1. 引言
近年来,随着人工智能的发展,文本检测在很多任务中都是一项基本任务,比如广告牌中文字识别、智能驾驶路牌的检测、身份证识别、快递地址识别等。这些任务中首先的一项就是文本检测,即检测出文本在图像中的位置,这样才能便于后续的文本识别。
文本检测的任务类似目标检测,但是又要比目标检测难,因为目标检测只需对物体进行分类,当只看到物体的半个区域时,其实就基本可以识别出物体是什么类别,但是对于文本检测来说,当只看到局部区域时,可能只是看到一个单词中的个别字母或者一个汉字中的偏旁部首,因此,很难识别出对应的文本是什么,因此,对于文本检测来说,它的精度要求比目标检测要高得多。
文本检测目前主要分为两种,一种是OCR(Optical Character Recognition, 光学字符识别),一种是STR(Scene Text Recognition,场景文本识别),前者主要是用于对一些扫描文档的文本检测,要求背景必须比较干净,并且识别的精度比较低,速度也比较慢,而后者则是对一些自然场景的文本检测,其难度更大,一方面是背景信息及其复杂,另一方面是文字的角度、字体、颜色等千变万化,因此,面临的挑战也更大。
这几年来,随着卷积神经网络的发展,场景文本识别得到了很大的发展,其中,最经典是16年Zhi Tian等人提出来的CTPN(Connectionist Text Proposal Network)模型,该模型极大的简化了检测的流程,也使文本检测的效果、速度、稳健性得到了质的提升。因此,本文将对这个模型进行介绍,并用tensorflow进行实现。
2. CTPN模型介绍
2.1 CTPN的模型结构
CTPN模型主要包括三个部分,分别是卷积层、Bi-LSTM层、全连接层,其结构如下图所示。
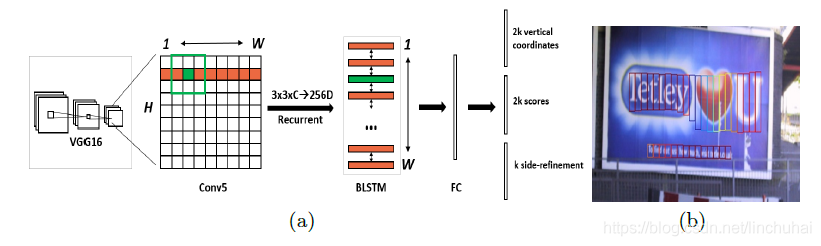
首先,在卷积层部分,CTPN选取的是16年比较火的VGG16模型进行特征提取,作者选择了VGG16模型中conv5的feature maps作为图像最后的特征,假设此时feature maps的尺寸为;
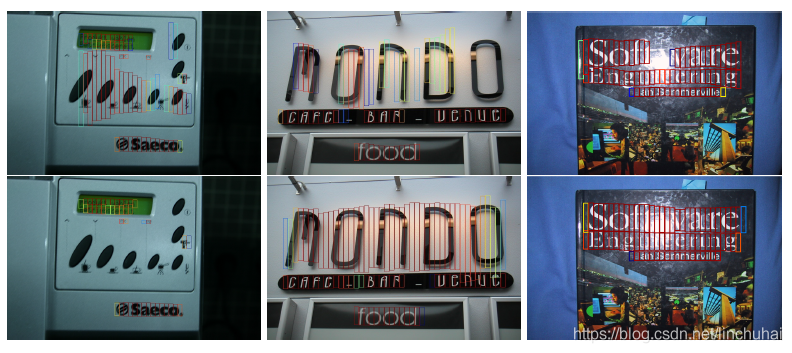
接着,由于文本之间存在序列关系,因此,作者引入了递归神经网络,采用的是一层Bi-LSTM层,作者发现引入了递归神经网络对文本检测的效果有一个很大的提升,如下图所示,第一行是不采用递归神经网络的效果,第二行是采用了Bi-LSTM后的效果。具体的做法是采用一个的滑动窗口,提取feature maps上每个点周围
的区域作为该点的特征向量表示,此时,图像的尺度变为
,然后将每一行作为序列的长度,高度作为batch_size,传入一个128维的Bi-LSTM,得到Bi-LSTM层的输出为
;
最后,将Bi-LSTM的输出接入全连接层,在这一部分,作者引入了anchor的机制,即对每一个点用k个anchor进行预测,每个anchor就是一个盒子,其高度由[273,390,...,11]逐渐递减,每次除以0.7,总共有10个。作者采用的是三个全连接层分支。
第一个分支是对k个auchor的纵坐标,每一个anchor的纵坐标有两个,分别是盒子的y坐标中心和高度,因此,总共的维度是2k。具体表示如下:
其中,、
分别是预测的坐标和真实的坐标,
和
分别是一个anchor的y坐标中心和高度,
和
分别是预测出来的y坐标中心和高度,
和
分别是真实的y坐标中心和高度。
第二个分支是对k个anchor的score进行预测,即该盒子是否包含文本的概率,每个盒子对应一个二分类,因此,总共是2k个维度。当score>0.7时,认为该auchor包含文本。
第三个分支是对k个anchor的横坐标进行预测,可以在每个anchor盒子的左侧或右侧的横坐标,因此,k个盒子对应的维度就是k。之所以需要这个分支主要是为了修正anchor的水平位置。坐标的具体表示如下:
其中,是预测出来的距离anchor水平坐标(左或右坐标)最近的坐标,
是真实的x坐标,
是anchor的x坐标中心,
是anchor的宽度,也就是16。
2.2 side-refinement
当模型预测完成后,由于是对feature-map上每个点进行预测,因此,其预测出来只是对应一个anchor,其形式就如上图所示,因此,还需要将这些anchor进行连接,将其连接成一个完整的文本线。因此,作者又引入了一个叫做side-refinement的算法,用于文本线构造,其思想大致如下:
首先,对于第i个text proposal,记为,寻找其配对的邻居
,记配对后关系为
,其中,要求
满足以下条件:
-
距离
的长度在50个像素点以内,并且其score最大
-
接着,对进行反向寻找近邻,当其近邻也刚好是
时,则
和
的文本线构建成功。
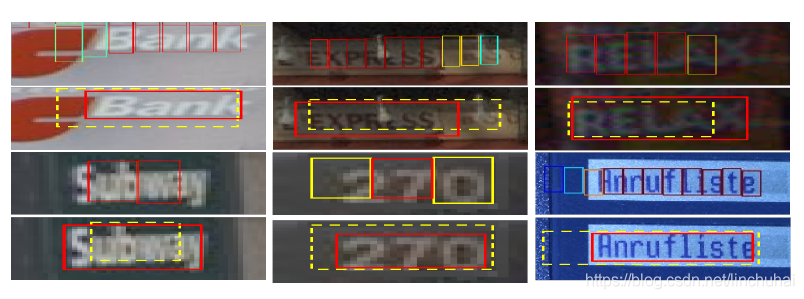
下图是用了refinement和不用refinement的对比,红色线是用了refinement的效果,黄色线是不用refinement的效果。
2.3 模型的损失函数
由于全连接层对应的是三个分支,因此,其损失也对应着有三个,作者将这三个损失进行了加权,其形式如下:
其中,分别为score、坐标、side-refinement对应的损失函数,其中,
采用的是softmax loss,
采用的是regression loss。
分别是预测的score和真实的score,
分别对应预测的垂直方向坐标和真实的垂直方向坐标,
分别对应预测的side-refinement和真实的side-refinement,
分别对应anchor的个数,这里anchor的个数是不一样的,
考虑的是score>0.7的anchor,
考虑的是
或者与真实anchor的重合度大于0.5的anchor,
考虑的是分布在距离真实文本线左右两侧32个像素范围内的anchor。
分别对应着
惩罚参数,采用经验值1和2。
3. CTPN的tensorflow实现
本文利用tensorflow对CTPN进行了复现,参考的代码主要是LI Mingfan的,其原始链接如下:
- 参考代码链接:https://github.com/Li-Ming-Fan/OCR-DETECTION-CTPN。
本文将其代码进行了规整,并做了一些改动,并将模型迁移到ICDAR的比赛数据集上进行训练,该数据集总共有7200张,里面含有英语、韩语、日语、中文等多国语言,本文在训练时主要是对英语和中文进行检测。ICDAR数据集的下载链接如下:
- ICDAR数据集链接:http://rrc.cvc.uab.es/?ch=8&com=downloads
在模型的结构部分,主要改动的是卷积层部分,引入了ResNet的结构,并且横坐标也采用的是2k的维度,另外,损失函数用到是平方损失函数,并且引入了focal-loss的思想。由于篇幅的原因,这里不对模型的结构代码进行具体解读,里面已经备注的比较详细,具体代码如下:
# -*- coding: utf-8 -*-
import os
import random
import time
import numpy as np
import tensorflow as tf
from PIL import Image
from tensorflow.python.framework import graph_util
from tensorflow.python.training.moving_averages import assign_moving_average
import data_loaderclass ModelDetect:def __init__(self,model_detect_dir,model_detect_pb_file,LEARNING_RATE_BASE,TRAINING_STEPS,VALID_FREQ,LOSS_FREQ,KEEP_NEAR,KEEP_FREQ,anchor_heights,MOMENTUM,dir_results_valid,threshold,model_detect_name,rnn_size,fc_size,keep_prob):self.model_detect_dir = model_detect_dirself.model_detect_pb_file = model_detect_pb_fileself.pb_file = os.path.join(model_detect_dir, model_detect_pb_file)self.sess_config = tf.ConfigProto()self.is_train = Falseself.graph = Noneself.sess = Noneself.learning_rate_base = LEARNING_RATE_BASEself.train_steps = TRAINING_STEPSself.valid_freq = VALID_FREQself.loss_freq = LOSS_FREQself.keep_near = KEEP_NEARself.keep_freq = KEEP_FREQself.anchor_heights = anchor_heightsself.MOMENTUM = MOMENTUMself.dir_results_valid = dir_results_validself.threshold = thresholdself.model_detect_name = model_detect_nameself.rnn_size = rnn_sizeself.fc_size = fc_sizeself.keep_prob = keep_probdef prepare_for_prediction(self, pb_file_path=None):"""加载计算图:param