图的遍历
介绍
是从图的某一顶点出发,按照某种搜索方式对图中所有顶点访问一次且仅一次。图的遍历可以解决很多搜索问题,在实际中应用非常广泛。图的遍历根据搜索方式的不同,分为广度优先搜索和深度优先搜索。
一.深度优先遍历
1.1介绍
深度优先搜索(Depth First Search, DFS)是最常见的图搜索方法之一。深度优先搜索沿着一条路径一直走下去,无法行进时,回退到刚刚访问的节点,似“不撞南墙不回头,不到黄河不死心”。深度优先遍历是按照深度优先搜索的方式对图进行遍历。
深度优先遍历秘籍:后被访问的顶点,其邻接点先被访问。
根据深度优先遍历秘籍,后来先服务,可以借助于栈实现。递归本身就是使用栈实现的,因此使用递归方法更方便。
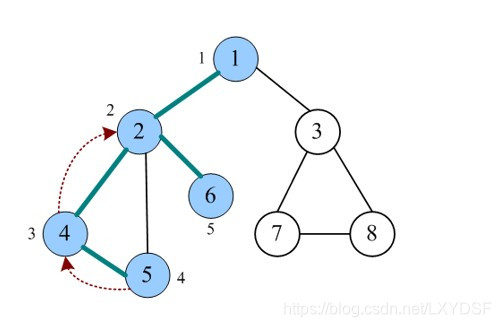
举例

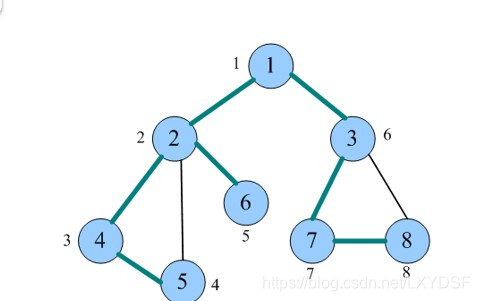
代码实现1—深度优先遍历邻接矩阵
//深度优先遍历 邻接矩阵
#include <iostream>
using namespace std;#define MaxVnum 100 //顶点数最大值
bool visited[MaxVnum]; //访问标志数组,其初值为"false"
typedef char VexType; //顶点的数据类型,根据需要定义
typedef int EdgeType; //边上权值的数据类型,若不带权值的图,则为0或1
typedef struct {VexType Vex[MaxVnum];EdgeType Edge[MaxVnum][MaxVnum];int vexnum, edgenum; //顶点数,边数
}AMGragh;int locatevex(AMGragh G, VexType x)
{for (int i = 0; i < G.vexnum; i++)//查找顶点信息的下标if (x == G.Vex[i])return i;return -1;//没找到
}void CreateAMGraph(AMGragh& G)//创建无向图的邻接矩阵
{int i, j;VexType u, v;cout << "请输入顶点数:" << endl;cin >> G.vexnum;cout << "请输入边数:" << endl;cin >> G.edgenum;cout << "请输入顶点信息:" << endl;for (int i = 0; i < G.vexnum; i++)//输入顶点信息,存入顶点信息数组cin >> G.Vex[i];for (int i = 0; i < G.vexnum; i++)//初始化邻接矩阵所有值为0,如果是网,则初始化邻接矩阵为无穷大for (int j = 0; j < G.vexnum; j++)G.Edge[i][j] = 0;cout << "请输入每条边依附的两个顶点:" << endl;while (G.edgenum--){cin >> u >> v;i = locatevex(G, u);//查找顶点u的存储下标j = locatevex(G, v);//查找顶点v的存储下标if (i != -1 && j != -1)G.Edge[i][j] = G.Edge[j][i] = 1; //邻接矩阵储置1,若有向图G.Edge[i][j]=1else{cout << "输入顶点信息错!请重新输入!" << endl;G.edgenum++;//本次输入不算}}
}void print(AMGragh G)//输出邻接矩阵
{cout << "图的邻接矩阵为:" << endl;for (int i = 0; i < G.vexnum; i++){for (int j = 0; j < G.vexnum; j++)cout << G.Edge[i][j] << "\t";cout << endl;}
}void DFS_AM(AMGragh G, int v)//基于邻接矩阵的深度优先遍历
{int w;cout << G.Vex[v] << "\t";visited[v] = true;for (w = 0; w < G.vexnum; w++)//依次检查v的所有邻接点{if (G.Edge[v][w] && !visited[w])//v,w邻接且w未被访问{DFS_AM(G, w);//从w顶点开始递归深度优先遍历}}
}//如果不是一个连通图,还需要进行验证.
