Stochastic Image Denoising By Sampling from the Posterior Distribution (Paper reading)
Bahjat Kawar, Haifa(Israel), ICCV Workshop2021, Cited:22, Code:无, Paper.
目录子
- Stochastic Image Denoising By Sampling from the Posterior Distribution (Paper reading)
- 1. 前言
- 2. 整体思想
- 3. 方法
- 3.1 后验分布的分数函数和去噪算法
- 3.2 去噪实验
- 总结
1. 前言
对于严重的噪音水平,最小均方误差 (MMSE) 解决方案可能会导致模糊输出图像。本文提出了一种新颖的随机去噪方法,该方法可产生可行且高感知质量的结果,同时保持较小的 MSE。本文的方法采用 Langevin 动力学,它依赖于重复应用任何给定的 MMSE 降噪器,通过从后验分布采样获得重建图像。
2. 整体思想
整体思想是条件扩散模型,也就是在原始扩散模型上加入了梯度修正,其他和扩散模型一致。
3. 方法
从概率分布中生成样本的方法之一是利用Langevin热力学的Markov Chain Monte Carlo方法:
x t + 1 = x t + α ∇ x l o g p ( x t ) + 2 α z t (1) x_{t+1}=x_{t}+\alpha \nabla_{x}logp(x_{t})+\sqrt{2\alpha}z_{t} \tag{1} xt+1=xt+α∇xlogp(xt)+2αzt(1)
去噪任务可以表示为: y = x + n y=x+n y=x+n,其中 x ∼ p ( x ) x\sim p(x) x∼p(x),是干净图像, n ∼ N ( 0 , σ 0 2 I ) n\sim N(0,\sigma_{0}^{2}I) n∼N(0,σ02I)是已知噪声强度的加性高斯白噪声,去噪的目标是复原 x x x。