pb_file_path: pb文件:return:"""if pb_file_path == None:pb_file_path = self.pb_fileif not os.path.exists(pb_file_path):print('ERROR: %s NOT exists, when load_pb_for_predict()' % pb_file_path)return -1self.graph = tf.Graph()# 从pb文件导入计算图with self.graph.as_default():with open(pb_file_path, "rb") as f:graph_def = tf.GraphDef()graph_def.ParseFromString(f.read())tf.import_graph_def(graph_def, name="")self.x = self.graph.get_tensor_by_name('x-input:0')self.w = self.graph.get_tensor_by_name('w-input:0')self.rnn_cls = self.graph.get_tensor_by_name('rnn_cls:0')self.rnn_ver = self.graph.get_tensor_by_name('rnn_ver:0')self.rnn_hor = self.graph.get_tensor_by_name('rnn_hor:0')print('graph loaded for prediction')self.sess = tf.Session(graph=self.graph, config=self.sess_config)def predict(self, img_file, out_dir=None):""":param img_file: 图像路径. [str]:param out_dir: 输出保存路径. [str]:return:"""# 加载图像img = Image.open(img_file)# 图片预处理# img_data = data_loader.mean_gray(img_data)# img_data = data_loader.two_value_binary(img_data)# img_data = data_loader.convert2rgb(img_data)# 对图像进行放缩img_size = img.size # (width, height)im_size_min = np.min(img_size[0:2])im_size_max = np.max(img_size[0:2])im_scale = float(600) / float(im_size_min)if np.round(im_scale * im_size_max) > 800:im_scale = float(800) / float(im_size_max)width = int(img_size[0] * im_scale)height = int(img_size[1] * im_scale)img = img.resize((width, height), Image.ANTIALIAS)# re_im = cv2.resize(img, None, None, fx=im_scale, fy=im_scale, interpolation=cv2.INTER_LINEAR)# 对图像进行标准化img_data = np.array(img, dtype=np.float32) / 255try:img_data = [img_data[:, :, 0:3]] # rgbaexcept:img_data = [img_data[:, :, 0:2]] # rgbw_arr = np.array([width], dtype=np.int32)# 开始预测with self.graph.as_default():feed_dict = {self.x: img_data, self.w: w_arr}r_cls, r_ver, r_hor = self.sess.run([self.rnn_cls, self.rnn_ver, self.rnn_hor], feed_dict)text_bbox, conf_bbox = data_loader.trans_results(r_cls, r_ver, r_hor, \self.anchor_heights, self.threshold)# refinementconn_bbox = data_loader.do_nms_and_connection(text_bbox, conf_bbox)if out_dir == None:return conn_bbox, text_bbox, conf_bboxif not os.path.exists(out_dir):os.mkdir(out_dir)# 绘制anchor文本线filename = os.path.basename(img_file)basename, _ = os.path.splitext(filename)file_target = os.path.join(out_dir, 'predicted_' + basename + '.png')img_target = Image.fromarray(np.uint8(img_data[0] * 255)) # .convert('RGB')img_target.save(file_target)data_loader.draw_text_boxes(file_target, text_bbox)# 绘制多个anchor连接后的文本线file_target = os.path.join(out_dir, 'connected_' + basename + '.png')img_target = Image.fromarray(np.uint8(img_data[0] * 255)) # .convert('RGB')img_target.save(file_target)data_loader.draw_text_boxes(file_target, conn_bbox)return conn_bbox, text_bbox, conf_bboxdef create_graph_all(self, training):"""创建计算图:param training: 参数是否可训练. [boolean]:return:"""self.is_train = trainingself.graph = tf.Graph()with self.graph.as_default():# 初始化变量self.x = tf.placeholder(tf.float32, (1, None, None, 3), name='x-input')self.w = tf.placeholder(tf.int32, (1,), name='w-input') # widthself.t_cls = tf.placeholder(tf.float32, (None, None, None), name='c-input')self.t_ver = tf.placeholder(tf.float32, (None, None, None), name='v-input')self.t_hor = tf.placeholder(tf.float32, (None, None, None), name='h-input')# 卷积层,结合resnet结构self.conv_feat, self.seq_len = self.conv_feat_layers(self.x, self.w, self.is_train)# BI_LSTM + 全连接层self.rnn_cls, self.rnn_ver, self.rnn_hor = self.rnn_detect_layers(self.conv_feat,self.seq_len,len(self.anchor_heights))# 模型的损失函数self.loss = self.detect_loss(self.rnn_cls,self.rnn_ver,self.rnn_hor,self.t_cls,self.t_ver,self.t_hor)# 设置优化函数self.global_step = tf.train.get_or_create_global_step()self.learning_rate = tf.get_variable("learning_rate", shape=[], dtype=tf.float32, trainable=False)optimizer = tf.train.AdamOptimizer(learning_rate=self.learning_rate, beta1=self.MOMENTUM)grads_applying = optimizer.compute_gradients(self.loss)self.train_op = optimizer.apply_gradients(grads_applying, global_step=self.global_step)if self.is_train:print('graph defined for training')else:print('graph defined for validation')def train_and_valid(self, data_train, data_valid):"""训练模型:param