OTSU算法原理及实现:
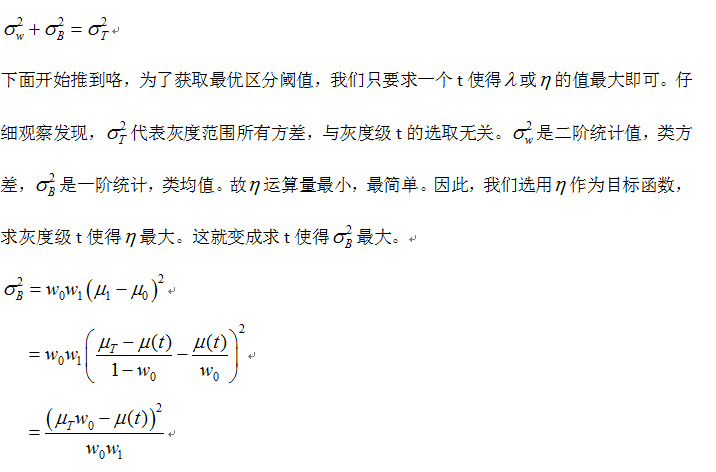
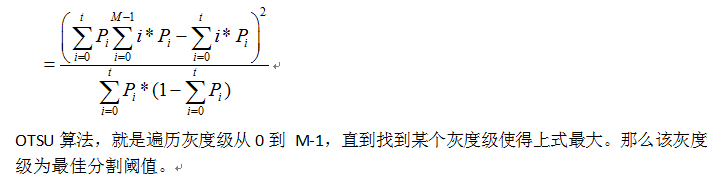
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种自适应的阈值确定方法。算法假设图像像素能够根据阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大【用方差表达,具体公式见后】。OTSU的扩展算法,可进行多级阈值处理,称为“Multi Otsu method”【题外话】
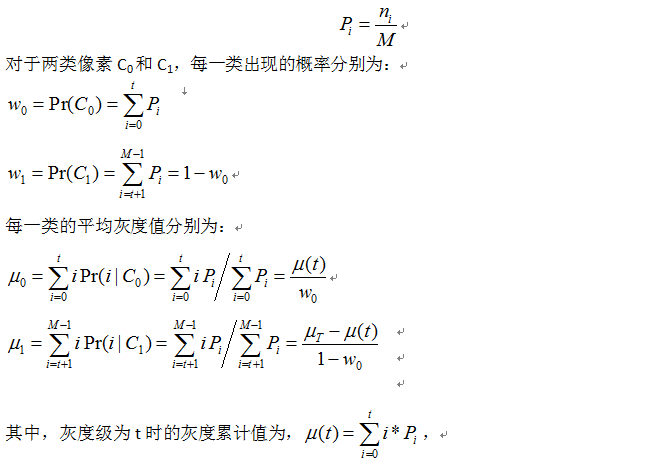
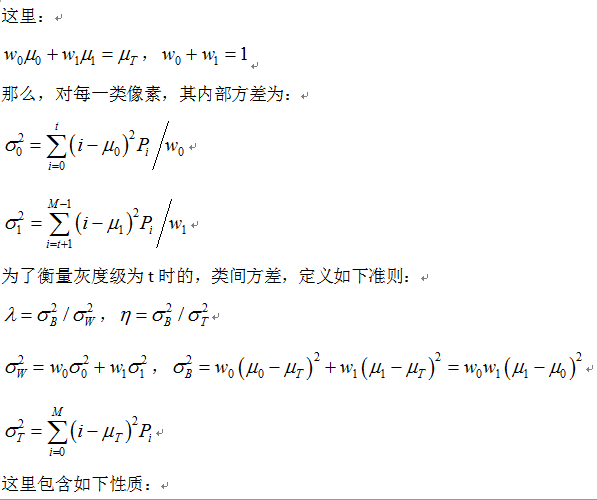
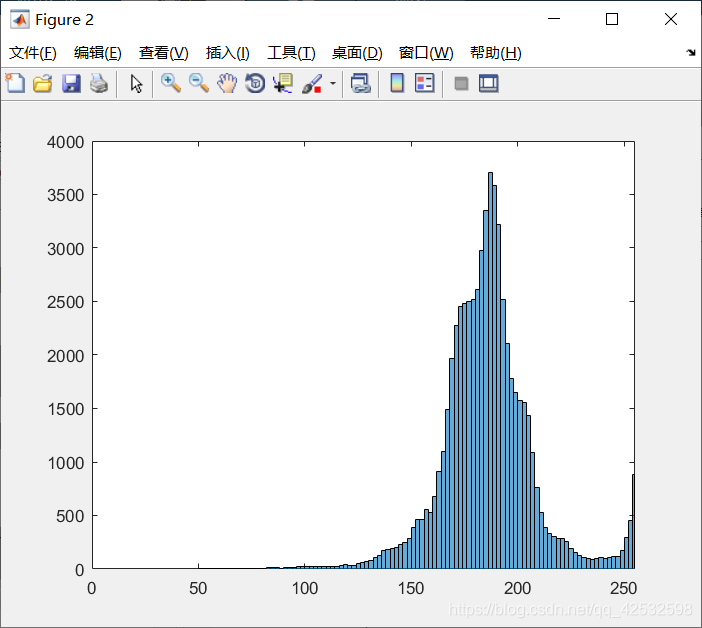
设原始灰度级为M,灰度级为i的像素点个数为ni,对灰度直方图进行归一化:

opencv实现代码:
int CLxrImage::Otsu(IplImage* src)
{ int height=src->height; int width=src->width; //统计直方图 int nHistogram[256] = {0};float fHistogram[256] = {0}; for(int i=0; i < height; i++){ for(int j = 0; j < width; j++) { nHistogram[(unsigned char)src->imageData[i*src->widthStep+j]]++; } }//归一化直方图 int size = height * width; for(int i = 0; i < 256; i++){ fHistogram[i] = nHistogram[i] / (float)size; } //average pixel value float avgValue=0; for(int i=0; i < 256; i++){ avgValue += i * fHistogram[i]; //整幅图像的平均灰度} int threshold; float maxVariance=0; float w = 0, u = 0; for(int i = 0; i < 256; i++) { w += fHistogram[i]; //假设当前灰度i为阈值, 0~i 灰度的像素(假设像素值在此范围的像素叫做前景像素) 所占整幅图像的比例u += i * fHistogram[i]; // 灰度i 之前的像素(0~i)的平均灰度值: 前景像素的平均灰度值float t = avgValue * w - u; float variance = t * t / (w * (1 - w) ); if(variance > maxVariance) { maxVariance = variance; threshold = i; } } return threshold;
}
int CLxrImage::Otsu2(IplImage* src)
{int i,j,nThresh;int nHistogram[256] = {0};double fStdHistogram[256] = {0.0};double fGrayAccu[256] = {0.0};double fGrayAve[256] = {0.0};double fAverage = 0;double fTemp = 0;double fMax = 0;//统计直方图for(i = 0; i <src->height; i++){for(j = 0; j <src->width; j++){nHistogram[(unsigned char)src->imageData[i*src->width+j]] ++;}}//归一化直方图for(i = 0; i <= 255;i++){fStdHistogram[i] = nHistogram[i]/(double)(src->width * src->height);}for(i=0;i<=255;i++){for(j=0;j<=i;j++){fGrayAccu[i] += fStdHistogram[j];//所有灰度级,关于w0的数组 fGrayAve[i] += j*fStdHistogram[j];//所有灰度级,关于u(t)的数组}fAverage += i*fStdHistogram[i]; }//计算OSTUfor(i=0;i<=255;i++){fTemp=(fAverage*fGrayAccu[i]-fGrayAve[i])*(fAverage*fGrayAccu[i]-fGrayAve[i])/(fGrayAccu[i]*(1-fGrayAccu[i]));if(fTemp>fMax){fMax=fTemp;nThresh=i;}}return nThresh;
}
![[图像处理]14.分割算法比较 OTSU算法+自适应阈值算法+分水岭](https://img-blog.csdnimg.cn/c02140900dfe4b1f93edc608877901a4.jpeg)