虽然p(x)是未知的,但是从Solving Linear Inverse Problems Using The Prior Implicit in a Denoiser这篇文章中可以知道,我们能够从一个MMSE的去噪器中获得 p ( x ) p(x) p(x)。本文提出在给定噪声输入图像的情况下,通过从后验分布中采样来复原 x x x,即 p ( x ∣ y ) p(x|y) p(x∣y)。
本文基于退火Langevin动力学算法解决图像去噪问题。退火Langevin动力学算法通过分数函数 ∇ x l o g p ( x ~ ) \nabla_{x}logp(\tilde{x}) ∇xlogp(x~)从 p ( x ) p(x) p(x)中进行采样,对于不同大小的 σ \sigma σ,其中 x ~ = x + z , z ∼ N ( 0 , σ 2 I ) \tilde{x}=x+z,z\sim N(0,\sigma^{2}I) x~=x+z,z∼N(0,σ2I)。为了解决去噪问题,我们需要估计后验的分数函数 ∇ x ~ l o g p ( x ~ ∣ y ) \nabla_{\tilde{x}}logp(\tilde{x}|y) ∇x~logp(x~∣y)。
3.1 后验分布的分数函数和去噪算法
我们考虑噪声图像中的噪声是逐步添加上去的,即先固定一组噪声强度序列 { σ i } i = 0 L + 1 \left \{\sigma_{i} \right\}_{i=0}^{L+1} {σi}i=0L+1,如: σ 0 > σ 1 > . . . > σ L > σ L + 1 = 0 \sigma_{0}>\sigma_{1}>...>\sigma_{L}>\sigma_{L+1}=0 σ0>σ1>...>σL>σL+1=0,这里的 σ 0 \sigma_{0} σ0是 y y y的噪声强度:
