param参数服务器
声明:本文主要内容来自: MOOC 机器人操作系统入门.仅仅是为了查阅方便,做了个小结,侵权必删!
Table of Contents
零.param介绍
0.0 param有什么用
0.1参数类型
二.如何使用----三种维护方式
2.1命令行维护
2.2.launch文件
2.2.1 yaml文件
2.3node源码
三.命名空间对param的影响
零.param介绍
0.0 param有什么用
机器人工作时,我们有需要对机器人的参数(如传感器参数、算法的参数)进行设置。有些参数(如机器人的轮廓、传感器的高度)在机器人启动时就设定好就行了;有些参数则需要动态改变(特别是在调试的时候)。ROS提供了参数服务器来满足这一需求。我们可以将参数设置在参数服务器,在需要用到参数的时候再从参数服务器中获取。[1]
0.1参数类型
ROS参数服务器为参数值使用XMLRPC数据类型, 其中包括:strings, integers, floats,booleans, lists, dictionaries, iso8601 dates, and base64-encoded data
二.如何使用----三种维护方式
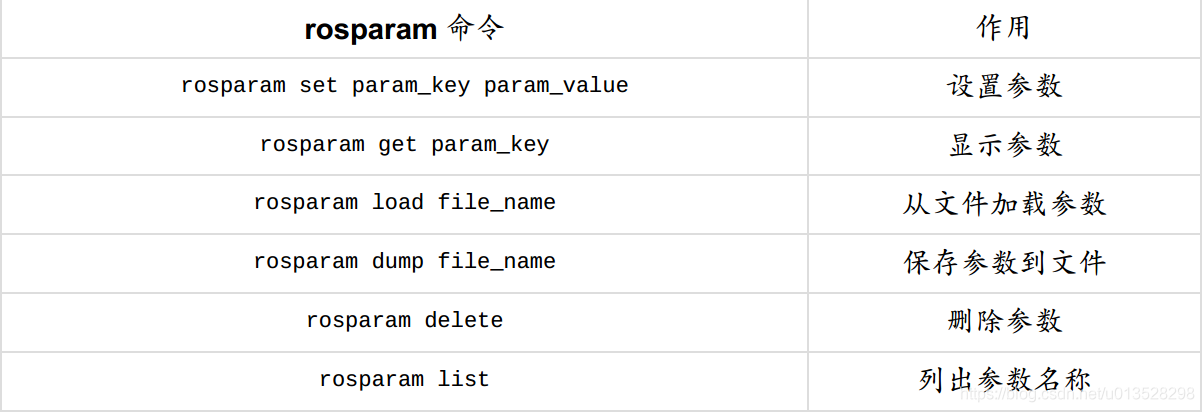
2.1命令行维护
2.2.launch文件
parameter是ROS系统中运行的参数,存储在参数服务器当中.在launch文件当中通过<param>元素加载parameter;launch文件执行后,parameter就加载到ROS的参数服务器上了.
launch文件中有很多标签, 而与参数服务器相关的标签只有两个, 一个是 <param> , 另一个是 <rosparam> 。rosparam可操作多个参数,以及yaml文件参数,param一次性只能指定一个参数,且是标准类型的参数。
- <param>标签可用于直接设置参数,也可以从文件中读取
- <rosparam>标签用于从yaml文件中读取并设置参数,也可以设置多个参数
- roslaunch发现<param>和<rosparam>标签后会调用rosparam包来实现设置
<launch><!--param参数配置--><param name="param1" value="1" /><param name="param2" value="2" /><!--param name="table_description" command="$(find xacro)/xacro.py $(find gazebo_worlds)/objects/table.urdf.xacro" /--><!--rosparam参数配置 一次设置多个参数--><rosparam> param3: 3param4: 4param5: 5</rosparam><!--以上写法将参数转成YAML文件加载,注意param前面必须为空格,不能用Tab,否则YAML解析错误--><!--rosparam file="$(find robot_sim_demo)/config/xbot-u_control.yaml" command="load" /--><node pkg="param_demo" type="param_demo" name="param_demo" output="screen" /></launch>
2.2.1 yaml文件
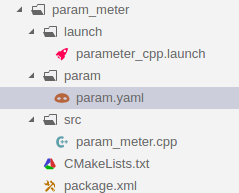
这个例子在自己创建的功能包param_meter下.
- 如下图所示在功能包下创建新的文件夹param,再在这个文件夹下创建 yaml文件param.yaml.