void DFS_AM(AMGragh G)
{for (int i = 0; i < G.vexnum; i++)//检查未被访问的顶点{if (!visited[i]){DFS_AM(G, i);}}
}int main()
{int v;VexType c;AMGragh G;CreateAMGraph(G);print(G);cout << "请输入遍历连通图的起始点: ";cin >> c;v = locatevex(G, c);//查找顶点u的存储下标if (v != -1){cout << "深度优先搜索遍历连通图结果: " << endl;DFS_AM(G);}else {cout << "输入顶点信息错误!请重新输入!" << endl;}return 0;
}
运行结果1
如图:

代码实现2—深度优先遍历 邻接表
//深度优先遍历 邻接表
#include <iostream>
using namespace std;const int MaxVnum = 100;//顶点数最大值
bool visited[MaxVnum]; //访问标志数组,其初值为"false"
typedef char VexType;//顶点的数据类型为字符型typedef struct AdjNode { //定义邻接点类型int v; //邻接点下标struct AdjNode* next; //指向下一个邻接点
}AdjNode;typedef struct VexNode { //定义顶点类型VexType data; // VexType为顶点的数据类型,根据需要定义AdjNode* first; //指向第一个邻接点
}VexNode;typedef struct {//定义邻接表类型VexNode Vex[MaxVnum];int vexnum, edgenum; //顶点数,边数
}ALGragh;int locatevex(ALGragh G, VexType x)
{for (int i = 0; i < G.vexnum; i++)//查找顶点信息的下标if (x == G.Vex[i].data)return i;return -1;//没找到
}void insertedge(ALGragh& G, int i, int j)//插入一条边
{AdjNode* s;s = new AdjNode;s->v = j;s->next = G.Vex[i].first;G.Vex[i].first = s;
}void printg(ALGragh G)//输出邻接表
{cout << "----------邻接表如下:----------" << endl;for (int i = 0; i < G.vexnum; i++){AdjNode* t = G.Vex[i].first;cout << G.Vex[i].data << ": ";while (t != NULL){cout << "---->";cout << "[" << G.Vex[t->v].data << "]";t = t->next;}cout << endl;}
}
void CreateALGraph(ALGragh& G)//创建无向图邻接表
