目录
前言:整体系统框图
一、OV7670摄像头简介
二、OV7670 SCCB协议简介
三、OV7670初始化寄存器配置
四、OV7670初始化代码编写
五、什么是DVP?
六、摄像头写数据请求
七、顶层文件编写
八、效果
前言:整体系统框图
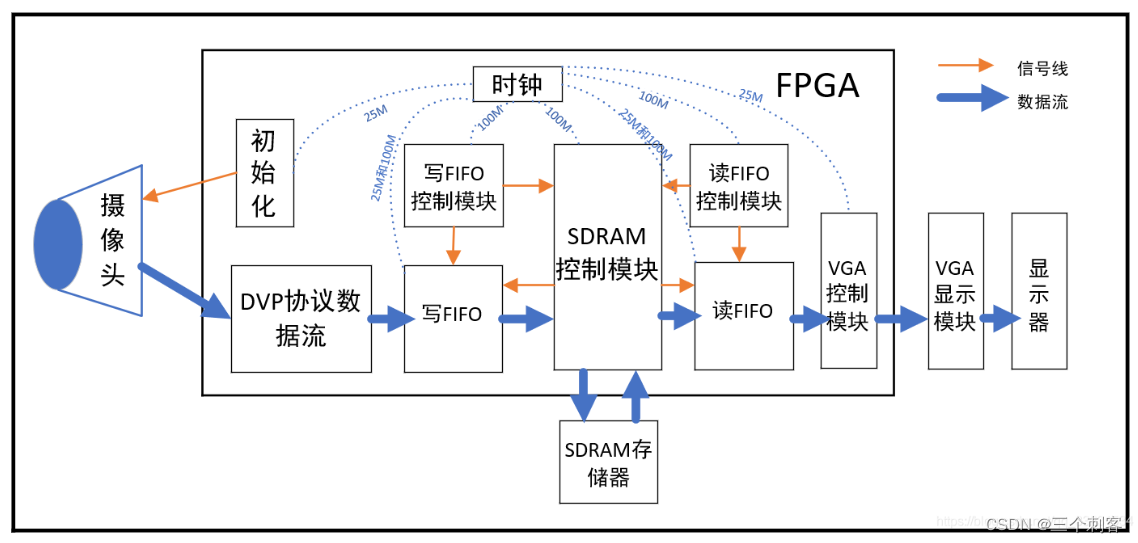
如图所示,FPGA中主要模块包含:时钟模块、OV7670初始化模块、DVP协议数据流模块、写FIFO模块、写FIFO控制模块、SDRAM控制模块、读FIFO模块、读FIFO控制模块、VGA控制模块。
其整体流程为:启动时先对摄像头进行初始化设置,初始化完成后,FPGA从摄像头获取一帧一帧的图像数据,根据数据手册将ov7670数据流转换成我们需要的RGB565数据流,随后存入写FIFO模块;(写控制模块)当写FIFO模块中存储的数据大于等于8时,发出SDRAM写请求,SDRAM写请求通过后,读取FIFO数据存储起来;(读FIFO模块)当读FIFO数据小于等于8时,读取SDRAM中的数据经过读FIFO缓存后送入VGA显示模块进行显示。同时写控制模块和读控制模块控制SDRAM读写地址的增加。
1、时钟模块
这里使用PLL的IP核,以50MHz时钟生成25MHz和100MHz时钟,其中摄像头初始化模块和VGA控制模块使用的是25MHz,SDRAM控制模块、写FIFO控制模块和读FIFO控制模块使用的是100MHz,写FIFO和读FIFO模块都是异步FIFO,使用25MHz和100MHz时钟。
一、OV7670摄像头简介
OV7670/OV7171 图像传感器,体积小、工作电压低,提供单片VGA摄像头和影像处理器的所有功能。通过SCCB 总线控制,可以输出整帧、子采样、取窗口等方式的各种分辨率8位影响数据。该产品VGA图像最高达到30帧/秒。用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、白平衡、饱和度、色度等都可以通过SCCB接口编程。OmmiVision 图像传感器应用独有的传感器技术,通过减少或消除光学或电子缺陷如固定图案噪声、托尾、浮散等,提高图像质量,得到清晰的稳定的彩色图像。
主要引出的信号引脚如下:
3.3V--输入电源电压(推荐使用3.3V,5V也可,但不推荐)
GND
SCL(SIOC):SCCB时钟口(注意:部分单片机需要上拉控制,和I2C接口类似)
SDA(SIOD):SCCB数据口(注意:部分单片机需要上拉控制,和I2C接口类似)
VSYNC:场同步(帧同步)信号(输出信号)
HREF:行同步信号(输出信号,一般可以不使用,特殊情况使用)
PCLK:像素时钟
XCLK:系统时钟输入
D0-D7:数据位(输出信号)
RESET:初始化所有寄存器到默认值 0:RESET 模式 1:一般模式
PWDN:POWER DOWN模式选择 0:工作 1:POWER DOWN
其中,对OV7670初始化配置只使用SCL和SDA两个信号线。
所用模块如图:

二、OV7670 SCCB协议简介
对OV7670初始化使用的是SCCB协议,由数据线SDA和时钟线SCL组成,SCCB协议和I2C协议基本一样,是简化的I2C协议,前面博客中已经讲过I2C协议,需要可以去看看。
SCCB(SeriaI Camera ControlBus)是简化的I2C协议,SIO-l是串行时钟输入线,SIO-O是串行双向数据线,分别相当于I2C协议的SCL和SDA。SCCB的总线时序与I2C基本相同,它的响应信号ACK被称为一个传输单元的第9位,分为Don’t care和NA。Don’t care位由从机产生;NA位由主机产生,由于SCCB不支持多字节的读写,NA位必须为高电平。另外,SCCB没有重复起始的概念,因此在SCCB的读周期中,当主机发送完片内寄存器地址后,必须发送总线停止条件。不然在发送读命令时,从机将不能产生Don’t care响应信号。
这里采用的是100KHz的SCL。
三、OV7670初始化寄存器配置
OV7670摄像头共201个寄存器,需要配置的有一百六十几个,这个具体看数据手册吧,下边代码中会有配置寄存器的数据。
四、OV7670初始化代码编写
`timescale 1 ns / 1 ns
module system_ctrl
(input clk, //50MHzinput rst_n, //global resetoutput sys_rst_n, //system resetoutput clk_c0, output clk_c1,output clk_c2, //-75degoutput clk_c3 //-75deg
);//----------------------------------------------
//rst_n synchronism, is controlled by the input clk
reg rst_nr1,rst_nr2;
always @(posedge clk or negedge rst_n)
beginif(!rst_n)beginrst_nr1 <= 1'b0;rst_nr2 <= 1'b0;endelsebeginrst_nr1 <= 1'b1;rst_nr2 <= rst_nr1;end
end//----------------------------------
//component instantiation for system_delay
wire delay_done;
system_delay u_system_delay
(.clk (clk),.rst_n (rst_nr2),.delay_done (delay_done)
);
wire pll_rst = ~rst_nr2 & ~delay_done; //active High//----------------------------------------------
//Component instantiation
wire locked;
sdram_pll u_sdram_pll
(.inclk0 (clk),.areset (pll_rst),.locked (locked),.c0 (clk_c0),.c1 (clk_c1),.c2 (clk_c2),.c3 (clk_c3)
);//----------------------------------------------