data_train: 训练集图像路径列表. [list]:param data_valid: 测试集图像路径列表. [list]:return:"""# 创建模型存储路径if not os.path.exists(self.model_detect_dir):os.mkdir(self.model_detect_dir)# 构建计算图self.create_graph_all(training=True)# 加载和训练模型with self.graph.as_default():saver = tf.train.Saver()with tf.Session(config=self.sess_config) as sess:# 初始化变量tf.global_variables_initializer().run()sess.run(tf.assign(self.learning_rate, tf.constant(self.learning_rate_base, dtype=tf.float32)))# 加载模型ckpt = tf.train.get_checkpoint_state(self.model_detect_dir)# 加载模型if ckpt and ckpt.model_checkpoint_path:saver.restore(sess, ckpt.model_checkpoint_path)# 开始训练print('begin to train ...')start_time = time.time()begin_time = start_timestep = sess.run(self.global_step)train_step_half = int(self.train_steps * 0.5)train_step_quar = int(self.train_steps * 0.75)while step < self.train_steps:# 训练次数达到总的迭代次数的一半时,将学习率设置为原来的0.1,# 当训练次数达到总的迭代次数的3/4时,将学习率设置为原来的0.01if step == train_step_half:sess.run(tf.assign(self.learning_rate, tf.constant(self.learning_rate_base / 10, dtype=tf.float32)))if step == train_step_quar:sess.run(tf.assign(self.learning_rate, tf.constant(self.learning_rate_base / 100, dtype=tf.float32)))# 保存和验证模型if (step + 1) % self.valid_freq == 0:# 保存模型print('save model to ckpt ...')saver.save(sess, os.path.join(self.model_detect_dir, self.model_detect_name),global_step=step)# 验证模型print('validating ...')model_v = ModelDetect(self.model_detect_dir,self.model_detect_pb_file,self.learning_rate_base,self.train_steps,self.valid_freq,self.loss_freq,self.keep_near,self.keep_freq,self.anchor_heights,self.MOMENTUM,self.dir_results_valid,self.threshold,self.model_detect_name,self.rnn_size,self.fc_size,1.0)model_v.validate(data_valid, step)# 从训练集中随机抽选一张照片img_file = random.choice(data_train)if not os.path.exists(img_file):print('image_file: %s NOT exist' % img_file)continue# 获取该图像的文本线文档路径txt_file = data_loader.get_target_txt_file(img_file)if not os.path.exists(txt_file):print('label_file: %s NOT exist' % txt_file)continue# 加载图像,并获取对应的真实标签img_data, feat_size, target_cls, target_ver, target_hor = \data_loader.get_image_and_targets(img_file, txt_file, self.anchor_heights)# 开始训练img_size = img_data[0].shape # height, width, channelw_arr = np.array([img_size[1]], dtype=np.int32)feed_dict = {self.x: img_data,self.w: w_arr,self.t_cls: target_cls,self.t_ver: target_ver,self.t_hor: target_hor}_, loss_value, step, lr = sess.run([self.train_op, self.loss, self.global_step, self.learning_rate],feed_dict)if step % self.loss_freq == 0:curr_time = time.time()print('step: %d, loss: %g, lr: %g, sect_time: %.1f, total_time: %.1f, %s' %(step, loss_value, lr,curr_time - begin_time,curr_time - start_time,os.path.basename(img_file)))begin_time = curr_timedef validate(self, data_valid, step):"""模型验证函数:param data_valid: 验证集图像路径列表. [list]:param step: 当前迭代的次数. [int]:return:"""# 判断验证集路径是否存在if not os.path.exists(self.dir_results_valid):os.mkdir(self.dir_results_valid)# 初始化计算图self.create_graph_all(training=False)with self.graph.as_default():saver = tf.train.Saver()with tf.Session(config=self.sess_config) as sess:# 初始化全局变量tf.global_variables_initializer().run()# 加载模型ckpt = tf.train.get_checkpoint_state(self.model_detect_dir)if ckpt and ckpt.model_checkpoint_path:saver.restore(sess, ckpt.model_checkpoint_path)# 将变量转化为常数,并保存到pb文件constant_graph = graph_util.convert_variables_to_constants(sess, sess.graph_def,output_node_names=['rnn_cls', 'rnn_ver', 'rnn_hor'])with tf.gfile.FastGFile(self.pb_file, mode='wb') as f:f.write(constant_graph.SerializeToString())# 开始预测NumImages = len(data_valid)curr = 0for img_file in data_valid:print(img_file)# 获取当前图像的文本线txt文档的存储路径txt_file = data_loader.get_target_txt_file(img_file)# 获取当前图像的像素矩阵、feature map维度以及三个分支的标签img_data, feat_size, target_cls, target_ver, target_hor = \data_loader.get_image_and_targets(img_file, txt_file, self.anchor_heights)# 当前图像的尺寸img_size = img_data[0].shape # height, width, channelw_arr = np.array([img_size[1]], dtype=np.int32)feed_dict = {self.x: img_data,self.w: w_arr,self.t_cls: target_cls,self.t_ver: target_ver,self.t_hor: target_hor}# 获取预测到的标签和损失值r_cls, r_ver, r_hor, loss_value = sess.run([self.rnn_cls, self.rnn_ver, self.rnn_hor, self.loss], feed_dict)curr += 1print('curr: %d / %d, loss: %f' % (curr, NumImages, loss_value))# 将相对坐标转化为原始图像的绝对坐标,获取预测到的文本线坐标和分数text_bbox, conf_bbox = data_loader.trans_results(r_cls,r_ver,r_hor,self.anchor_heights,self.threshold)# 在图像上绘制文本线,并保存filename = os.path.basename(img_file)file_target = os.path.join(self.dir_results_valid, str(step) + '_predicted_' + filename)img_target = Image.fromarray(np.uint8(img_data[0] * 255)) # .convert('RGB')img_target.save(file_target)data_loader.draw_text_boxes(file_target, text_bbox)# 移除之前验证的文件id_remove = step - self.valid_freq * self.keep_nearif id_remove % self.keep_freq:file_temp = os.path.join(self.dir_results_valid, str(id_remove) + '_predicted_' + filename)if os.path.exists(file_temp): os.remove(file_temp)print('validation finished')def norm_layer(self, x, train, eps=1e-05, decay=0.9, affine=True, name=None):"""批标准化:param x:输入. [tensor]:param train: 是否可训练. [boolean]:param eps::param decay::param affine::param name::return:"""with tf.variable_scope(name, default_name='batch_norm'):params_shape = [x.shape[-1]]batch_dims = list(range(0, len(x.shape) - 1))moving_mean = tf.get_variable('mean', params_shape,initializer=tf.zeros_initializer(),trainable=False)moving_variance = tf.get_variable('variance', params_shape,initializer=tf.ones_initializer(),trainable=False)def mean_var_with_update():# 计算均值和方差batch_mean, batch_variance = tf.nn.moments(x, batch_dims, name='moments')# 更新moving_mean和moving_variancewith tf.control_dependencies([assign_moving_average(moving_mean, batch_mean, decay),assign_moving_average(moving_variance, batch_variance, decay)]):return tf.identity(batch_mean), tf.identity(batch_variance)if train:mean, variance = mean_var_with_update()else:mean, variance = moving_mean, moving_varianceif affine:beta = tf.get_variable('beta', params_shape,initializer=tf.zeros_initializer(),trainable=True)gamma = tf.get_variable('gamma', params_shape,initializer=tf.ones_initializer(),trainable=True)x = tf.nn.batch_normalization(x, mean, variance, beta, gamma, eps)else:x = tf.nn.batch_normalization(x, mean, variance, None, None, eps)return xdef conv_layer(self, inputs, params, training):"""定义卷积层,带有batch_normalization,relu:param inputs: 输入数据维度为 4-D tensor: [batch_size, width, height, channels]or [batch_size, height, width, channels]:param params: 卷积层参数,[filters, kernel_size, strides, padding, batch_norm, relu, name]. [list]:param training: 参数是否可以训练. [boolean]:return:"""kernel_initializer = tf.contrib.layers.variance_scaling_initializer()bias_initializer = tf.constant_initializer(value=0.0)gamma_initializer = tf.random_normal_initializer(1, 0.02)# convoutputs = tf.layers.conv2d(inputs, params[0], params[1], strides=params[2],padding=params[3],kernel_initializer=kernel_initializer,bias_initializer=bias_initializer,name=params[6])# batch_normif params[4]:outputs = self.norm_layer(outputs, training, name=params[6] + '/batch_norm')# outputs = tf.layers.batch_normalization(inputs,# axis=3,# epsilon=1e-5,# momentum=0.1,# training=training,# gamma_initializer=gamma_initializer,# name=params[6] + '/batch_norm')# reluif params[5]:outputs = tf.nn.relu(outputs, name=params[6] + '/relu')return outputsdef block_resnet_others(self, inputs, layer_params, relu, training, name):"""定义ResNet_block:param inputs: 输入. [tensor]:param layer_params: 卷积层参数. [list]:param relu: 是否使用relu激活函数. [boolean]:param training: 参数是否可以训练. [boolean]:param name: layer name. [str]:return:"""with tf.variable_scope(name):short_cut = tf.identity(inputs)for item in layer_params:inputs = self.conv_layer(inputs, item, training)outputs = tf.add(inputs, short_cut, name='add')if relu:outputs = tf.nn.relu(outputs, 'last_relu')return outputsdef conv_feat_layers(self, inputs, width, training):"""cptn结构中的卷积层部分,用来提取feature_map.:param inputs: 输入的图像. [placeholder]:param width: 图像宽度. [placeholder]:param training:是否可训练. [boolean]:return:"""# 卷积层各层的参数信息layer_params = [[64, (3, 3), (1, 1), 'same', True, True, 'conv1'],[128, (3, 3), (1, 1), 'same', True, True, 'conv2'],[128, (2, 2), (2, 2), 'valid', True, True, 'pool1'],[128, (3, 3), (1, 1), 'same', True, True, 'conv3'],[256, (3, 3), (1, 1), 'same', True, True, 'conv4'],[256, (2, 2), (2, 2), 