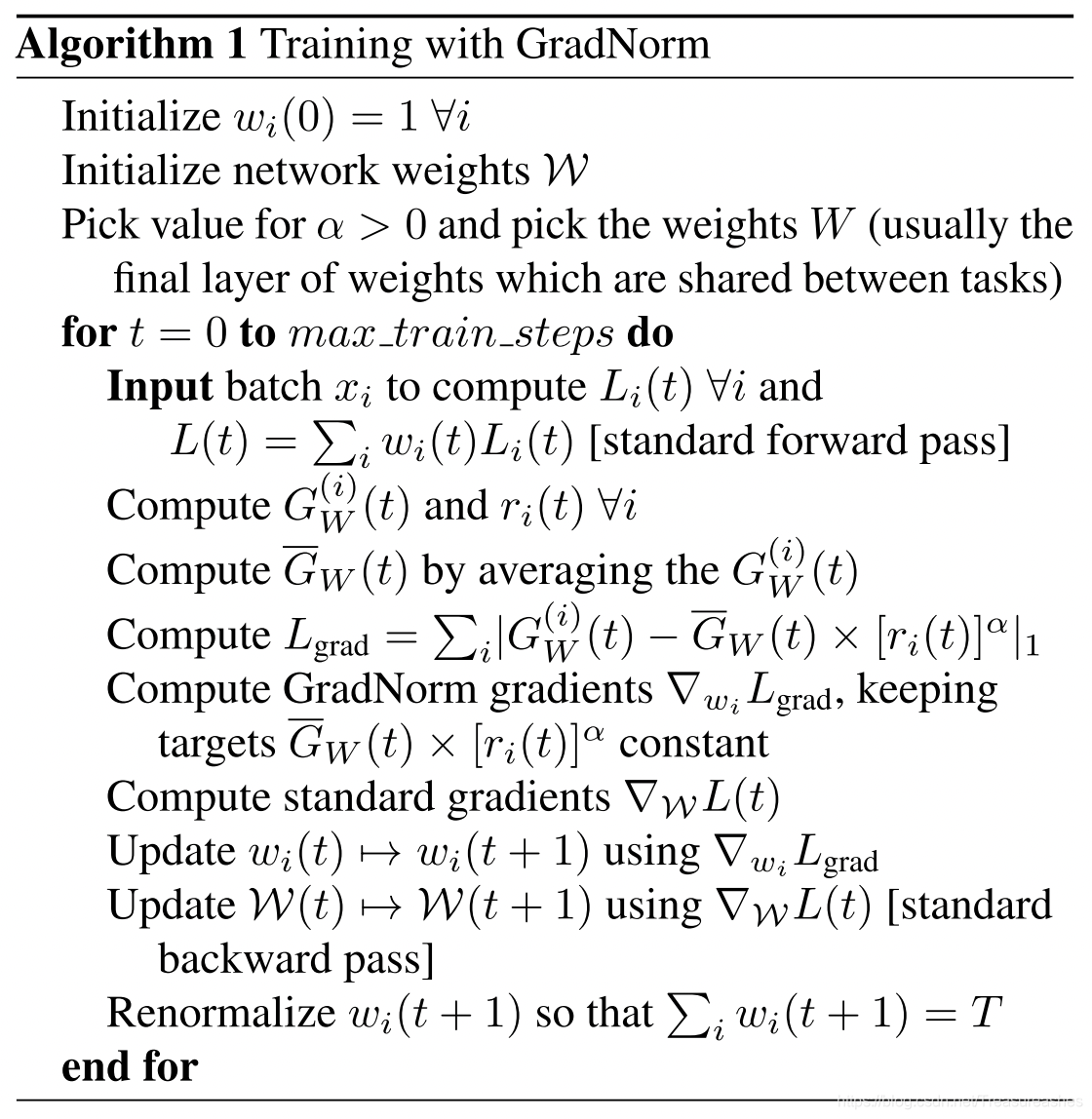
可以看出,训练思路是:
- 在基础的计算label loss之后,计算gradient loss。
- 然后根据gradient loss来更新wi,再根据label loss更新整个网络的参数。
- 最后将wi重新标准化(renormalize)。
Gradient Loss里的两个norm量和这最后一步的renormalize应该就是GradNorm中‘Norm’的由来。
我们可以看一下主要代码(https://github.com/brianlan/pytorch-grad-norm)是怎么实现的,其实就是按照上面的流程一步步来,很容易理解:
# get layer of shared weights
W = model.get_last_shared_layer()# get the gradient norms for each of the tasks
# G^{(i)}_w(t)
norms = []
for i in range(len(task_loss)):# get the gradient of this task loss with respect to the shared parametersgygw = torch.autograd.grad(task_loss[i], W.parameters(), retain_graph=True)# compute the normnorms.append(torch.norm(torch.mul(model.weights[i], gygw[0])))
norms = torch.stack(norms)# compute the inverse training rate r_i(t)
# \curl{L}_i
if torch.cuda.is_available():loss_ratio = task_loss.data.cpu().numpy() / initial_task_loss
else:loss_ratio = task_loss.data.numpy() / initial_task_loss
# r_i(t)
inverse_train_rate = loss_ratio / np.mean(loss_ratio)# compute the mean norm \tilde{G}_w(t)
if torch.cuda.is_available():mean_norm = np.mean(norms.data.cpu().numpy())
else:mean_norm = np.mean(norms.data.numpy())# compute the GradNorm loss
# this term has to remain constant
constant_term = torch.tensor(mean_norm * (inverse_train_rate ** args.alpha), requires_grad=False)
if torch.cuda.is_available():constant_term = constant_term.cuda()# this is the GradNorm loss itself
grad_norm_loss = torch.tensor(torch.sum(torch.abs(norms - constant_term)))
#print('GradNorm loss {}'.format(grad_norm_loss))# compute the gradient for the weights