{int i, j;VexType u, v;cout << "请输入顶点数和边数:" << endl;cin >> G.vexnum >> G.edgenum;cout << "请输入顶点信息:" << endl;for (i = 0; i < G.vexnum; i++)//输入顶点信息,存入顶点信息数组cin >> G.Vex[i].data;for (i = 0; i < G.vexnum; i++)G.Vex[i].first = NULL;cout << "请依次输入每条边的两个顶点u,v" << endl;while (G.edgenum--){cin >> u >> v;i = locatevex(G, u);//查找顶点u的存储下标j = locatevex(G, v);//查找顶点v的存储下标if (i != -1 && j != -1){insertedge(G, i, j);//insertedge(G, j, i);//无向图多插入一条边}else{cout << "输入顶点信息错!请重新输入!" << endl;G.edgenum++;//本次输入不算}}
}void DFS_AL(ALGragh G, int v)//基于邻接表的深度优先遍历
{int w;AdjNode* p;//辅助指针cout << G.Vex[v].data << "\t";visited[v] = true;p = G.Vex[v].first;//获取该顶点的第一个邻接点while (p)//依次检查v的所有邻接点{w = p->v;//w为v的邻接点.if (!visited[w])//w未被访问,则从w出发,递归深度优先遍历{DFS_AL(G, w);}p = p->next;}
}void DFS_AL(ALGragh G) //非连通图,基于邻接表的深度优先遍历
{for(int i = 0; i < G.vexnum; i++)//检查未被访问的点.if (!visited[i]){DFS_AL(G, i);}
}int main()
{ALGragh G;int v;VexType c;CreateALGraph(G);//创建有向图邻接表printg(G);//输出cout << "请输入遍历连通图的起始点: ";cin >> c;v = locatevex(G, c);if (v != -1){cout << "深度优先搜索遍历连通图结果: " << endl;DFS_AL(G, v);DFS_AL(G);}else{cout << "输入顶点信息错误!请重新输入!" << endl;}return 0;
}
运行结果2
如图:



算法分析
- 基于邻接矩阵的DFS算法
查找每个顶点的邻接点需要O(n)时间,一共n个顶点,总的时间复杂度为O(n^2),使用了一个递归工作栈,空间复杂度为O(n)。- 基于邻接表的DFS算法
查找顶点vi的邻接点需要O(d(vi))时间,d(vi)为vi的出度(无向图为度),对有向图而言,所有顶点的出度之和等于边数e,对无向图而言,所有顶点的度之和等于2e,因此查找邻接点的时间复杂度为O(e),加上初始化时间O(n),总的时间复杂度为O(n+e),(由于n和e大小未知,所以时间复杂度两者都涉及)使用了一个递归工作栈,空间复杂度为O(n)。
二.广度优先遍历
2.1介绍
广度优先搜索(Breadth First Search, BFS),又称宽度优先搜索,是最常见的图搜索方法之一。广度优先搜索是从某个顶点(源点)出发,一次性访问所有未被访问的邻接点,再依次从这些访问过的邻接点出发……似水中涟漪,一层层地传播开来.
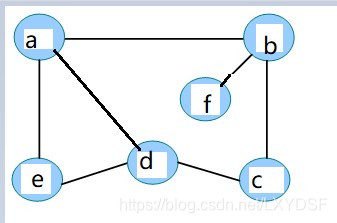
举例


广度优先遍历秘籍:先被访问的顶点,其邻接点先被访问。
根据广度优先遍历秘籍,先来先服务,可以借助于队列实现。每个节点访问一次且只访问一次,因此可以设置一个辅助数组visited[i]=false,表示第i个顶点未访问;visited[i]=true,表示第i个顶点已访问。
代码实现1—广度优先遍历邻接矩阵
#include <iostream>
#include <queue>//引入队列头文件
using namespace std;#define MaxVnum 100 //顶点数最大值