//sys_rst_n synchronism, is control by the highest output clkwire sysrst_nr0 = rst_nr2 & locked & delay_done;
reg sysrst_nr1, sysrst_nr2;
always @(posedge clk_c1 or negedge sysrst_nr0)
beginif(!sysrst_nr0) beginsysrst_nr1 <= 1'b0;sysrst_nr2 <= 1'b0;end else beginsysrst_nr1 <= 1'b1;sysrst_nr2 <= sysrst_nr1;end
end
assign sys_rst_n = sysrst_nr2; //active Lowendmodule//################################################//
//################################################//module system_delay
(input clk, //50MHzinput rst_n,output delay_done
);//------------------------------------------
// Delay 100ms for steady state
localparam DELAY_CNT = 23'd100_0000; //50ms
reg [22:0] cnt;
always@(posedge clk or negedge rst_n)
beginif(!rst_n)cnt <= 0;elsebeginif(cnt < DELAY_CNT) //1mscnt <= cnt + 1'b1;elsecnt <= cnt;end
end//------------------------------------------
//sys_rst_n synchronism
assign delay_done = (cnt == DELAY_CNT)? 1'b1 : 1'b0;endmodule
摄像头检测代码
`timescale 1ns/1ns
module CMOS_Capture
(//Global Clockinput iCLK, //25MHzinput iRST_N,//I2C Initilize Doneinput Init_Done, //Init Done//Sensor Interfaceoutput CMOS_RST_N, //cmos work state(5ms delay for sccb config)output CMOS_PWDN, //cmos power on output CMOS_XCLK, //25MHzinput CMOS_PCLK, //25MHzinput [7:0] CMOS_iDATA, //CMOS Datainput CMOS_VSYNC, //L: Vaildinput CMOS_HREF, //H: Vaild//Ouput Sensor Dataoutput reg CMOS_oCLK, //1/2 PCLKoutput reg [15:0] CMOS_oDATA, //16Bits RGB output reg CMOS_VALID, //Data Enableoutput reg [7:0] CMOS_FPS_DATA //cmos fps
);
assign CMOS_RST_N = 1'b1; //cmos work state(5ms delay for sccb config)
assign CMOS_PWDN = 1'b0; //cmos power on
assign CMOS_XCLK = iCLK; //25MHz XCLK//-----------------------------------------------------
//同步输入//Sensor HS & VS Vaild Capture
/**************************************************
________ ________
VS |_________________________________|
HS _______ _______
_____________| |__...___| |____________
**************************************************//*
//----------------------------------------------
reg mCMOS_HREF; //行同步:高电平有效
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)mCMOS_HREF <= 0;elsemCMOS_HREF <= CMOS_HREF;
end
wire CMOS_HREF_over = ({mCMOS_HREF,CMOS_HREF} == 2'b10) ? 1'b1 : 1'b0; //HREF 下降沿结束
*///----------------------------------------------
reg mCMOS_VSYNC;
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)mCMOS_VSYNC <= 1;elsemCMOS_VSYNC <= CMOS_VSYNC; //场同步:低电平有效
end
wire CMOS_VSYNC_over = ({mCMOS_VSYNC,CMOS_VSYNC} == 2'b01) ? 1'b1 : 1'b0; //VSYNC上升沿结束/*
//--------------------------------------------
//Counter the HS & VS Pixel
localparam H_DISP = 12'd640;
localparam V_DISP = 12'd480;
reg [11:0] X_Cont; //640
reg [11:0] Y_Cont; //480
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)X_Cont <= 0;else if(~CMOS_VSYNC & CMOS_HREF) //场信号有效X_Cont <= (byte_state == 1'b1) ? X_Cont + 1'b1 : X_Cont;elseX_Cont <= 0;