'valid', True, True, 'pool2'],[256, (3, 3), (1, 1), 'same', True, True, 'conv5'],[512, (3, 3), (1, 1), 'same', True, True, 'conv6'],[512, (3, 2), (3, 2), 'valid', True, True, 'pool3'],[512, (3, 1), (1, 1), 'valid', True, True, 'conv_feat']]resnet_params = [[[128, 3, (1, 1), 'same', True, True, 'conv1'],[128, 3, (1, 1), 'same', True, False, 'conv2']],[[256, 3, (1, 1), 'same', True, True, 'conv1'],[256, 3, (1, 1), 'same', True, False, 'conv2']],[[512, 3, (1, 1), 'same', True, True, 'conv1'],[512, 3, (1, 1), 'same', True, False, 'conv2']]]# 构建卷积层with tf.variable_scope("conv_comm"):inputs = self.conv_layer(inputs, layer_params[0], training)inputs = self.conv_layer(inputs, layer_params[1], training)inputs = tf.pad(inputs, [[0, 0], [0, 1], [0, 1], [0, 0]], name='padd1')inputs = tf.layers.max_pooling2d(inputs, (2, 2), (2, 2), 'valid', 'channels_last', 'pool1')inputs = self.block_resnet_others(inputs, resnet_params[0], True, training, 'res1')inputs = self.conv_layer(inputs, layer_params[3], training)inputs = self.conv_layer(inputs, layer_params[4], training)inputs = tf.pad(inputs, [[0, 0], [0, 1], [0, 1], [0, 0]], name='padd2')inputs = tf.layers.max_pooling2d(inputs, (2, 2), (2, 2), 'valid', 'channels_last', 'pool2')inputs = self.block_resnet_others(inputs, resnet_params[1], True, training, 'res2')inputs = self.conv_layer(inputs, layer_params[6], training)inputs = self.conv_layer(inputs, layer_params[7], training)inputs = tf.pad(inputs, [[0, 0], [0, 0], [0, 1], [0, 0]], name='padd3')inputs = tf.layers.max_pooling2d(inputs, (3, 2), (3, 2), 'valid', 'channels_last', 'pool3')inputs = self.block_resnet_others(inputs, resnet_params[2], True, training, 'res3')conv_feat = self.conv_layer(inputs, layer_params[9], training)feat_size = tf.shape(conv_feat)# 计算每个feature_map每一行的序列长度,每一行即一个序列two = tf.constant(2, dtype=tf.float32, name='two')w = tf.cast(width, tf.float32)for i in range(3):w = tf.div(w, two)w = tf.ceil(w)# 复制height倍,并转化为向量w = tf.cast(w, tf.int32)w = tf.tile(w, [feat_size[1]])sequence_length = tf.reshape(w, [-1], name='seq_len') # [batch,height]return conv_feat, sequence_lengthdef rnn_detect_layers(self, conv_feat, sequence_length, num_anchors):"""Bi_LSTM + 全连接层.:param conv_feat: 卷积层提取到的feature map. [tensor]:param sequence_length: 每一行序列的长度列表,向量长度为conv_feat的高. [tensor]:param num_anchors: anchor的个数:return:"""# 将feature map进行降维,因为batch_size设置为1,所以这里直接去掉batch那一维conv_feat = tf.squeeze(conv_feat, axis=0)conv_feat = tf.transpose(conv_feat, [1, 0, 2])# Bi_LSTM层en_lstm1 = tf.contrib.rnn.LSTMCell(self.rnn_size)en_lstm1 = tf.contrib.rnn.DropoutWrapper(en_lstm1, output_keep_prob=self.keep_prob)en_lstm2 = tf.contrib.rnn.LSTMCell(self.rnn_size)en_lstm2 = tf.contrib.rnn.DropoutWrapper(en_lstm2, output_keep_prob=self.keep_prob)# encoder_cell_fw = tf.contrib.rnn.MultiRNNCell([en_lstm1])# encoder_cell_bw = tf.contrib.rnn.MultiRNNCell([en_lstm2])bi_encoder_outputs, _ = tf.nn.bidirectional_dynamic_rnn(en_lstm1,en_lstm2,conv_feat,sequence_length=sequence_length,time_major=True,dtype=tf.float32) # 2 * batch_size * seq_len * hidden_dimconv_feat = tf.concat(bi_encoder_outputs, 2)# 全连接层weight_initializer = tf.contrib.layers.variance_scaling_initializer()bias_initializer = tf.constant_initializer(value=0.0)rnn_feat = tf.layers.dense(conv_feat, self.fc_size,activation=tf.nn.relu,kernel_initializer=weight_initializer,bias_initializer=bias_initializer,name='rnn_feat')# 输出层,总共三个分支rnn_cls = tf.layers.dense(rnn_feat, num_anchors * 2,activation=tf.nn.sigmoid,kernel_initializer=weight_initializer,bias_initializer=bias_initializer,name='text_cls')rnn_ver = tf.layers.dense(rnn_feat, num_anchors * 2,activation=tf.nn.tanh,kernel_initializer=weight_initializer,bias_initializer=bias_initializer,name='text_ver')rnn_hor = tf.layers.dense(rnn_feat, num_anchors * 2,activation=tf.nn.tanh,kernel_initializer=weight_initializer,bias_initializer=bias_initializer,name='text_hor')rnn_cls = tf.transpose(rnn_cls, perm=[1, 0, 2], name='rnn_cls')rnn_ver = tf.transpose(rnn_ver, perm=[1, 0, 2], name='rnn_ver')rnn_hor = tf.transpose(rnn_hor, perm=[1, 0, 2], name='rnn_hor')return rnn_cls, rnn_ver, rnn_hordef detect_loss(self, rnn_cls, rnn_ver, rnn_hor, target_cls, target_ver, target_hor):"""模型损失函数.:param