bool visited[MaxVnum]; //访问标志数组,其初值为"false"
typedef char VexType; //顶点的数据类型,根据需要定义
typedef int EdgeType; //边上权值的数据类型,若不带权值的图,则为0或1
typedef struct {VexType Vex[MaxVnum];EdgeType Edge[MaxVnum][MaxVnum];int vexnum, edgenum; //顶点数,边数
}AMGragh;int locatevex(AMGragh G, VexType x)
{for (int i = 0; i < G.vexnum; i++)//查找顶点信息的下标if (x == G.Vex[i])return i;return -1;//没找到
}void CreateAMGraph(AMGragh& G)//创建有向图的邻接矩阵
{int i, j;VexType u, v;cout << "请输入顶点数:" << endl;cin >> G.vexnum;cout << "请输入边数:" << endl;cin >> G.edgenum;cout << "请输入顶点信息:" << endl;for (int i = 0; i < G.vexnum; i++)//输入顶点信息,存入顶点信息数组cin >> G.Vex[i];for (int i = 0; i < G.vexnum; i++)//初始化邻接矩阵所有值为0,如果是网,则初始化邻接矩阵为无穷大for (int j = 0; j < G.vexnum; j++)G.Edge[i][j] = 0;cout << "请输入每条边依附的两个顶点:" << endl;while (G.edgenum--){cin >> u >> v;i = locatevex(G, u);//查找顶点u的存储下标j = locatevex(G, v);//查找顶点v的存储下标if (i != -1 && j != -1)G.Edge[i][j] = G.Edge[j][i] = 1; //邻接矩阵储置1,若无向图G.Edge[i][j]=G.Edge[j][i]=1else{cout << "输入顶点信息错!请重新输入!" << endl;G.edgenum++;//本次输入不算}}
}void print(AMGragh G)//输出邻接矩阵
{cout << "图的邻接矩阵为:" << endl;for (int i = 0; i < G.vexnum; i++){for (int j = 0; j < G.vexnum; j++)cout << G.Edge[i][j] << "\t";cout << endl;}
}void BFS_AM(AMGragh G, int v)
{int u, w;queue<int> Q;//创建一个队列,里面存放节点的下标cout << G.Vex[v] << "\t";visited[v] = true;Q.push(v);//源点v入队while (!Q.empty()){u = Q.front();//取对头Q.pop();for (w = 0; w < G.vexnum; w++)//一次检查u的所有邻接点{if (G.Edge[u][w] && !visited[w])//是邻接点但没有访问则进行访问{cout << G.Vex[w] << "\t";visited[w] = true;Q.push(w);}}}
}void BFS_AM(AMGragh G){for(int i = 0; i < G.vexnum; i++){if(!visited[i]){BFS_AM(G,i); }}
}int main()