endalways@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)Y_Cont <= 0;else if(CMOS_VSYNC == 1'b0)beginif(CMOS_HREF_over == 1'b1) //HREF下降沿 一行结束Y_Cont <= Y_Cont + 1'b1;endelseY_Cont <= 0;
end
*///-----------------------------------------------------
//Change the sensor data from 8 bits to 16 bits.
reg byte_state; //byte state count
reg [7:0] Pre_CMOS_iDATA;
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)beginbyte_state <= 0;Pre_CMOS_iDATA <= 8'd0;CMOS_oDATA <= 16'd0;endelsebeginif(~CMOS_VSYNC & CMOS_HREF) //行场有效,{first_byte, second_byte} beginbyte_state <= byte_state + 1'b1; //(RGB565 = {first_byte, second_byte})case(byte_state)1'b0 : Pre_CMOS_iDATA[7:0] <= CMOS_iDATA;1'b1 : CMOS_oDATA[15:0] <= {Pre_CMOS_iDATA[7:0], CMOS_iDATA[7:0]};endcaseendelsebeginbyte_state <= 0;Pre_CMOS_iDATA <= 8'd0;CMOS_oDATA <= CMOS_oDATA;endend
end//--------------------------------------------
//Wait for Sensor output Data valid, 10 Franme
reg [3:0] Frame_Cont;
reg Frame_valid;
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)beginFrame_Cont <= 0;Frame_valid <= 0;endelse if(Init_Done) //CMOS I2C初始化完毕beginif(CMOS_VSYNC_over == 1'b1) //VS上升沿,1帧写入完毕beginif(Frame_Cont < 12)beginFrame_Cont <= Frame_Cont + 1'b1;Frame_valid <= 1'b0;endelsebeginFrame_Cont <= Frame_Cont;Frame_valid <= 1'b1; //数据输出有效endendend
end//-----------------------------------------------------
//CMOS_DATA数据同步输出使能时钟
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)CMOS_oCLK <= 0;else if(Frame_valid == 1'b1 && byte_state)//(X_Cont >= 12'd1 && X_Cont <= H_DISP))CMOS_oCLK <= ~CMOS_oCLK;elseCMOS_oCLK <= 0;
end//----------------------------------------------------
//数据输出有效CMOS_VALID
always@(posedge CMOS_PCLK or negedge iRST_N)
beginif(!iRST_N)CMOS_VALID <= 0;else if(Frame_valid == 1'b1)CMOS_VALID <= ~CMOS_VSYNC;elseCMOS_VALID <= 0;
end/************************************************************Caculate Frame Rate per second
*************************************************************/
//-----------------------------------------------------
// 2s 延时函数
reg [25:0] delay_cnt; //25_000000 * 2
always@(posedge iCLK or negedge iRST_N)
beginif(!iRST_N)delay_cnt <= 0;else if(Frame_valid)beginif(delay_cnt < 26'd50_000000)delay_cnt <= delay_cnt + 1'b1;elsedelay_cnt <= 0;endelsedelay_cnt <= 0;
end
wire delay_2s = (delay_cnt == 26'd50_000000) ? 1'b1 : 1'b0;//-------------------------------------------
//帧率采样计算
reg fps_state;
reg [7:0] fps_data;
always@(posedge iCLK or negedge iRST_N)
beginif(!iRST_N)beginfps_data <= 0;fps_state <= 0;CMOS_FPS_DATA <= 0;endelse if(Frame_valid)begincase(fps_state)0: beginCMOS_FPS_DATA <= CMOS_FPS_DATA;if(delay_2s == 0)beginfps_state <= 0;if(CMOS_VSYNC_over == 1'b1) //VS上升沿,1帧写入完毕fps_data <= fps_data + 1'b1;endelsefps_state <= 1;end1: beginfps_state <= 0;fps_data <= 0;CMOS_FPS_DATA <= fps_data >>1;endendcaseendelsebeginfps_data <= 0;fps_state <= 0;CMOS_FPS_DATA <= 0;end