model.weights.grad = torch.autograd.grad(grad_norm_loss, model.weights)[0]# renormalize
normalize_coeff = n_tasks / torch.sum(model.weights.data, dim=0)
model.weights.data = model.weights.data * normalize_coeff三、Uncertainty
这个方法是来自CVPR 2018年的一篇文章:Multi-Task Learning Using Uncertainty to Weigh Losses for Scene Geometry and Semantics
uncertainty指的是同质不确定性(Homoscedastic uncertainty),也就是task-dependent uncertainty,它与输入的数据无关,只表示任务之间的相对置信度,反映回归或分类任务中固有的不确定性。
它是用一个噪声参数来表示的,在Loss式中的和
:
可以看出,“简单”(不确定性小)的任务的loss将会有更高的权重值。
代码(https://github.com/oscarkey/multitask-learning)实现特别简单,只是把单个任务的loss变成uncertainty weight loss:
def weight_loss(self, loss: Tensor) -> Tensor:return 0.5 * torch.exp(-self._s) * loss + 0.5 * self._s对比单个任务loss的公式写法:
为什么这里的loss与上面的公式有所出入呢?
是因为在实际应用中,对数方差(the log variance)会比直接回归方差
(regressing the variance)在数值上更加稳定,因为它可以避免被零除的情况。又因为预测值
,所以
。
至于为什么最后用的是,作者的原话是:The exponential mapping also allows us to regress unconstrained scalar values, where exp(−s) is resolved to the positive domain giving valid values for variance. 也就是说,为了把标量限制在[0, 1]来表示方差,需要将exp函数作一个左右翻转,也就是
。这是weight loss的第一项。
因为,所以第二项
。
注:虽然这个方法比较简单,但是在我的试验中,训练过程模型特别难收敛。
相关链接:
Multi-task Learning(Review)多任务学习概述
多任务学习优化(Optimization in Multi-task learning)
Multi-Task Learning as Multi-Objective Optimization 阅读笔记
精读论文:Multi-Task Learning as Multi-Objective Optimization(附翻译)
Multi-Task Learning Using Uncertainty to Weigh Losses
GradNorm:Gradient Normalization for Adaptive Loss Balancing in Deep Multitask Networks,梯度归一化
Gradient Surgery for Multi-Task Learning