{int v;VexType c;AMGragh G;CreateAMGraph(G);print(G);cout << "请输入遍历连通图的起始点: ";cin >> c;v = locatevex(G, c);//查找顶点u的存储下标if (v != -1){cout << "广度优先搜索遍历连通图结果: " << endl;BFS_AM(G, v);BFS_AM(G);}else {cout << "输入顶点信息错! 请重新输入!" << endl;}return 0;
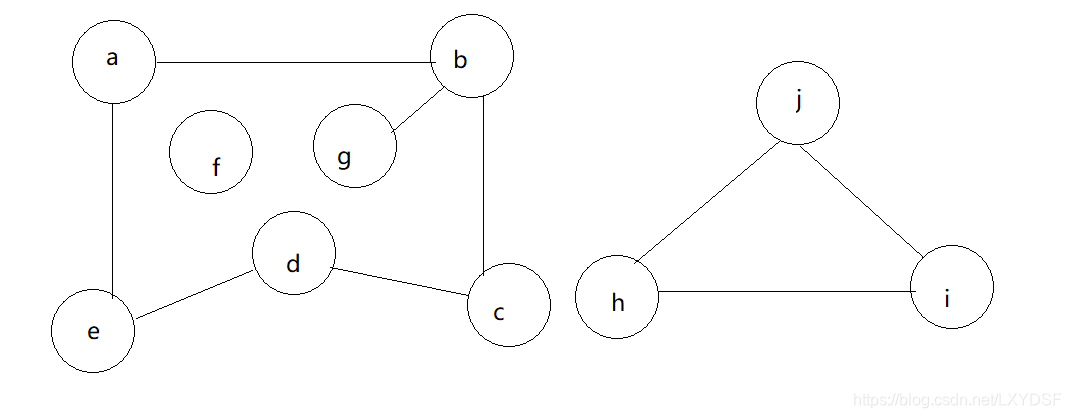
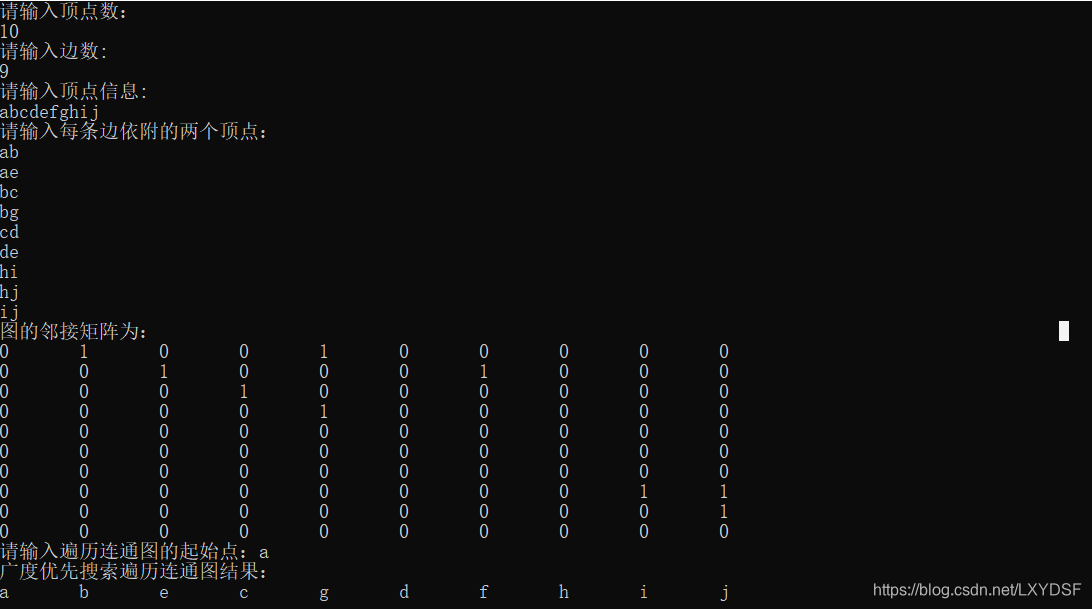
}运行结果1
如图:

代码实现2—广度优先遍历邻接表
#include <iostream>
#include <queue>//引入队列头文件
using namespace std;const int MaxVnum = 100;//顶点数最大值
bool visited[MaxVnum]; //访问标志数组,其初值为"false"
typedef char VexType;//顶点的数据类型为字符型typedef struct AdjNode { //定义邻接点类型int v; //邻接点下标struct AdjNode* next; //指向下一个邻接点
}AdjNode;typedef struct VexNode { //定义顶点类型VexType data; // VexType为顶点的数据类型,根据需要定义AdjNode* first; //指向第一个邻接点
}VexNode;typedef struct {//定义邻接表类型VexNode Vex[MaxVnum];int vexnum, edgenum; //顶点数,边数
}ALGragh;int locatevex(ALGragh G, VexType x)
{for (int i = 0; i < G.vexnum; i++)//查找顶点信息的下标if (x == G.Vex[i].data)return i;return -1;//没找到
}void insertedge(ALGragh& G, int i, int j)//插入一条边
{AdjNode* s;s = new AdjNode;s->v = j;s->next = G.Vex[i].first;G.Vex[i].first = s;
}void printg(ALGragh G)//输出邻接表
{cout << "----------邻接表如下:----------" << endl;for (int i = 0; i < G.vexnum; i++){AdjNode* t = G.Vex[i].first;cout << G.Vex[i].data << ": ";while (t != NULL){cout << "---->";cout << "[" << G.Vex[t->v].data << "]";t = t->next;}cout << endl;}
}void CreateALGraph(ALGragh& G)//创建有向图邻接表
{int i, j;VexType u, v;cout << "请输入顶点数和边数:" << endl;cin >> G.vexnum >> G.edgenum;cout << "请输入顶点信息:" << endl;for (i = 0; i < G.vexnum; i++)//输入顶点信息,存入顶点信息数组cin >> G.Vex[i].data;for (i = 0; i < G.vexnum; i++)G.Vex[i].first = NULL;cout << "请依次输入每条边的两个顶点u,v" << endl;while (G.edgenum--){cin >> u >> v;i = locatevex(G, u);//查找顶点u的存储下标j = locatevex(G, v);//查找顶点v的存储下标if (i != -1 && j != -1)insertedge(G, i, j);else{cout << "输入顶点信息错!请重新输入!" << endl;G.edgenum++;//本次输入不算}}