endendmodule摄像头开机定时要求
//camera power on timing requirement
module power_on_delay(clk_50M,reset_n,camera_rstn,camera_pwnd,initial_en);
input clk_50M;
input reset_n;
output camera_rstn;
output camera_pwnd;
output initial_en;
reg [18:0]cnt1;
reg [15:0]cnt2;
reg [19:0]cnt3;
reg initial_en;
reg camera_rstn_reg;
reg camera_pwnd_reg;assign camera_rstn=camera_rstn_reg;
assign camera_pwnd=camera_pwnd_reg;//5ms, delay from sensor power up stable to Pwdn pull down
always@(posedge clk_50M)
beginif(reset_n==1'b0) begincnt1<=0;camera_pwnd_reg<=1'b1; endelse if(cnt1<18'h40000) begincnt1<=cnt1+1'b1;camera_pwnd_reg<=1'b1;endelsecamera_pwnd_reg<=1'b0;
end//1.3ms, delay from pwdn low to resetb pull up
always@(posedge clk_50M)
beginif(camera_pwnd_reg==1) begincnt2<=0;camera_rstn_reg<=1'b0; endelse if(cnt2<16'hffff) begincnt2<=cnt2+1'b1;camera_rstn_reg<=1'b0;endelsecamera_rstn_reg<=1'b1;
end//21ms, delay from resetb pul high to SCCB initialization
always@(posedge clk_50M)
beginif(camera_rstn_reg==0) begincnt3<=0;initial_en<=1'b0;endelse if(cnt3<20'hfffff) begincnt3<=cnt3+1'b1;initial_en<=1'b0;endelseinitial_en<=1'b1;
endendmodule
sdram_vga_top
module sdram_vga_top
(//global clockinput clk_vga, //vga clockinput clk_ref, //sdram ctrl clockinput clk_refout, //sdram clock outputinput rst_n, //global reset//sdram controloutput sdram_clk, //sdram clockoutput sdram_cke, //sdram clock enableoutput sdram_cs_n, //sdram chip selectoutput sdram_we_n, //sdram write enableoutput sdram_cas_n, //sdram column address strobeoutput sdram_ras_n, //sdram row address strobeoutput sdram_udqm, //sdram data enable (H:8)output sdram_ldqm, //sdram data enable (L:8)output [1:0] sdram_ba, //sdram bank addressoutput [11:0] sdram_addr, //sdram addressinout [15:0] sdram_data, //sdram data//lcd portoutput lcd_dclk, //lcd pixel clock output lcd_hs, //lcd horizontal sync output lcd_vs, //lcd vertical syncoutput lcd_sync, //lcd syncoutput lcd_blank, //lcd blank(L:blank)output [4:0] lcd_red, //lcd red dataoutput [5:0] lcd_green, //lcd green dataoutput [4:0] lcd_blue, //lcd blue data//user interfaceinput clk_write, //fifo write clockinput sys_we, //fifo write enableinput [15:0] sys_data_in, //fifo data inputoutput sdram_init_done,//sdram init doneinput frame_valid //frame valid
);//----------------------------------------------
wire sys_rd; //fifo read enable
wire [15:0] sys_data_out; //fifo data output
wire lcd_framesync; //lcd frame sync
wire frame_write_done; //sdram write frame done
wire frame_read_done; //sdram read frame done
wire [1:0] wr_bank; //sdram write bank
wire [1:0] rd_bank; //sdram read bank