- 编写yaml文件
parammeter_test:param3: 56param4: 58param5: 96
- 在launch文件中进行修改
加入
<rosparam file="$(find param_meter)/param/param.yaml" command="load" />变成
<launch><!--param参数配置--><param name="param1" value="1" /><param name="param2" value="2" /><!--param name="table_description" command="$(find xacro)/xacro.py $(find gazebo_worlds)/objects/table.urdf.xacro" /--><!--rosparam参数配置--><rosparam> param3: 3param4: 12param5: 9</rosparam><!--以上写法将参数转成YAML文件加载,注意param前面必须为空格,不能用Tab,否则YAML解析错误--><rosparam file="$(find param_meter)/param/param.yaml" command="load" /><!--rosparam file="$(find robot_sim_demo)/config/xbot-u_control.yaml" command="load" /--><node pkg="param_meter" type="param_meter" name="param_meter" output="screen" /></launch>
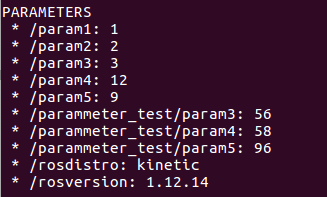
- 运行launch文件
得到了运行结果,param的值和自己设置的相同.
2.3node源码
关于param的API, roscpp为我们提供了两套, 一套是放在 ros::param namespace下, 另一套是在 ros::NodeHandle 下, 这
两套API的操作完全一样, 用哪一个取决于你的习惯。
- ros::param namespace
- ros::NodeHandle
和param相关的操作如下:
- get param
- set param
- check param
- delete param
#include<ros/ros.h>int main(int argc, char **argv){ros::init(argc, argv, "param_demo");ros::NodeHandle nh;int parameter1, parameter2, parameter3, parameter4, parameter5;//Get Param的三种方法//① ros::param::get()获取参数“param1”的value,写入到parameter1上bool ifget1 = ros::param::get("param1", parameter1);//② ros::NodeHandle::getParam()获取参数,与①作用相同bool ifget2 = nh.getParam("param2",parameter2);//③ ros::NodeHandle::param()类似于①和②//但如果get不到指定的param,它可以给param指定一个默认值(如33333)nh.param("param3", parameter3, 33333);if(ifget1)ROS_INFO("Get param1 = %d", parameter1);elseROS_WARN("Didn't retrieve param1");if(ifget2)ROS_INFO("Get param2 = %d", parameter2);elseROS_WARN("Didn't retrieve param2");if(nh.hasParam("param3"))ROS_INFO("Get param3 = %d", parameter3);elseROS_WARN("Didn't retrieve param3");//Set Param的两种方法//① ros::param::set()设置参数parameter4 = 4;ros::param::set("param4", parameter4);//② ros::NodeHandle::setParam()设置参数parameter5 = 5;nh.setParam("param5",parameter5);ROS_INFO("Param4 is set to be %d", parameter4);ROS_INFO("Param5 is set to be %d", parameter5);//Check Param的两种方法//① ros::NodeHandle::hasParam()bool ifparam5 = nh.hasParam("param5");//② ros::param::has()bool ifparam6 = ros::param::has("param6");if(ifparam5) ROS_INFO("Param5 exists");elseROS_INFO("Param5 doesn't exist");if(ifparam6) ROS_INFO("Param6 exists");elseROS_INFO("Param6 doesn't exist");//Delete Param的两种方法//① ros::NodeHandle::deleteParam()bool ifdeleted5 = nh.deleteParam("param5");//② ros::param::del()bool ifdeleted6 = ros::param::del("param6");}
三.命名空间对param的影响
在实际的项目中, 实例化句柄时, 经常会看到两种不同的写法 ros::NodeHandle n; ros::NodeHandle nh("~");` 这两种写法有什么不同呢? launch文件夹的demo.launch定义两个参数, 一个全局serial 他的数值是5,一个是局部的serial, 他的数值是10.在launch 标签内的是全局参数值, node 标签内的是局部参数其有效域是当前节点。[2]
<launch><!--全局参数serial--><param name="serial" value="5" /><node name="name_demo" pkg="name_demo" type="name_demo"output="screen"><!--局部参数serial--><param name="serial" value="10" /></node>
</launch>
在name_demo.cpp中, 我们分别尝试了, 利用全局命名空间句柄提取全局的param和局部的param, 以及在局部命名空间下的句柄提取全局的param和局部的param, 详细的代码如下 :
#include <ros/ros.h>int main(int argc, char* argv[])
{int serial_number = -1;//serial_number初始化ros::init(argc, argv, "name_demo");//node初始化/*创建命名空间*///n 是全局命名空间ros::NodeHandle n;//nh 是局部命名空间ros::NodeHandle nh("~");/*全局命名空间下的Param*/ROS_INFO("global namespace");//提取全局命名空间下的参数serialn.getParam("serial", serial_number);ROS_INFO("global_Serial was %d", serial_number);//提取局部命名空间下的参数serialn.getParam("name_demo/serial", serial_number);//在全局命名空间下,要提取局部命名空间下的参数,需要添加node nameROS_INFO("global_to_local_Serial was %d", serial_number);/*局部命名空间下的Param*/ROS_INFO("local namespace");//提取局部命名空间下的参数serialnh.getParam("serial", serial_number);ROS_INFO("local_Serial was %d", serial_number);//提取全局命名空间下的参数serialnh.getParam("/serial", serial_number);//在局部命名空间下,要提取全局命名空间下的参数,需要添加“/”ROS_INFO("local_to_global_Serial was %d", serial_number);ros::spin();return 0;
}