rnn_cls:预测得到的cls,即分类概率.:param rnn_ver:预测得到的ver,anchor的y坐标中心.:param rnn_hor:预测得到的hor,anchor的x坐标.:param target_cls:真实的cls:param target_ver:真实的ver:param target_hor:真实的hor:return:"""# 计算正例和负例对应的rnn_clsrnn_cls_posi = rnn_cls * target_clsrnn_cls_neg = rnn_cls - rnn_cls_posi# 计算类别的平方损失pow_posi = tf.square(rnn_cls_posi - target_cls)pow_neg = tf.square(rnn_cls_neg)# 对损失进行加权mod_posi = tf.pow(pow_posi / 0.24, 5) # 0.3, 0.2, 0.5,0.4mod_neg = tf.pow(pow_neg / 0.24, 5) # 0.7, 0.6,mod_con = tf.pow(0.25 / 0.2, 5)# 统计正例和负例的个数num_posi = tf.reduce_sum(target_cls) / 2 + 1num_neg = tf.reduce_sum(target_cls + 1) / 2 - num_posi * 2 + 1# 计算正例和负例的损失值loss_cls_posi = tf.reduce_sum(pow_posi * mod_posi) / 2loss_cls_neg = tf.reduce_sum(pow_neg * mod_neg) / 2# 将正例和负例的损失分别计算平均值,最终加和,# 因为同一张图像会出现较多负例,所以这样要比两者加和后再计算平均好一点loss_cls = loss_cls_posi / num_posi + loss_cls_neg / num_negprint('loss_cls:%s' % str(loss_cls))# 计算正例的rnn_ver和rnn_horrnn_ver_posi = rnn_ver * target_clsrnn_hor_posi = rnn_hor * target_cls# 计算负例的rnn_ver和rnn_horrnn_ver_neg = rnn_ver - rnn_ver_posirnn_hor_neg = rnn_hor - rnn_hor_posi# 计算正例的ver和hor平方损失pow_ver_posi = tf.square(rnn_ver_posi - target_ver)pow_hor_posi = tf.square(rnn_hor_posi - target_hor)# 计算负例的ver和hor的平方损失pow_ver_neg = tf.square(rnn_ver_neg)pow_hor_neg = tf.square(rnn_hor_neg)# 对正例的平方损失进行加权并计算平均,这里有点类似focal loss的思想loss_ver_posi = tf.reduce_sum(pow_ver_posi * mod_con) / num_posiloss_hor_posi = tf.reduce_sum(pow_hor_posi * mod_con) / num_posi# 对负例的平方损失进行加权并计算平均loss_ver_neg = tf.reduce_sum(pow_ver_neg * mod_neg) / num_negloss_hor_neg = tf.reduce_sum(pow_hor_neg * mod_neg) / num_neg# 对正负例的ver和hor损失进行加总loss_ver = loss_ver_posi + loss_ver_negloss_hor = loss_hor_posi + loss_hor_negloss = tf.add(loss_cls, loss_ver + 2 * loss_hor, name='loss')return loss
下面是一些数据预处理函数,代码如下:
import os
from PIL import Image, ImageDraw
import numpy as np
from math import ceil, floor
from operator import itemgetterdef getFilesInDirect(path, str_dot_ext):"""获取背景图像路径列表:param path: 背景图像存储路径. [str]:param str_dot_ext: 背景图像的存储格式. [str]:return:"""file_list = []for file in os.listdir(path):file_path = os.path.join(path, file)if os.path.splitext(file_path)[1] == str_dot_ext:file_list.append(file_path)return file_listdef get_files_with_ext(path, str_ext):"""获取具有str_ext结尾的文件路径列表:param path: 文件目录. [str]:param str_ext: 文件格式,如.png. [str]:return:"""file_list = []for file in os.listdir(path):file_path = os.path.join(path, file)if file_path.endswith(str_ext):file_list.append(file_path)return file_listdef get_target_txt_file(img_file):"""加载对应图像的文本线文档对应的路径:param img_file: 图像路径. [str]:return:"""# 或者文本线存储目录pre_dir = os.path.abspath(os.path.dirname(img_file) + os.path.sep + "..")txt_dir = os.path.join(pre_dir, 'contents')# 加载对应图像的文本线文档filename = os.path.basename(img_file)arr_split = os.path.splitext(filename)filename = arr_split[0] + '.txt'txt_file = os.path.join(txt_dir, filename)return txt_filedef get_list_contents(content_file):"""获取文本线文档中的坐标和标签,并转化为列表,类似[[[1,2,3,4],'hello']]:param content_file: 文本线文档路径. [str]:return:"""contents = []if not os.path.exists(content_file):return contentswith open(content_file, 'r', encoding='utf-8') as fp:lines = fp.readlines()for line in lines:arr_str = line.split('|')item = list(map(lambda x: int(x), arr_str[0].split(',')))contents.append([item, arr_str[1]])return contentsdef get_image_and_targets(img_file, txt_file, anchor_heights):"""加载图像,并获取图像卷积后的尺寸和真实标签:param img_file: 图像的路径. [str]:param txt_file: 图像对应的文本线文档路径. [str]:param anchor_heights: anchor高度列表. [list]:return:"""# 加载图像img = Image.open(img_file)img_data = np.array(img, dtype=np.float32) / 255 # [height, width, channel]# 获取图像的rgb通道try:img_data = img_data[:, :, 0:3]except:img_data = img_data[:, :, 0:2]# 获取各个文本线的坐标和标注,并转化为列表txt_list = get_list_contents(txt_file)# targetsimg_size = img_data.shape # height, width, channel# 计算卷积后feature map的高和宽height_feat = floor(ceil(ceil(img_size[0] / 2.0) / 2.0) / 3.0) - 2width_feat = ceil(ceil(ceil(img_size[1] / 2.0) / 2.0) / 2.0)# 初始化三个分支的目标值num_anchors = len(anchor_heights)target_cls = np.zeros((height_feat, width_feat, 2 * num_anchors))target_ver = np.zeros((height_feat, width_feat, 2 * num_anchors))target_hor = np.zeros((height_feat, width_feat, 