wire wr_load; //sdram write address reset
wire rd_load; //sdram read address reset
sdram_2fifo_top u_sdram_2fifo_top
(//global clock.clk_ref (clk_ref), //sdram reference clock.clk_refout (clk_refout), //sdram clk input .clk_write (clk_write), //fifo data write clock.clk_read (clk_vga), //fifo data read clock.rst_n (rst_n), //global reset//sdram interface.sdram_clk (sdram_clk), //sdram clock .sdram_cke (sdram_cke), //sdram clock enable .sdram_cs_n (sdram_cs_n), //sdram chip select .sdram_we_n (sdram_we_n), //sdram write enable .sdram_ras_n (sdram_ras_n), //sdram column address strobe .sdram_cas_n (sdram_cas_n), //sdram row address strobe .sdram_ba (sdram_ba), //sdram data enable (H:8) .sdram_addr (sdram_addr), //sdram data enable (L:8) .sdram_data (sdram_data), //sdram bank address .sdram_udqm (sdram_udqm), //sdram address .sdram_ldqm (sdram_ldqm), //sdram data//user interface//burst and addr.wr_length (9'd256), //sdram write burst length.rd_length (9'd256), //sdram read burst length.wr_addr ({wr_bank,20'd0}), //sdram start write address.wr_max_addr ({wr_bank,20'd307200}), //sdram max write address.wr_load (wr_load), //sdram write address reset.rd_addr ({rd_bank,20'd0}), //sdram start read address.rd_max_addr ({rd_bank,20'd307200}), //sdram max read address.rd_load (rd_load), //sdram read address reset//dcfifo interface.sdram_init_done (sdram_init_done), //sdram init done.frame_write_done (frame_write_done), //sdram write one frame.frame_read_done (frame_read_done), //sdram read one frame.sys_we (sys_we), //fifo write enable.sys_data_in (sys_data_in), //fifo data input.sys_rd (sys_rd), //fifo read enable.sys_data_out (sys_data_out), //fifo data output.data_valid (lcd_framesync) //system data output enable
);//-----------------------------
sdbank_switch u_sdbank_switch
(.clk (clk_write),.rst_n (rst_n),.bank_valid (frame_valid),.frame_write_done (frame_write_done),.frame_read_done (frame_read_done),.wr_bank (wr_bank),.rd_bank (rd_bank),.wr_load (wr_load),.rd_load (rd_load)
);//---------------------------------
//display on lcd
wire [10:0] lcd_xpos;
wire [10:0] lcd_ypos;
wire [15:0] lcd_data;
assign lcd_data = sys_data_out;
/*
lcd_display U_lcd_display
(.clk (clk_vga),.rst_n (rst_n),.alpha_data (9'hC8),.lcd_xpos (lcd_xpos),.lcd_ypos (lcd_ypos),.lcd_data_in (sys_data_out), .lcd_data (lcd_data)
);
*/
//-----------------------------
//lcd driver top module
lcd_top u_lcd_top
(//global clock.clk (clk_vga), .rst_n (rst_n), //lcd interface.lcd_blank (lcd_blank),.lcd_sync (lcd_sync),.lcd_dclk (lcd_dclk),.lcd_hs (lcd_hs), .lcd_vs (lcd_vs), .lcd_en (), .lcd_rgb ({lcd_red, lcd_green ,lcd_blue}),//user interface.lcd_request (sys_rd),.lcd_framesync (lcd_framesync),.lcd_data (lcd_data),.lcd_xpos (lcd_xpos),.lcd_ypos (lcd_ypos)
);endmodule
五、什么是DVP?