x ~ L = x + z L x ~ L − 1 = x ~ L + z L − 1 x ~ L − 2 = x ~ L − 1 + z L − 2 ⋮ x ~ 1 = x ~ 2 + z 1 y = x ~ 0 = x ~ 1 + z 0 (2) \begin{aligned} \tilde{x}_{L}&=x+z_{L}\\ \tilde{x}_{L-1}&=\tilde{x}_{L}+z_{L-1}\\ \tilde{x}_{L-2}&=\tilde{x}_{L-1}+z_{L-2}\\ \vdots\\ \tag{2} \tilde{x}_{1}&=\tilde{x}_{2}+z_{1}\\ y=\tilde{x}_{0}&=\tilde{x}_{1}+z_{0} \end{aligned} x~Lx~L−1x~L−2⋮x~1y=x~0=x+zL=x~L+zL−1=x~L−1+zL−2=x~2+z1=x~1+z0(2)
其中, z i ∼ N ( 0 , ( σ i 2 − σ i + 1 2 ) I ) z_{i}\sim N(0, (\sigma_{i}^{2}-\sigma_{i+1}^{2})I) zi∼N(0,(σi2−σi+12)I),从上述过程可以得到:
y = x ~ 0 = x + ∑ i = 0 L z i (3) y=\tilde{x}_{0}=x+\sum_{i=0}^{L}z_{i} \tag{3} y=x~0=x+i=0∑Lzi(3)
其中, ∑ i = 0 L z i ∼ N ( 0 , σ 0 2 I ) \sum_{i=0}^{L}z_{i}\sim N(0, \sigma_{0}^{2}I) ∑i=0Lzi∼N(0,σ02I),注意到 y − x ~ i = ∑ j = 0 i − 1 z j y-\tilde{x}_{i}=\sum_{j=0}^{i-1}z_{j} y−x~i=∑j=0i−1zj,则 ∑ j = 0 i − 1 z j ∼ N ( 0 , ( σ 0 2 − σ i 2 ) I ) \sum_{j=0}^{i-1}z_{j}\sim N(0,(\sigma_{0}^{2}-\sigma_{i}^{2})I) ∑j=0i−1zj∼N(0,(σ02−σi2)I),可以理解为在噪声图上减去当前 t t t时刻状态后的剩余噪声量。