2 * num_anchors))# 计算feature map上每个点的对应的真实标签ash = 12 # anchor stride - heightasw = 8 # anchor stride - widthhc_start = 18wc_start = 4for h in range(height_feat):hc = hc_start + ash * h # anchor height centerfor w in range(width_feat):cls, ver, hor = calculate_targets_at([hc, wc_start + asw * w], txt_list, anchor_heights)target_cls[h, w] = clstarget_ver[h, w] = vertarget_hor[h, w] = horreturn [img_data], [height_feat, width_feat], target_cls, target_ver, target_hordef calculate_targets_at(anchor_center, txt_list, anchor_heights):"""计算当前anchor的真实标签:param anchor_center: anchor的中心,[height_center,width_center]. [list]:param txt_list: 文本线列表. [list]:param anchor_heights: anchor高度列表. [list]:return:"""# anchor宽度和anchor高度、宽度步伐anchor_width = 8ash = 12 # anchor stride - heightasw = 8 # anchor stride - width# anchor中心hc = anchor_center[0]wc = anchor_center[1]# 初始化maxIoU和anchor_posimaxIoU = 0anchor_posi = 0text_bbox = []# 检测当前anchor是否包含文本,若存在,选择IoU最大的作为正例for item in txt_list:# 当前文本线的四个坐标bbox = item[0]flag = 0# 如果当前的anchor宽度中心刚好落在文本线内,则标记为1# 如果当前的文本线落在anchor宽度中心~anchor宽度中心+8范围内,并且比较靠近anchor宽度中心,则标记为1# 如果当前的文本线落在anchor宽度中心-8~anchor宽度中心范围内,并且比较靠近anchor宽度中心,则标记为1if bbox[0] < wc and wc <= bbox[2]:flag = 1elif wc < bbox[0] and bbox[2] < wc + asw:if bbox[0] - wc < wc + asw - bbox[2]:flag = 1elif wc - asw < bbox[0] and bbox[2] < wc:if bbox[2] - wc <= wc - asw - bbox[0]:flag = 1if flag == 0: continue# 文本线高度中心bcenter = (bbox[1] + bbox[3]) / 2.0# anchor的中心不能距离真实中心太远d0 = abs(hc - bcenter)dm = abs(hc - ash - bcenter)dp = abs(hc + ash - bcenter)if d0 < ash and d0 <= dm and d0 < dp:passelse:continue# 当检测到文本时,计算各个anchor的IoU,选择其中最大的作为正例posi = 0for ah in anchor_heights:hah = ah // 2 # half_ahIoU = 1.0 * (min(hc + hah, bbox[3]) - max(hc - hah, bbox[1])) \/ (max(hc + hah, bbox[3]) - min(hc - hah, bbox[1]))if IoU > maxIoU:maxIoU = IoUanchor_posi = positext_bbox = bboxposi += 1break# 当检测不到文本时,三个分支的标签都用0表示if maxIoU <= 0: #num_anchors = len(anchor_heights)cls = [0, 0] * num_anchorsver = [0, 0] * num_anchorshor = [0, 0] * num_anchorsreturn cls, ver, hor# 检测出包含文本时,则最大IoU对应的anchor作为正例,其他作为负例cls = []ver = []hor = []for idx, ah in enumerate(anchor_heights):if not idx == anchor_posi:cls.extend([0, 0])ver.extend([0, 0])hor.extend([0, 0])continuecls.extend([1, 1])half_ah = ah // 2half_aw = anchor_width // 2# 计算anchor的绝对坐标anchor_bbox = [wc - half_aw, hc - half_ah, wc + half_aw, hc + half_ah]# 计算相对坐标,对anchor坐标进行修正ratio_bbox = [0, 0, 0, 0]ratio = (text_bbox[0] - anchor_bbox[0]) / anchor_widthif abs(ratio) < 1:ratio_bbox[0] = ratioratio = (text_bbox[2] - anchor_bbox[2]) / anchor_widthif abs(ratio) < 1:ratio_bbox[2] = ratioratio_bbox[1] = (text_bbox[1] - anchor_bbox[1]) / ahratio_bbox[3] = (text_bbox[3] - anchor_bbox[3]) / ahver.extend([ratio_bbox[1], ratio_bbox[3]])hor.extend([ratio_bbox[0], ratio_bbox[2]])return cls, ver, hordef trans_results(r_cls, r_ver, r_hor, anchor_heights, threshold):"""将相对坐标转化为原始图像的绝对坐标,获取预测到的文本线坐标和分数:param r_cls: cls标签:param r_ver: ver标签:param r_hor: hor标签:param anchor_heights: anchor高度列表. [list]:param threshold: 分类阈值. [float]:return:"""anchor_width = 8ash = 12 # anchor stride - heightasw = 8 # anchor stride - widthhc_start = 18wc_start = 4aw = anchor_widthlist_bbox = []list_conf = []feat_shape = r_cls.shapefor h in range(feat_shape[0]):for w in range(feat_shape[1]):if max(r_cls[h, w, :]) < threshold:continue# 获取概率最大的anchoranchor_posi = np.argmax(r_cls[h, w, :]) # in r_clsanchor_id = anchor_posi // 2 # in anchor_heights# 计算anchor的坐标ah = anchor_heights[anchor_id] #anchor_posi = anchor_id * 2 # for retrieve in r_ver, r_horhc = hc_start + ash * h # anchor centerwc = wc_start + asw * w # anchor centerhalf_ah = ah // 2half_aw = aw // 2anchor_bbox = [wc - half_aw, hc - half_ah, wc + half_aw, hc + half_ah]# 计算预测到的文本线的坐标text_bbox = [0, 0, 0, 0]text_bbox[0] = anchor_bbox[0] + aw * r_hor[h, w, anchor_posi]text_bbox[1] = anchor_bbox[1] + ah * r_ver[h, w, anchor_posi]text_bbox[2] = anchor_bbox[2] + aw * r_hor[h, w, anchor_posi + 1]text_bbox[3] = anchor_bbox[3] + ah * r_ver[h, w, anchor_posi + 1]list_bbox.append(text_bbox)list_conf.append(max(r_cls[h, w, :]))return list_bbox, list_confdef draw_text_boxes(img_file, text_bbox):"""对图像绘制文本线:param img_file: 图像对应的路径. [str]:param text_bbox: 文本线坐标. [list]:return:"""img_draw = Image.open(img_file)draw = ImageDraw.Draw(img_draw)for item in text_bbox:xs = item[0]ys = item[1]xe = item[2]ye = item[3]line_width = 1 # round(text_size/10.0)draw.line([(xs, ys), (xs, ye), (xe, ye), (xe, ys), (xs, ys)],width=line_width, fill=(255, 0, 0))img_draw.save(img_file)def do_nms_and_connection(list_bbox, list_conf):"""将anchor连接为文本框:param list_bbox: anchor list,每个anchor包含左上右下四个坐标.