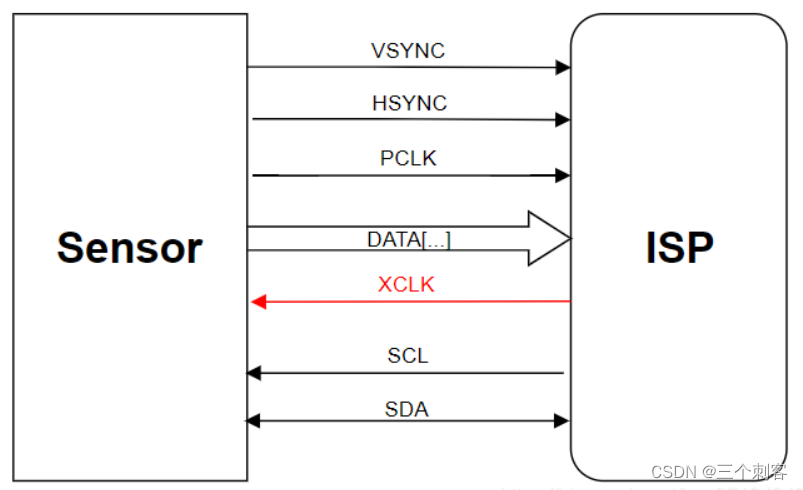
DVP(Digital Video Port) 是传统的sensor输出接口,采用并行输出方式,d数据位宽有8bit、10bit、12bit、16bit,是CMOS电平信号(重点是非差分信号),PCLK最大速率为96MHz,接口如下图:
DVP协议是摄像头中常用的协议,除了DVP协议摄像头中还有其他常用的协议如:MIPI、LVDS等协议,以实现标准图像数据流转换,其中摄像头8位数据转16位代码如下
module cmos_8_16bit(input rst,input pclk,input [7:0] pdata_i,input de_i,output reg[15:0] pdata_o,//转换成16位RGB565图像数据output reg hblank,output reg de_o
);
reg[7:0] pdata_i_d0;
reg[11:0] x_cnt;
always@(posedge pclk)
beginpdata_i_d0 <= pdata_i;
endalways@(posedge pclk or posedge rst)
beginif(rst)x_cnt <= 12'd0;else if(de_i)x_cnt <= x_cnt + 12'd1;elsex_cnt <= 12'd0;
endalways@(posedge pclk or posedge rst)
beginif(rst)de_o <= 1'b0;else if(de_i && x_cnt[0])de_o <= 1'b1;elsede_o <= 1'b0;
endalways@(posedge pclk or posedge rst)
beginif(rst)hblank <= 1'b0;elsehblank <= de_i;
endalways@(posedge pclk or posedge rst)
beginif(rst)pdata_o <= 16'd0;else if(de_i && x_cnt[0])pdata_o <= {pdata_i_d0,pdata_i};elsepdata_o <= 16'd0;
endendmodule 六、摄像头写数据请求
module cmos_write_req_gen(input rst,input pclk,input cmos_vsync,output reg write_req,output reg[1:0] write_addr_index,output reg[1:0] read_addr_index,input write_req_ack
);
reg cmos_vsync_d0;
reg cmos_vsync_d1;
always@(posedge pclk or posedge rst)
beginif(rst == 1'b1)begincmos_vsync_d0 <= 1'b0;cmos_vsync_d1 <= 1'b0;endelsebegincmos_vsync_d0 <= cmos_vsync;cmos_vsync_d1 <= cmos_vsync_d0;end
end
always@(posedge pclk or posedge rst)
beginif(rst == 1'b1)write_req <= 1'b0;else if(cmos_vsync_d0 == 1'b1 && cmos_vsync_d1 == 1'b0)write_req <= 1'b1;else if(write_req_ack == 1'b1)write_req <= 1'b0;
end
always@(posedge pclk or posedge rst)
beginif(rst == 1'b1)write_addr_index <= 2'b0;else if(cmos_vsync_d0 == 1'b1 && cmos_vsync_d1 == 1'b0)write_addr_index <= write_addr_index + 2'd1;
endalways@(posedge pclk or posedge rst)
beginif(rst == 1'b1)read_addr_index <= 2'b0;else if(cmos_vsync_d0 == 1'b1 && cmos_vsync_d1 == 1'b0)read_addr_index <= write_addr_index;
end
endmodule 七、顶层文件编写
`timescale 1ns / 1ps
module sdram_ov7670_vga