后面对于任意 i i i时刻的 x i x_{i} xi用 x ~ \tilde{x} x~来简化表示。接下来求 ∇ x ~ l o g p ( x ~ ∣ y ) \nabla_{\tilde{x}}logp(\tilde{x}|y) ∇x~logp(x~∣y):
∇ x ~ l o g p ( x ~ ∣ y ) = ∇ x ~ l o g p ( y ∣ x ~ ) p ( x ~ ) 1 p ( y ) = ∇ x ~ [ l o g p ( y ∣ x ~ ) + l o g p ( x ~ ) + l o g 1 p ( y ) ] \nabla_{\tilde{x}}logp(\tilde{x}|y)=\nabla_{\tilde{x}}logp(y|\tilde{x})p(\tilde{x})\frac{1}{p(y)}=\nabla_{\tilde{x}}\left [logp(y|\tilde{x})+logp(\tilde{x})+log\frac{1}{p(y)}\right] ∇x~logp(x~∣y)=∇x~logp(y∣x~)p(x~)p(y)1=∇x~[logp(y∣x~)+logp(x~)+logp(y)1]
y y y是一个不依赖于 x ~ \tilde{x} x~的固定观测,最后一项的梯度为0,则
∇ x ~ l o g p ( x ~ ∣ y ) = ∇ x ~ l o g p ( y ∣ x ~ ) + ∇ x ~ l o g p ( x ~ ) (4) \nabla_{\tilde{x}}logp(\tilde{x}|y)=\nabla_{\tilde{x}}logp(y|\tilde{x})+\nabla_{\tilde{x}}logp(\tilde{x}) \tag{4} ∇x~logp(x~∣y)=∇x~logp(y∣x~)+∇x~logp(x~)(4)
其中,第一项中, p ( y ∣ x ~ ) = g ( y − x ~ ) p(y|\tilde{x})=g(y-\tilde{x}) p(y∣x~)=g(y−x~),则:
∇ x ~ l o g p ( y ∣ x ~ ) = ∇ x ~ l o g [ 1 2 π ( σ 0 2 − σ i 2 ) e x p [ − 1 2 ∣ ∣ y − x ~ ∣ ∣ 2 ( σ 0 2 − σ i 2 ) ] ] = y − x ~ σ 0 2 − σ i 2 \nabla_{\tilde{x}}logp(y|\tilde{x})=\nabla_{\tilde{x}}log\left [\frac{1}{\sqrt{2\pi(\sigma_{0}^{2}-\sigma_{i}^{2})}}exp\left[-\frac{1}{2}\frac{||y-\tilde{x}||^{2}}{(\sigma_{0}^{2}-\sigma_{i}^{2})}\right] \right]=\frac{y-\tilde{x}}{\sigma_{0}^{2}-\sigma_{i}^{2}} ∇x~logp(y∣x~)=∇x~log[2π(σ02−σi2)1exp[−21(σ02−σi2)∣∣y−x~∣∣2]]=σ02−σi2y−x~
因此:
∇ x ~ l o g p ( x ~ ∣ y ) = ∇ x ~ l o g p ( x ~ ) + y − x ~ σ 0 2 − σ i 2 (5) \nabla_{\tilde{x}}logp(\tilde{x}|y)=\nabla_{\tilde{x}}logp(\tilde{x})+\frac{y-\tilde{x}}{\sigma_{0}^{2}-\sigma_{i}^{2}} \tag{5} ∇x~logp(x~∣y)=∇x~logp(x~)+σ02−σi2y−x~(5)
这篇文章中Solving Linear Inverse Problems Using The Prior Implicit in a Denoiser,我们知道分数函数和MMSE去噪器的联系,既训练一个网络来估计分数函数可以解释为去噪器估计MMSE:
∇ x ~ l o g p ( x ~ ) = x ^ ( x ~ ) − x ~ σ i 2 \nabla_{\tilde{x}}logp(\tilde{x})= \frac{\hat{x}(\tilde{x})-\tilde{x}}{\sigma_{i}^{2}} ∇x~logp(x~)=σi2x^(x~)−x~
其中 x ^ ( x ~ ) = E ( x ∣ x ~ ) \hat{x}(\tilde{x})=\mathbb{E}(x|\tilde{x}) x^(x~)=E(x∣x~)是一个MMSE去噪器。随机去噪算法如下:
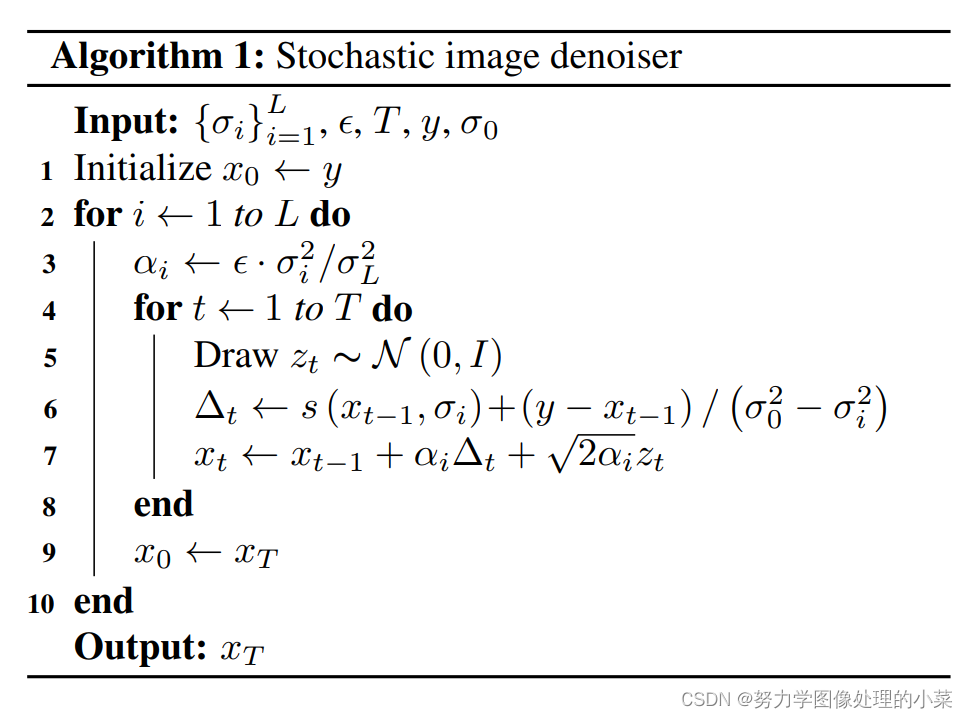
3.2 去噪实验
去噪网络选择 noise conditional score network version 2 (NCSNv2)。针对网络的训练,本文特意强调,是像图像合成(image synthesis)任务一样选择同一类别的数据集(CelebA, FFHQ, LSUN)对网络进行训练而不是自然图像集。超参数的设定保持和Improved techniques for training score-based generative models该文章一致。实验结果如下:
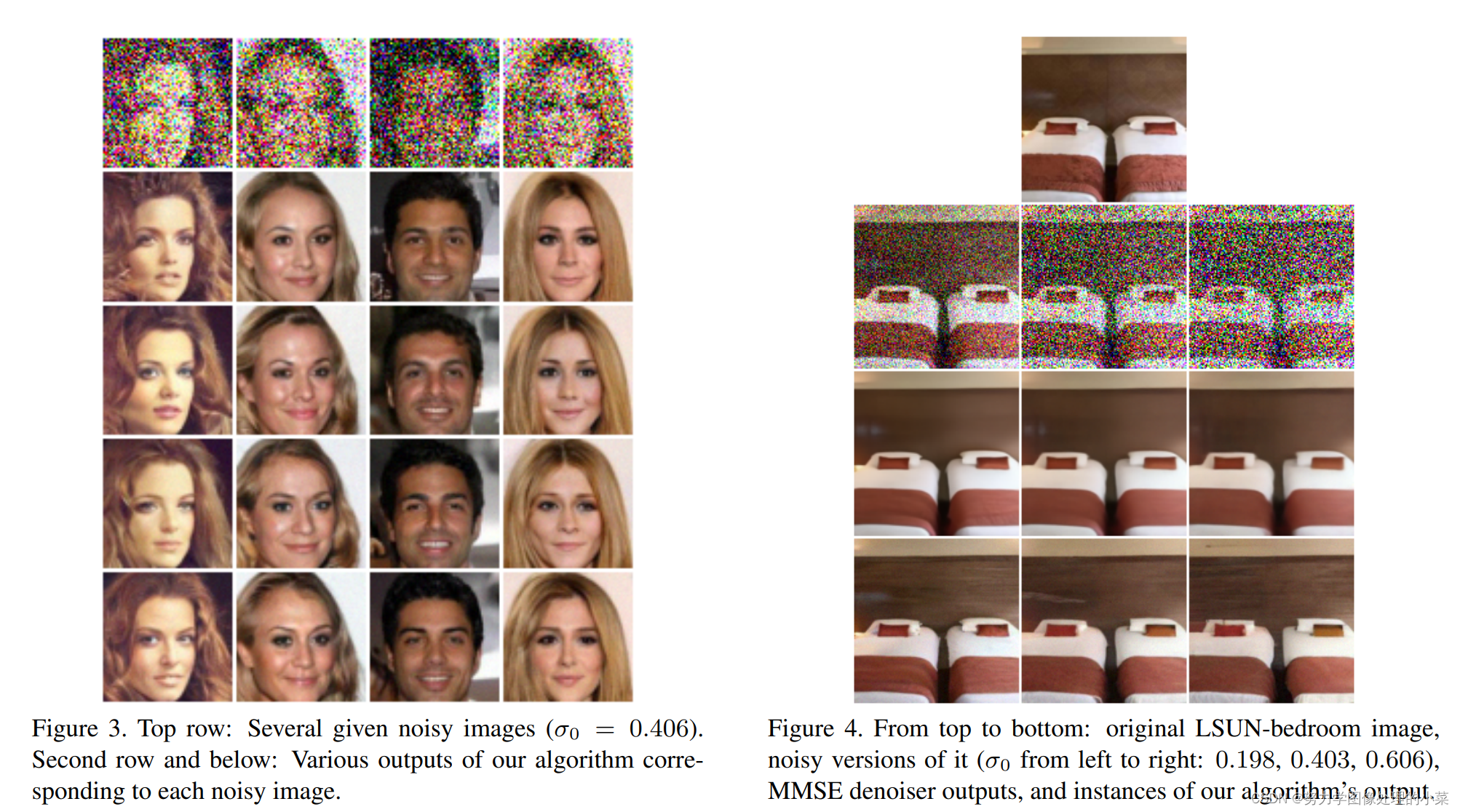
虽然说,相对于MMSE去噪器,生成去噪算法更真实,更具细节,但是相对于MMSE的去噪平均来说,生成算法具有不同的解,如左边的图3,会有机会不同的4张脸,这对于某些特殊的任务来说是不友好的。
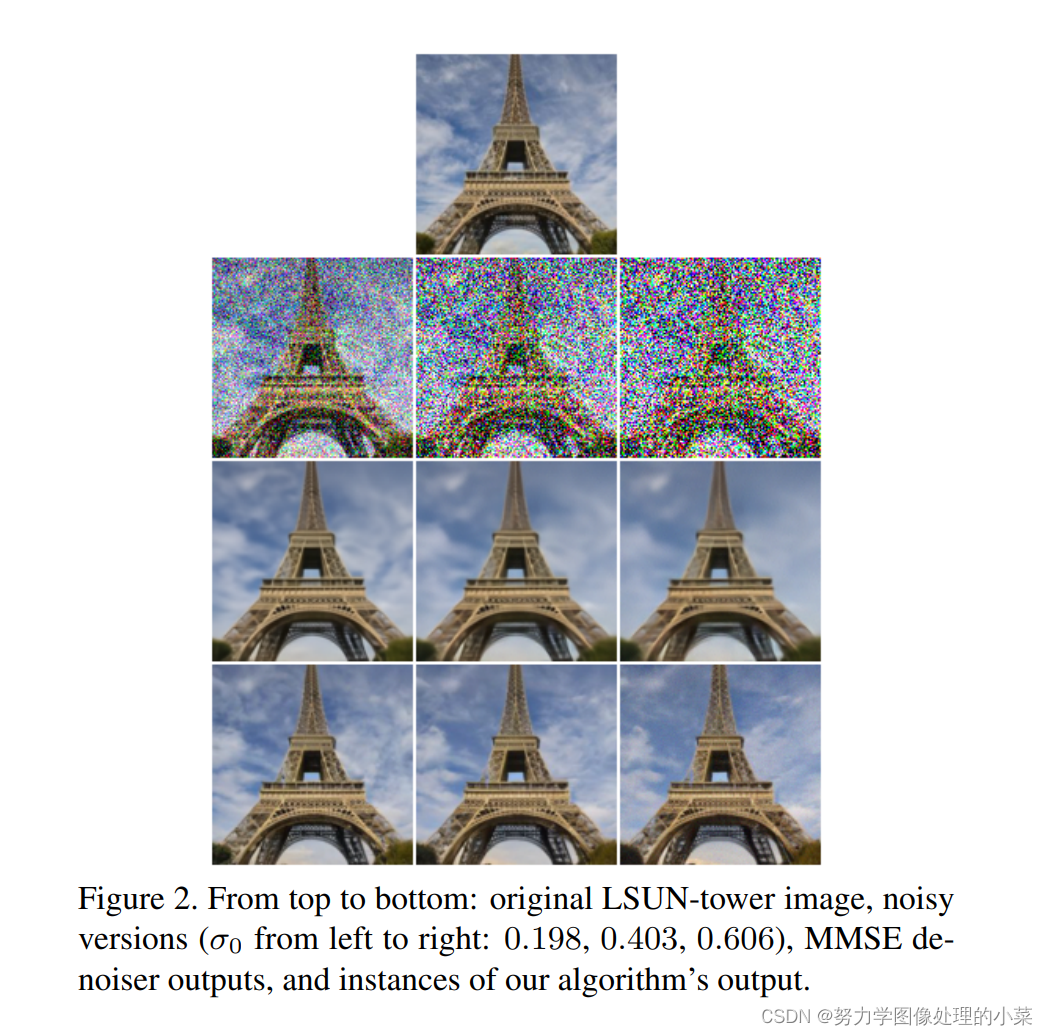
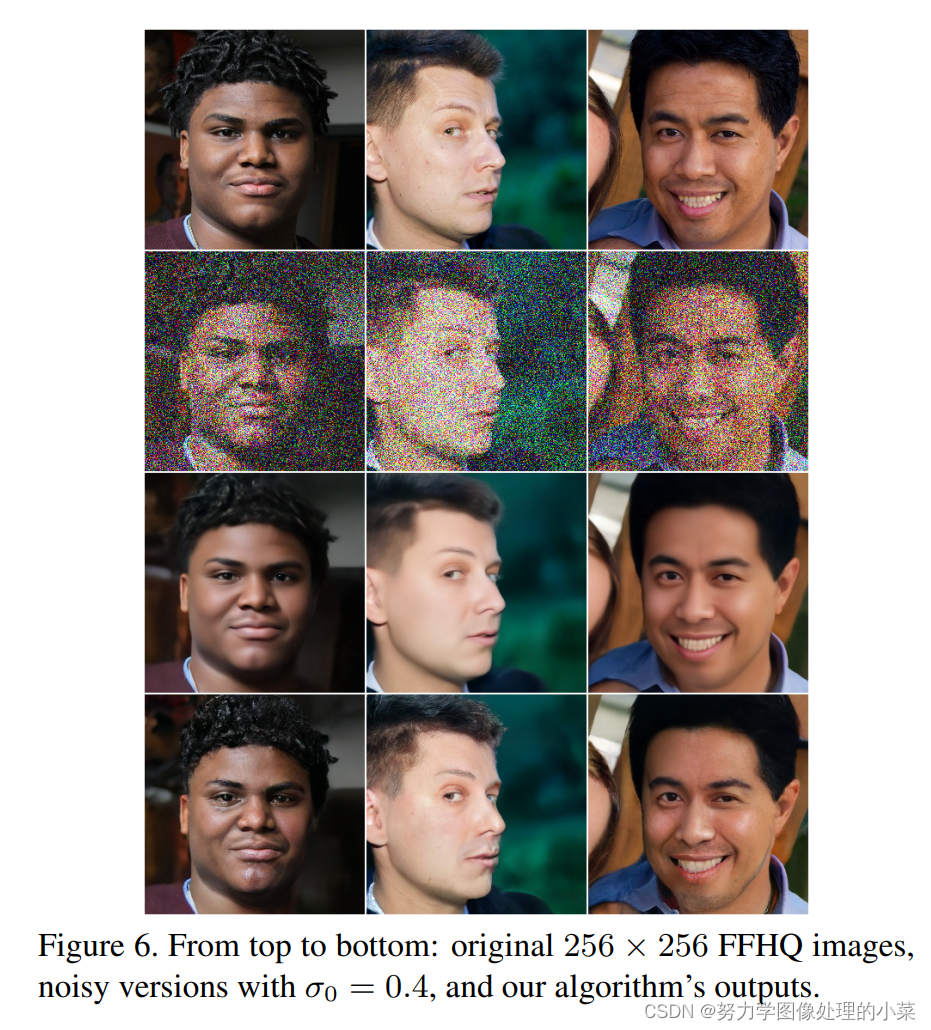
从这里我们就能看到生成去噪器的优势了,图像更自然。
总结
这里假设了噪声强度 σ 0 \sigma_{0} σ0,也就是知道了噪声强度这个强先验,在模拟噪声数据集上的表现良好,但是该算法还无法处理真实噪声,或者盲噪声,这是扩散模型应用low-level的一个重要目标。