}void BFS_AL(ALGragh G, int v)//基于邻接表的广度优先遍历
{int u, w;AdjNode* p;queue<int> Q;cout << G.Vex[v].data << "\t";visited[v] = true;Q.push(v);while (!Q.empty()){u = Q.front();//取对头元素Q.pop();p = G.Vex[u].first;while (p){w = p->v;if (!visited[w])//w未被访问{cout << G.Vex[w].data << "\t";visited[w] = true;Q.push(w);}p = p->next;}}
}void BFS_AL(ALGragh G)//非连通图,基于邻接表的广度优先遍历
{for (int i = 0; i < G.vexnum; i++)//查漏点.{if (!visited[i])//未被访问则进行访问{BFS_AL(G, i);}}
}int main()
{ALGragh G;int v;VexType c;CreateALGraph(G);//创建有向邻接表printg(G);//输出cout << "请输入遍历连通图的起始点: ";cin >> c;v = locatevex(G, c);//查找顶点u的存储下标if (v != -1){cout << "广度优先搜索遍历连通图结构: " << endl;BFS_AL(G, v);BFS_AL(G);}else{cout << "输入顶点错!请重新输入!" << endl;}return 0;
}
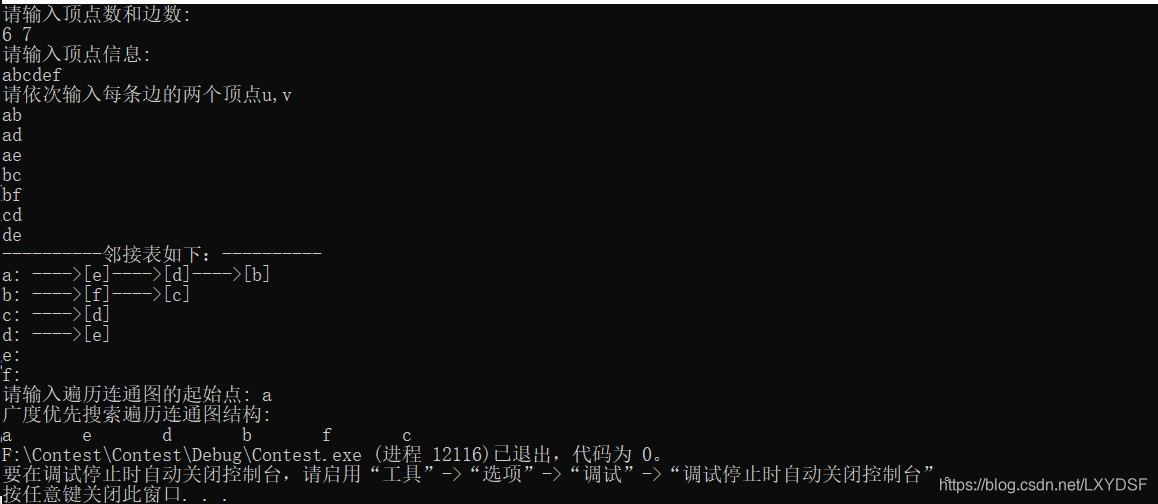
运行结果2
如图:

算法分析
- 基于邻接矩阵的BFS算法
查找每个顶点的邻接点需要O(n)时间,一共n个顶点,总的时间复杂度为O(n^2),使用了一个辅助队列,最坏的情况下每个顶点入队一次(访问完就入队),空间复杂度为O(n)。- 基于邻接表的BFS算法
查找顶点vi的邻接点需要O(d(vi))时间,d(vi)为vi的出度(无向图为度),对有向图而言,所有顶点的出度之和等于边数e,对无向图而言,所有顶点的度之和等于2e,因此查找邻接点的时间复杂度为O(e),加上初始化时间O(n),总的时间复杂度为O(n+e),使用了一个辅助队列,最坏的情况下每个顶点入队一次,空间复杂度为O(n)。
总结
- 容易发现,广度优先和深度优先的算法效率基本相同,在实际应用中要根据需要合理选择.
- 需要注意的是,一个图的邻接矩阵是唯一的,因此基于邻接矩阵的BFS或DFS遍历序列也是唯一的。而图的邻接表不是唯一的,边的输入顺序不同,正序或逆序建表都会影响邻接表的邻接点顺序,因此基于邻接表的BFS或DFS遍历序列不是唯一的。





![No converter for [class xxx] Content-Type ‘appliction/octet-stream;charset=UTF-8‘ 的解决办法](https://img-blog.csdnimg.cn/20210914165508357.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBARExfamlhbmdsaW4=,size_20,color_FFFFFF,t_70,g_se,x_16)