(//global clock 50MHz//input clk_27, //27MHzinput CLOCK, //input rst_n, //global reset//sdram controloutput S_CLK, //sdram clockoutput S_CKE, //sdram clock enableoutput S_NCS, //sdram chip selectoutput S_NWE, //sdram write enableoutput S_NCAS, //sdram column address strobeoutput S_NRAS, //sdram row address strobeoutput[1:0] S_DQM, //sdram data enable output [1:0] S_BA, //sdram bank addressoutput [12:0] S_A, //sdram addressinout [15:0] S_DB, //sdram data//VGA port output VGA_HSYNC, //horizontal sync output VGA_VSYNC, //vertical syncoutput [15:0] VGAD, //VGA data//cmos interfaceoutput CMOS_SCLK, //cmos i2c clockinout CMOS_SDAT, //cmos i2c datainput CMOS_VSYNC, //cmos vsyncinput CMOS_HREF, //cmos hsync refrenceinput CMOS_PCLK, //cmos pxiel clockoutput CMOS_XCLK, //cmos externl clockinput [7:0] CMOS_DB, //cmos data
// output cmos_rst_n, //cmos reset
// output cmos_pwdn, //cmos pwer downoutput [3:0] LED //led data input
);
assign rst_n = 1'b1;
//---------------------------------------------
wire clk_camera;
wire clk_vga; //vga clock
wire clk_ref; //sdram ctrl clock
wire clk_refout; //sdram clock output
wire sys_rst_n; //global reset
system_ctrl u_system_ctrl
(.clk (CLOCK), //global clock 50MHZ.rst_n (rst_n), //external reset.sys_rst_n (sys_rst_n), //global reset.clk_c0 (clk_camera), //13MHz.clk_c1 (clk_vga), //25MHz.clk_c2 (clk_ref), //100MHz.clk_c3 (clk_refout) //100MHz
);//-----------------------------
wire [7:0] I2C_RDATA; //i2c register data
wire [7:0] LUT_INDEX; //lut index
wire Config_Done; //I2C config done
I2C_AV_Config u_I2C_AV_Config
(//Global clock.iCLK (clk_vga), //25MHz.iRST_N (sys_rst_n), //Global Reset//I2C Side.I2C_SCLK (CMOS_SCLK), //I2C CLOCK.I2C_SDAT (CMOS_SDAT), //I2C DATA//CMOS Signal.Config_Done (Config_Done), //I2C Config done.I2C_RDATA (I2C_RDATA), //CMOS ID.LUT_INDEX ()//(LUT_INDEX) //ID Index
);
assign led_data = I2C_RDATA; //diaplay I2C_RDATA
//-----------------------------------------------
//Seg7_lut u5 ( LUT_INDEX[7:4], oSEG5 );
//Seg7_lut u4 ( LUT_INDEX[3:0], oSEG4 );
//Seg7_lut u1 ( I2C_RDATA[7:4], oSEG1 );
//Seg7_lut u0 ( I2C_RDATA[3:0], oSEG0 );//-----------------------------------------------
wire frame_valid; //data valid, or address restart
wire [7:0] cmos_fps_data; //cmos frame rate
CMOS_Capture u_CMOS_Capture