[list]:param list_conf: anchor概率list,存放每个anchor为前景的概率,同list_bbox对应.[list]:return: 返回连接anchor后的文本框conn_bboxlist,每个文本框包含左上右下的四个坐标,[list]"""# #设置anchor连接的最大距离,两个anchor距离大于50,则处理为两个文本框,反之则连接两个文本框# max_margin = 50# len_list_box = len(list_bbox)# conn_bbox = []# head = tail = 0# for i in range(1, len_list_box):# distance_i_j = abs(list_bbox[i][0] - list_bbox[i - 1][0])# overlap_i_j = overlap(list_bbox[i][1], list_bbox[i][3], list_bbox[i - 1][1], list_bbox[i - 1][3])# if distance_i_j < max_margin and overlap_i_j > 0.7:# tail = i# if i == len_list_box - 1:# this_test_box = [list_bbox[head][0], list_bbox[head][1], list_bbox[tail][2], list_bbox[tail][3]]# conn_bbox.append(this_test_box)# head = tail = i# else:# this_test_box = [list_bbox[head][0], list_bbox[head][1], list_bbox[tail][2], list_bbox[tail][3]]# conn_bbox.append(this_test_box)# head = tail = i# 获取每个anchor的近邻,判断条件是两个anchor之间的距离必须小于50个像素点,并且在垂直方向的重合度大于0.4neighbor_list = []for i in range(len(list_bbox) - 1):this_neighbor_list = [i]for j in range(i + 1, len(list_bbox)):distance_i_j = abs(list_bbox[i][2] - list_bbox[j][0])overlap_i_j = overlap(list_bbox[i][1], list_bbox[i][3], list_bbox[j][1], list_bbox[j][3])if distance_i_j < 50 and overlap_i_j > 0.4:this_neighbor_list.append(j)neighbor_list.append(this_neighbor_list)# 对每个近邻列表进行合并,一旦两个列表之间有共同的元素,则将他们并在一起conn_bbox = []while len(neighbor_list) > 0:this_conn_bbox = set(neighbor_list[0])filter_list = [0]for i in range(1, len(neighbor_list)):if len(this_conn_bbox & set(neighbor_list[i])) > 0:this_conn_bbox = this_conn_bbox | set(neighbor_list[i])filter_list.append(i)min_x = min([list_bbox[i][0] for i in list(this_conn_bbox)])min_y = np.mean([list_bbox[i][1] for i in list(this_conn_bbox)])max_x = max([list_bbox[i][2] for i in list(this_conn_bbox)])max_y = np.mean([list_bbox[i][3] for i in list(this_conn_bbox)])conn_bbox.append([min_x, min_y, max_x, max_y])neighbor_list = [neighbor_list[i] for i in range(len(neighbor_list)) if i not in filter_list]return conn_bboxdef overlap(h_up1, h_dw1, h_up2, h_dw2):"""计算垂直重合度:param h_up1::param h_dw1::param h_up2::param h_dw2::return:"""overlap_value = (min(h_dw1, h_dw2) - max(h_up1, h_up2)) \/ (max(h_dw1, h_dw2) - min(h_up1, h_up2))return overlap_valuedef mean_gray(img):"""图像灰度处理,均值法(多个通道的均值):param img: img为通过cv2.imread()读入的图片:return: 均值法灰度化的图片数组"""row, col, channel = img.shapeimg_gray = np.zeros(shape=(row, col))for r in range(row):for l in range(col):img_gray[r, l] = img[r, l, :].mean()return img_graydef two_value_binary(img_gray, threshold=100, reverse=False):"""二值法数据增强.:param img_gray: 灰度化后的图片数组.:param threshold: 二值化阈值, 大于阈值设为255, 小于阈值设为0.:param reverse:是否将前景和背景反转,默认False.[boolean]:return:"""threshold /= 255img_binary = np.zeros_like(img_gray)row, col = img_binary.shapefor i in range(row):for j in range(col):if img_gray[i, j] >= threshold:img_binary[i, j] = 1if reverse:img_binary[i, j] = 1 - img_binary[i, j]return img_binarydef convert2rgb(img_binary):"""将二值化后图片改为三通道:param img_binary: 二值化后的图片,维度:二维.[numpy.ndarray]:return:"""rows, cols = img_binary.shapeimg_binary_rgb = np.zeros((rows, cols, 3))for i in range(rows):for j in range(cols):img_binary_rgb[i, j, 0:3] = np.tile(img_binary[i, j], 3)return img_binary_rgb
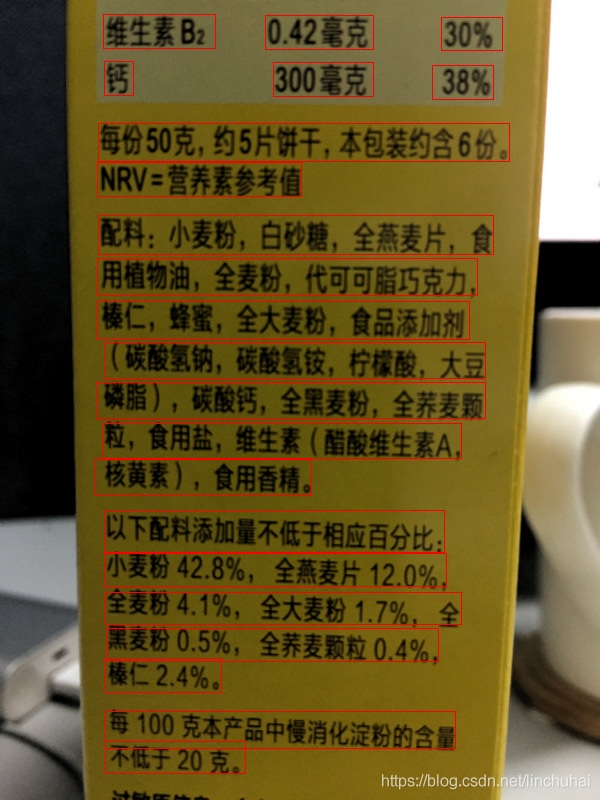
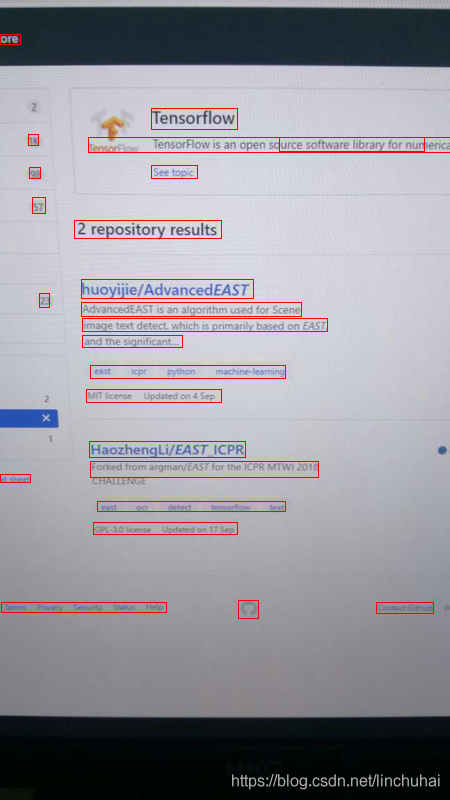
在ICDAR数据集上迭代250000次后,达到的效果如下:
4.CTPN的优缺点总结
首先讲一下CTPN的优点吧,大致可以总结为以下几个方面:
- 将文本检测任务转化为一系列细比例尺的文本提取,并提出了一种anchor回归机制,可以同时预测垂直位置和提取出的文本是否是文本的分数。
- 用RNN将从CNN提取出来的文本进行连接,可以获取到文本行的上下文信息,使得文本检测更加可靠。
- 可以兼容多尺度或多语言的文本检测,并且模型的pipeline比较简洁。
- 对图像的检测速度快。
但是CTPN也存在一些缺点,比如对于一些旋转的文本行,其检测效果还是一般,并且文本线的构造也是局限在矩形,当文本出现倾斜时,文本线的构造就显得不够优雅,但是总而言之,该模型还是对文本检测带来了巨大的影响。
招聘信息:
熊猫书院算法工程师:
https://www.lagou.com/jobs/4842081.html
希望对深度学习算法感兴趣的小伙伴们可以加入我们,一起改变教育!