(//Global Clock.iCLK (clk_camera), //24MHz.iRST_N (sys_rst_n), //global reset//I2C Initilize Done.Init_Done (Config_Done & sdram_init_done), //Init Done//Sensor Interface.CMOS_RST_N (),//(cmos_rst_n), //cmos work state .CMOS_PWDN (),//(cmos_pwdn), //cmos power on .CMOS_XCLK (CMOS_XCLK), //cmos.CMOS_PCLK (CMOS_PCLK), //25MHz.CMOS_iDATA (CMOS_DB), //CMOS Data.CMOS_VSYNC (CMOS_VSYNC), //L: Vaild.CMOS_HREF (CMOS_HREF), //H: Vaild//Ouput Sensor Data .CMOS_oCLK (sys_we), //Data PCLK.CMOS_oDATA (sys_data_in), //16Bits RGB.CMOS_VALID (frame_valid), //Data Enable.CMOS_FPS_DATA ()//(cmos_fps_data) //cmos frame rate
);//Seg7_lut u7 ( cmos_fps_data[7:4], oSEG7 ); //fsp rate
//Seg7_lut u6 ( cmos_fps_data[3:0], oSEG6 ); //fps rate//wire [8:0] alpha_data; //alpha adjust data
//assign led_data = alpha_data; //diaplay alpha data
//alpha_control u_alpha_control
//(
// .clk (clk_vga), //vga clock
// .rst_n (sys_rst_n), //global reset
//
// .key_data (key_data), //key data
// .alpha_data (alpha_data) //aplha adjust data
//);//-------------------------------------
//sdram vga ctrl system
wire sys_we; //system data write enable
wire [15:0] sys_data_in; //system data input
wire sdram_init_done; //sdram init done
sdram_vga_top u_sdram_vga_top
(//global clock.clk_vga (clk_vga), //vga clock.clk_ref (clk_ref), //sdram ctrl clock.clk_refout (clk_refout), //sdram clock output.rst_n (sys_rst_n), //global reset//sdram control.sdram_clk (S_CLK), //sdram clock.sdram_cke (S_CKE), //sdram clock enable.sdram_cs_n (S_NCS), //sdram chip select.sdram_we_n (S_NWE), //sdram write enable.sdram_cas_n (S_NCAS), //sdram column address strobe.sdram_ras_n (S_NRAS), //sdram row address strobe.sdram_udqm (S_DQM[1]), //sdram data enable (H:8).sdram_ldqm (S_DQM[0]), //sdram data enable (L:8).sdram_ba (S_BA), //sdram bank address.sdram_addr (S_A), //sdram address.sdram_data (S_DB), //sdram data//lcd port.lcd_dclk (), //lcd pixel clock .lcd_hs (VGA_HSYNC), //lcd horizontal sync .lcd_vs (VGA_VSYNC), //lcd vertical sync.lcd_sync (),//(lcd_sync), //lcd sync.lcd_blank (), //lcd blank(L:blank).lcd_red (VGAD[15:11]), //lcd red data.lcd_green (VGAD[10:5]), //lcd green data.lcd_blue (VGAD[4:0]), //lcd blue data//user interface.clk_write (CMOS_PCLK), //fifo write clock.sys_we (sys_we), //fifo write enable.sys_data_in (sys_data_in), //fifo data input.sdram_init_done (sdram_init_done), //sdram init done.frame_valid (frame_valid) //frame valid
);endmodule
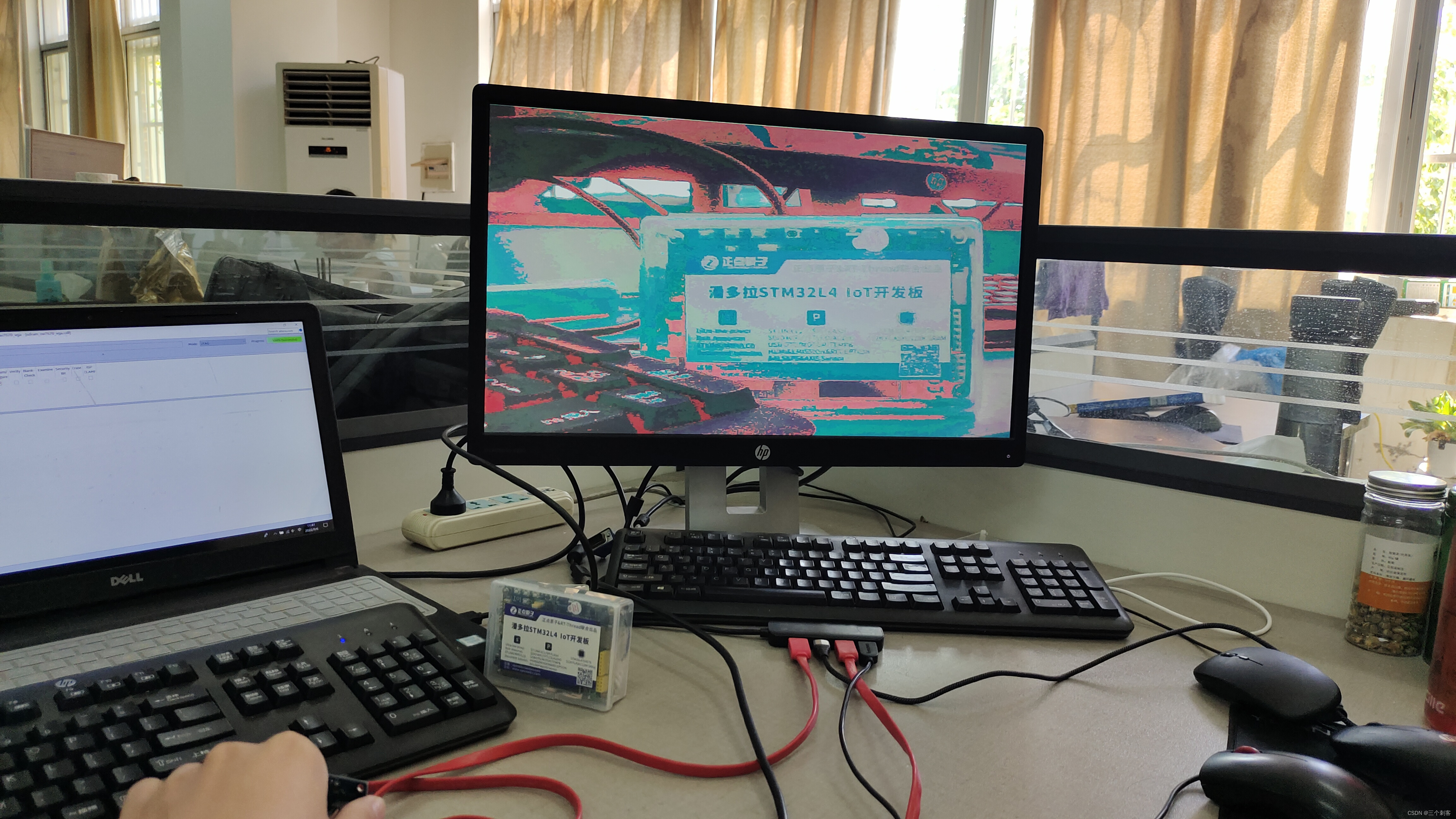
八、效果